With the launch of an excellent solution by our community member Alex - https://discuss.ardupilot.org/t/an-open-source-frsky-telemetry-script-for-the-taranis-x9d-x9e-and-qx7-radios the interest on building a cheap solution to enable direct FrSky telemetry has grown and the information is quite disperse, so this is to document how to build a small, cheap signal inverter, specifically to be used with regular PixHawk / Cube / Navio 2 flight controllers. Please note that on the PixRacer this is not required because the PixRacer already includes a signal inverter on the telemetry/FrSky port, so only requires a simple cable.
So, what do we want to do? We want to invert a Serial signal from the flight controller and connect that inverted signal to the telemetry port of a FrSky radio receiver.
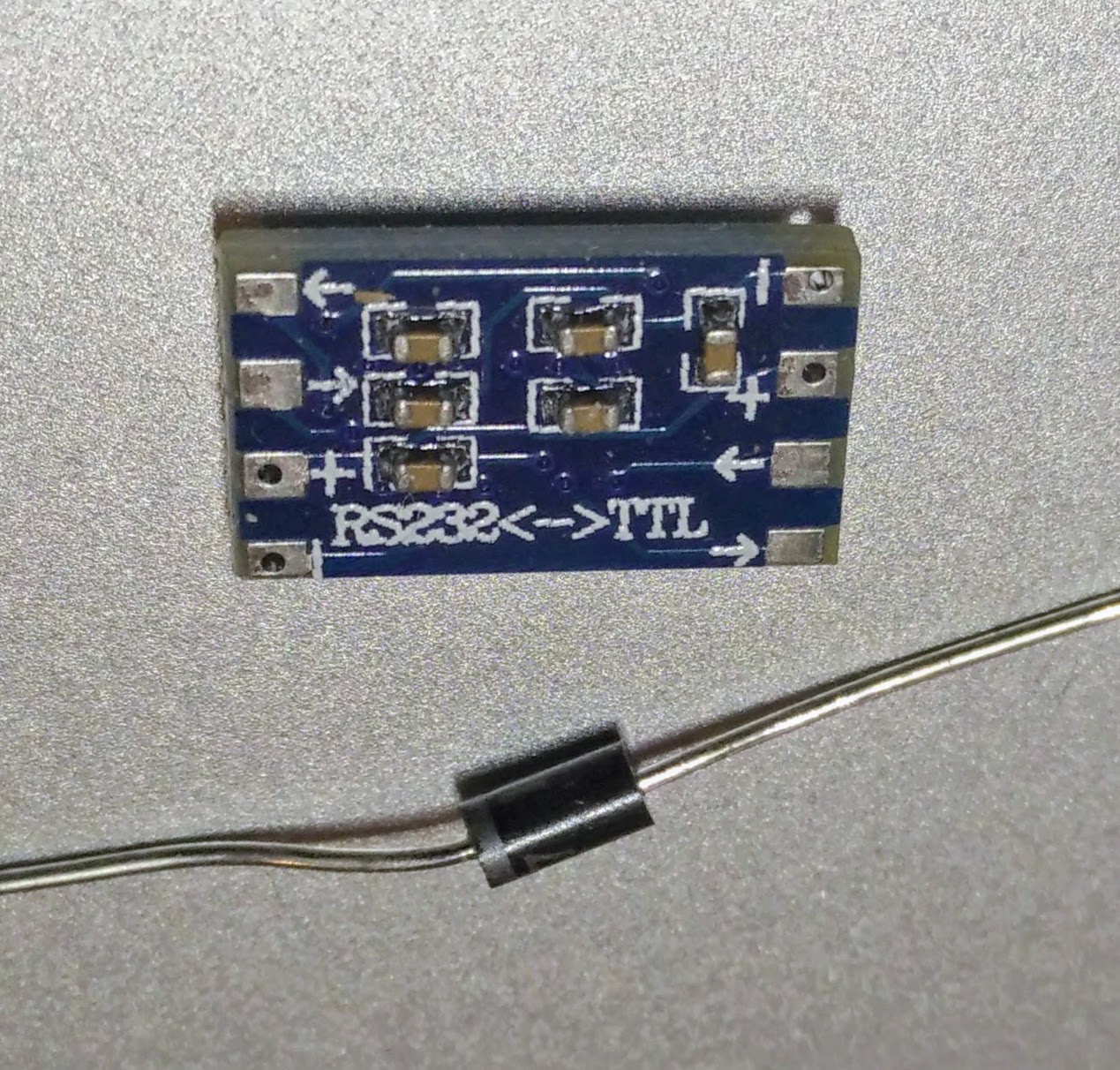
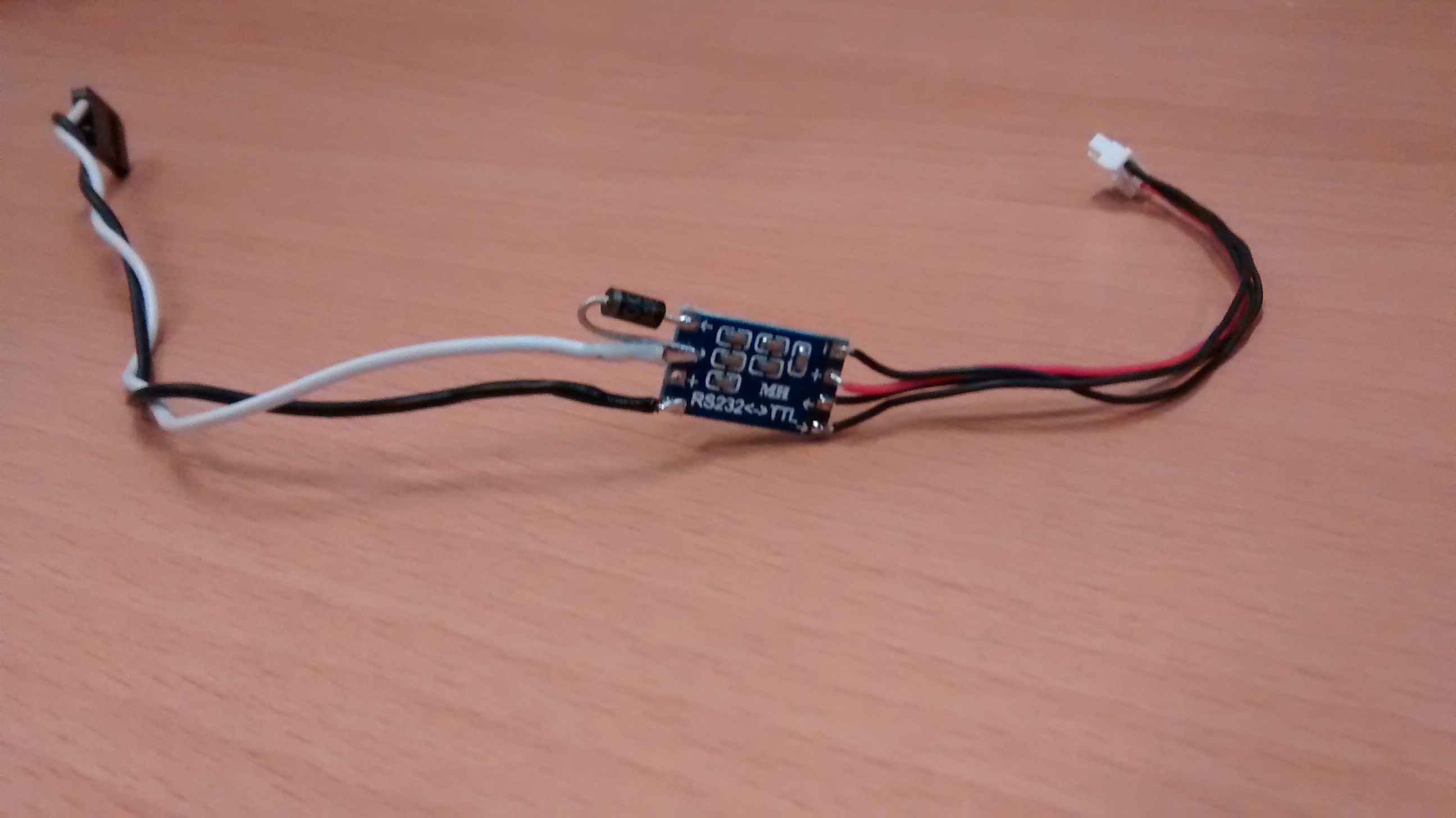
Let’s start with an easy example. A regular PixHawk flight controller, and a X8R radio receiver. For this situation we need the appropriate connectors to use one of the serial ports on the PixHawk (DF13 6 positions) and a regular servo plug to connect on the telemetry port on the X8R. We also need a few additional electronic components. A serial inverter and a small diode. These cost less than 1 USD. I bought mine on ebay.
![IMG_20180404_110135|690x282]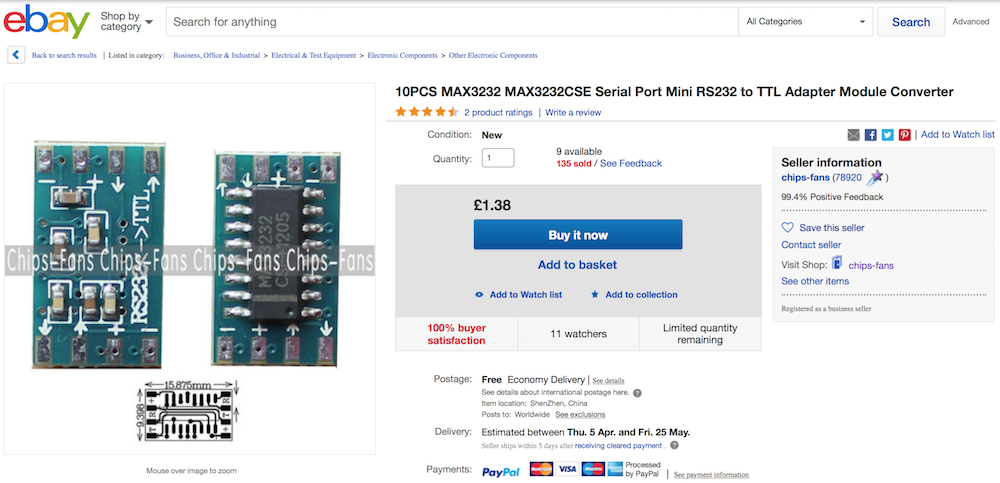
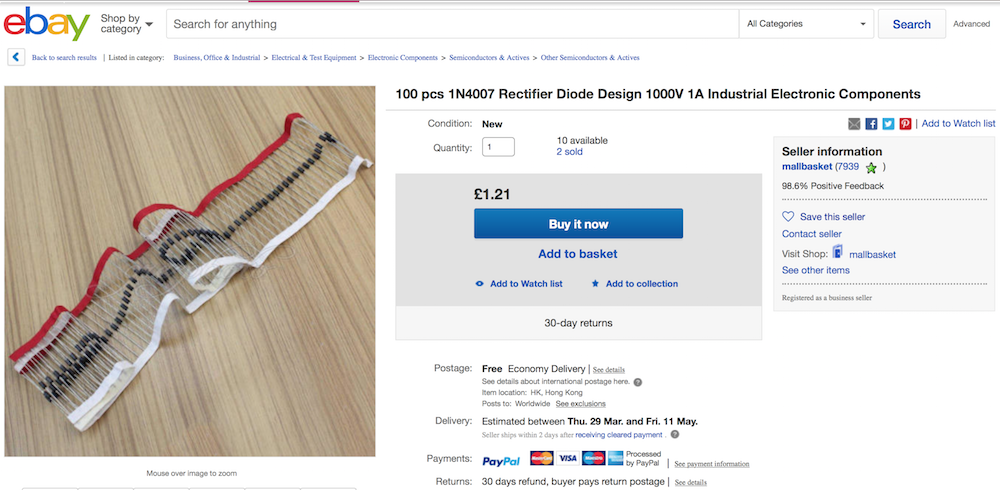
As, you can see, I can build 10 of these for 3.7USD, so parts unit cost so far is 37cents  Let’s add the cost of the plugs and some wire and some heat shrink and our budget of less than 1USD per unit is achieved. Not accounting for labor costs, but, hey… we’re doing this for fun….
Let’s add the cost of the plugs and some wire and some heat shrink and our budget of less than 1USD per unit is achieved. Not accounting for labor costs, but, hey… we’re doing this for fun….
Now that the “slow boat from China” has managed to deliver our parts let’s assemble. This requires some soldering, and the usual recommendations regarding soldering very small parts apply.
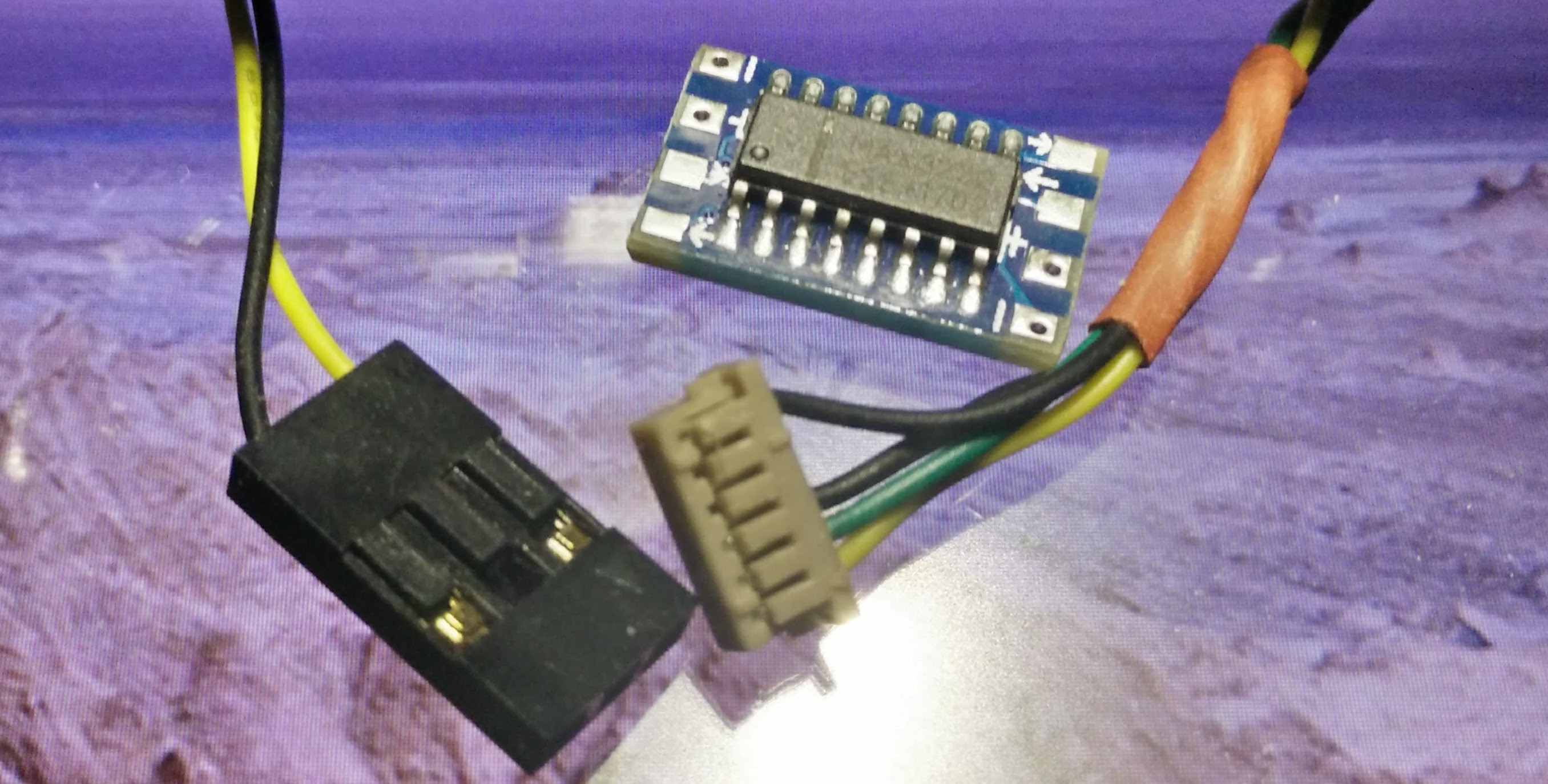
Here you can see the plugs used (the infamous DF13 and the regular servo). Small notes here. The wires on the DF13 are placed for Serial (RX and TX), power and ground, BUT on the servo plug note that we only use the signal and the ground wire
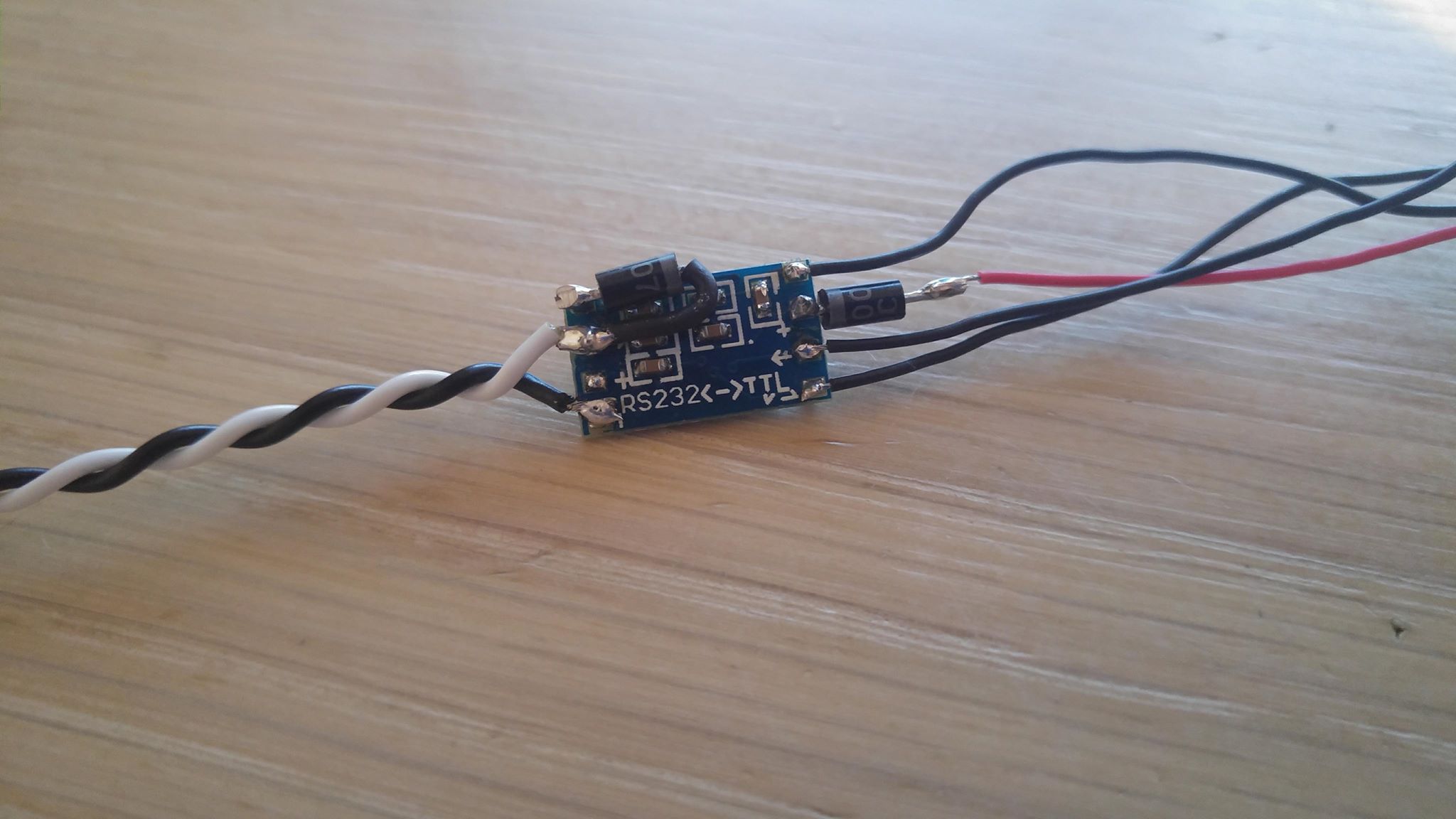
Now we start with some soldering and also how I chose to use the small diode on the back of the small board. (soldering not finished)

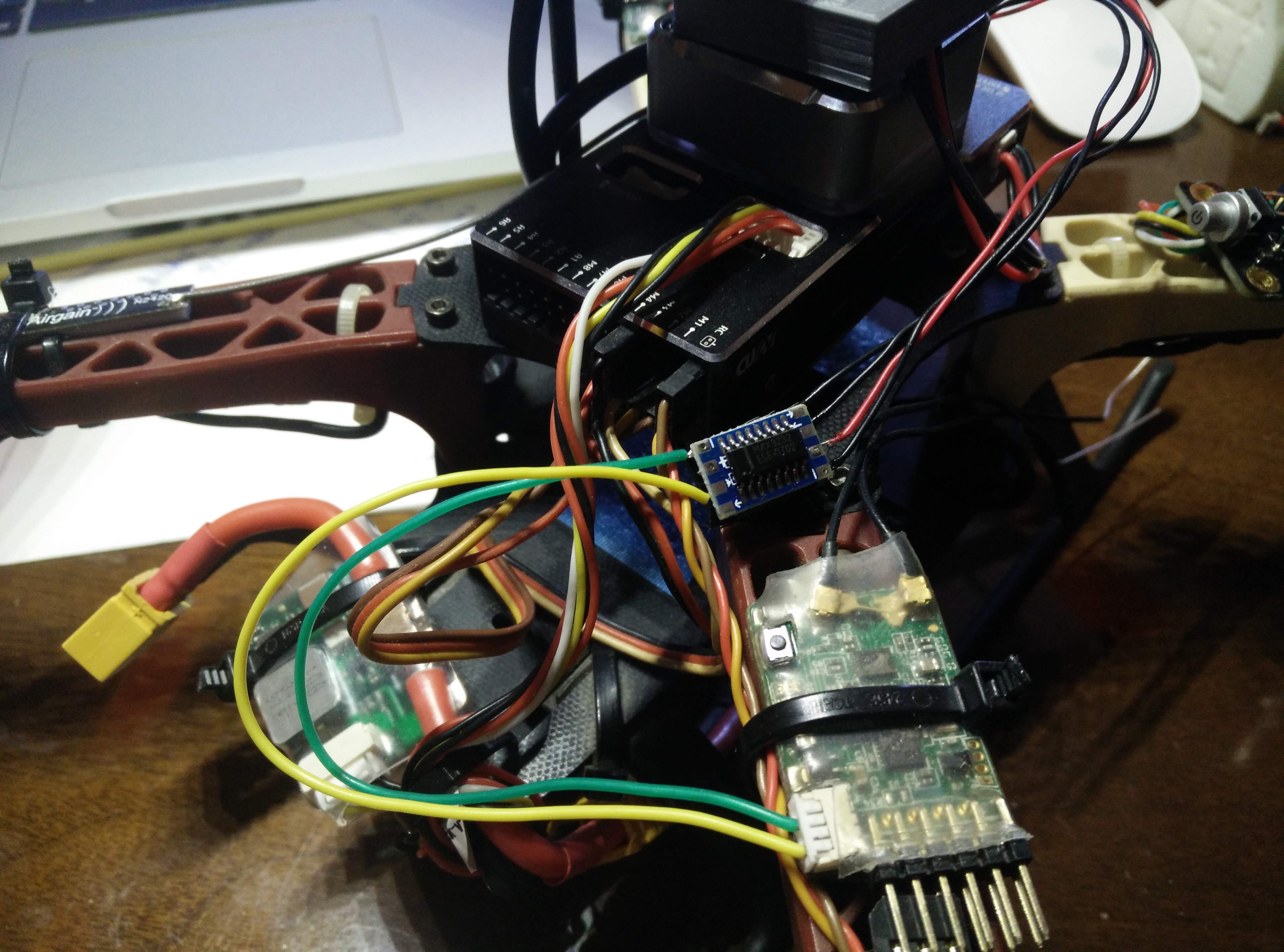
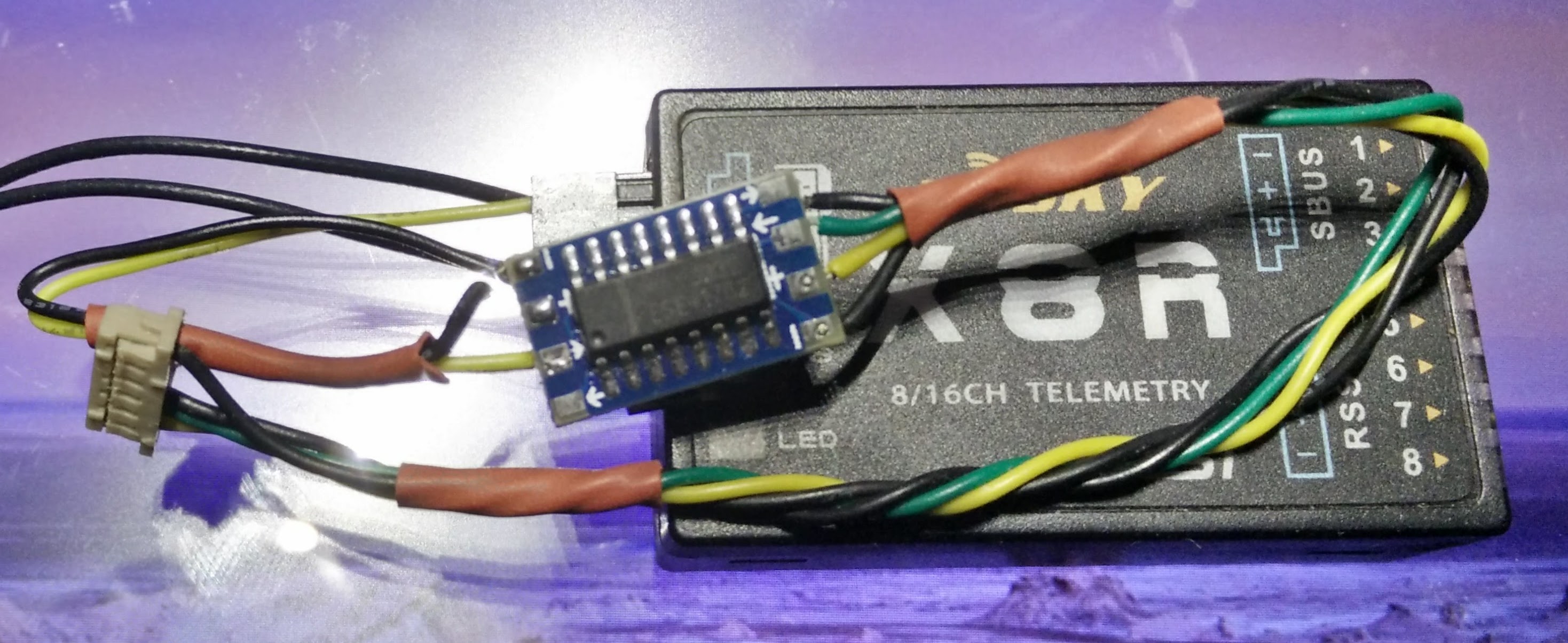
After finishing up all the soldering and “closing” the system with some heat shrink, we can connect to the X8R and to a serial output on the PixHawk (or on Navio2).

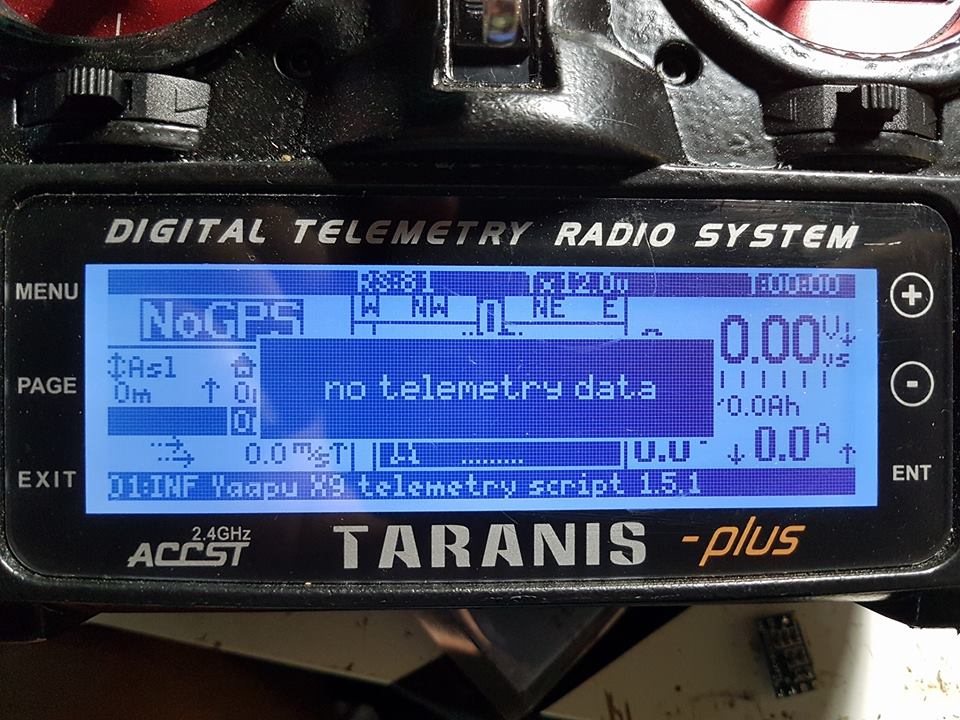
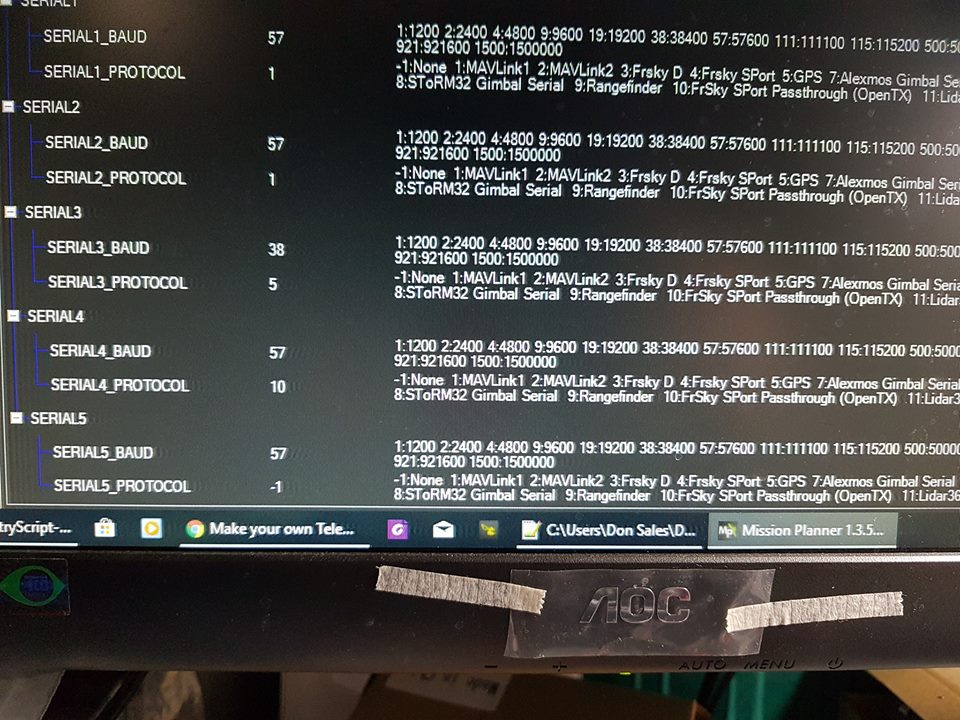
Now setup your serial port to output either FrSky Sport telemetry, or to use the excellent scripts by Alex choose the XPort option, and have fun.

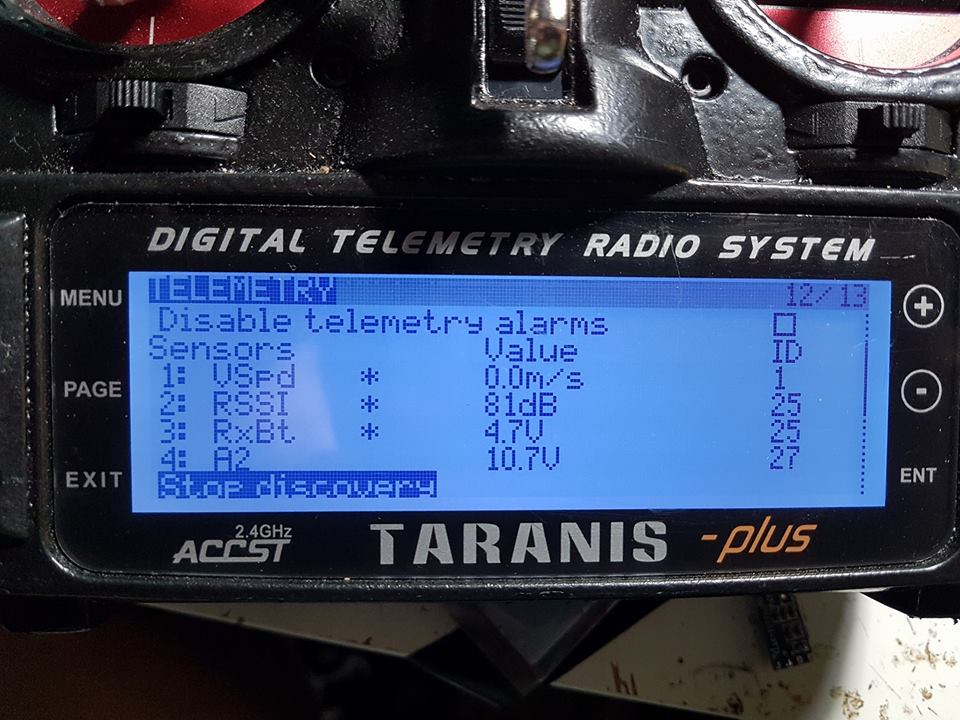


 ) and connected to a X4R receiver
) and connected to a X4R receiver