This project is what I’ve been working on in the last couple months, an open source lua based telemetry script for the Taranis X9D, X9E and QX7 radios, it uses the frsky passthrough protocol and requires opentx 2.2 and a recent release of ardupilot.
The script supports all the telemetry DIY 0x5000 packets sent by ardupilot’s frsky passthrough protocol library.
The project is hosted on github
Screenshots
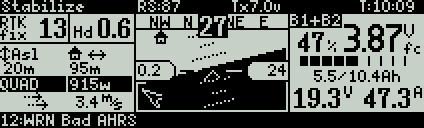
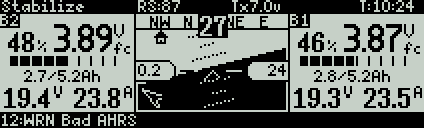
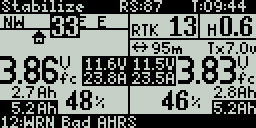
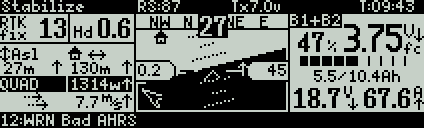
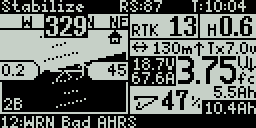
dual battery view
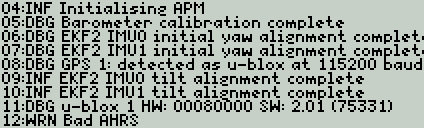
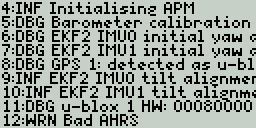
mavlink messages
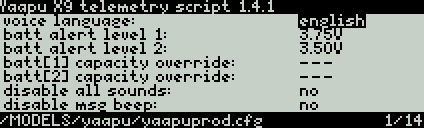
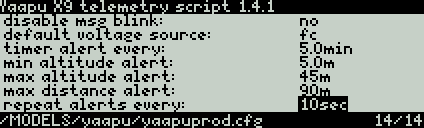
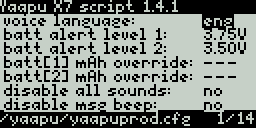
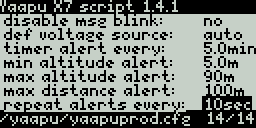
configuration menu
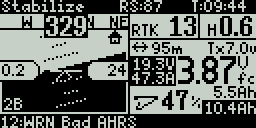
min/max values view
Features
configuration menu, long press [MENU] to display
per model configuration saved in MODELS/yaapu/modelname.cfg
flight mode (modes are displayed based on the frame type:copter,plane or rover)
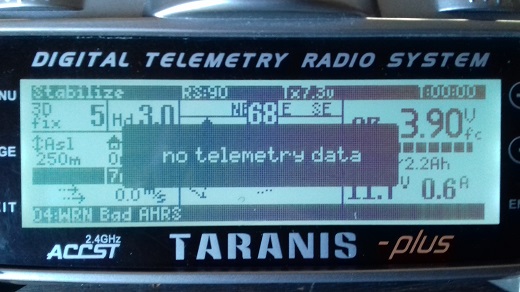
artificial horizon with roll,pitch and yaw with numeric compass heading
mini home icon on yaw compass at home angle position
battery voltage from 3 sources (in order of priority), short pressing [ENTER] cycles between the sources
– frsky FLVSS voltage sensor if available (vs is displayed next to voltage)
– frsky analog port if available (a2 is displayed next to voltage)
– flight controller via telemetry (fc is displayed next to voltage)
battery lowest cell if available or cell average if not
battery current
battery capacity and battery capacity used in mAh and %
power as battery voltage * current
frame type (TRI,QUAD,HEX,OCTA,DODE,WING,VTOL,…)
vertical speed on left side of HUD
altitude on right side of HUD
gps altitude
gps fix extendend status (2D,3D,DGPS,RTK)
gps HDop
flight time
rssi value
transmitter voltage
home distance
horizontal ground speed or airspeed if configured in mission planner
home heading as rotating triangle
mavlink messages with history accessible with +/- buttons short press
english, italian and french sound files for selected events: battery levels, failsafe, flightmodes, alerts and landing
Advanced Features
dual battery support (dual FLVSS and/or dual battery from ArduPilot) short press [ENTER] to display second battery info. If a second battery is detected there will be a “B1+B2” label on screen.
capacity override for battery 1 and 2
min/max for battery/cell voltage, current, altitude, ground and vertical speed, short press [MENU] to display min/max values
vocal alerts for battery levels, max distance and min/max altitude (vocal fence)
configurable vocal timer alert every n minutes
sensors VFAS,CURR,Alt,VSpd,GAlt,Hdg,GSpd,Fuel,Tmp1,Tmp2 are exposed to OpenTX
I utilize this script for more than two months now without any problems. Improvements on each version, this is the perfect solution for my Q X7, thanks for the good job Alex!
im not so good at these things eg computer programes I run crossfire and get most things on my screen now but would love this is there an easy way to download it,thank you for your hard work,Marty
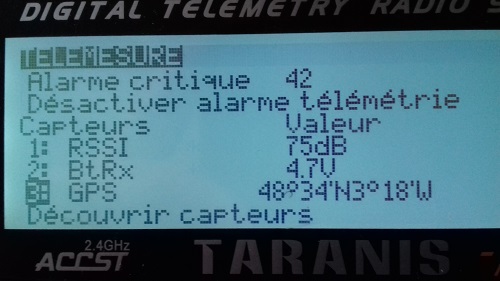
Hi, please check if you are getting the sensor value “RxBt” which is the rx voltage in your model telemetry page, I use it to check for valid telemetry
ok, easy fix, the sensor in french is “BtRx” whereas in english and italian is “RxBt”, I’ll fix it by switching to RSSI to detect telemetry, in the meantime please try to rename the variable to RxBt to verify my temp solution
 alex
alex