It is under development and the code is not available yet. The backend is separated from the frontend.
The existing frontend is tkinter but it can easily be replaced with something else
Really happy to see this taking shape. I firmly believe the way forward should be web apps. With proper permissions from the user, the browser can do a lot with connected peripheral hardware, and you can offload nearly all tasks to the client browser to keep the server backend pretty light.
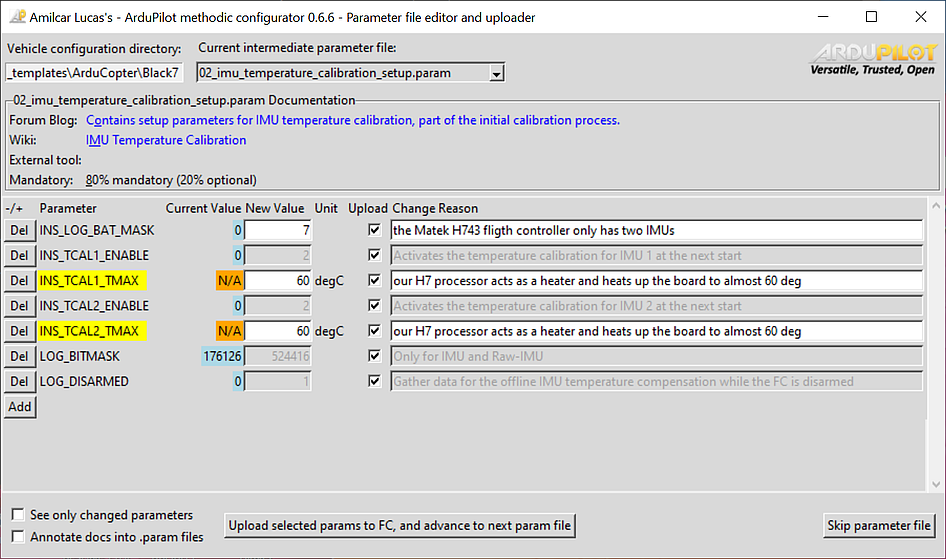
Yes @Yuri_Rage that is the plan. First a python application, then a client side web application with serial/USB permissions and local filesystem access. The application is currently a filesystem backend, a serial communication backend and a tkinter frontend. All currently in python, using SCM concepts, the application is configured using :
an apm.pdef.xml file
a 00_default.param file extracted from a .bin log file
a .JSON file with documentation URL links
the intermediate parameter files contained in the Blog post
@amilcarlucas
I was going to install the configurator you made but have ran into this error on windows 11
“C:\Users\XXX\Documents\MethodicConfigurator>pip install ardupilot_methodic_configurator
ERROR: Could not find a version that satisfies the requirement ardupilot_methodic_configurator (from versions: none)
ERROR: No matching distribution found for ardupilot_methodic_configurator”
I am not entirely sure how to proceed, do you have any clues?
Thank you for this Amilcarlucas will download later or first thing in morning my half a brain cell will be overloaded and blow the main fuse or maybe I should dilute said half a cell with some of the magic Scotch Whisky only jesting
following the new instructions I get the following error on windows 11:
C:\Users\xx\Documents\MethodicConfigurator>python3 ardupilot_methodic_configurator.py
Traceback (most recent call last):
File “C:\Users\xx\Documents\MethodicConfigurator\ardupilot_methodic_configurator.py”, line 24, in
from backend_flightcontroller import FlightController
File “C:\Users\xx\Documents\MethodicConfigurator\backend_flightcontroller.py”, line 82, in
class FlightController:
File “C:\Users\xx\Documents\MethodicConfigurator\backend_flightcontroller.py”, line 165, in FlightController
def create_connection_with_retry(self, progress_callback, retries: int = 3, timeout: int = 5) → mavutil.mavlink_connection:
NameError: name ‘mavutil’ is not defined