DO NOT EVER FLY WITH ARMING_CHECK = 0 ! Especially with a heavy cargo vehicle. Arming checks are in place to catch errors that may endanger equipment, property and people, including yourself.
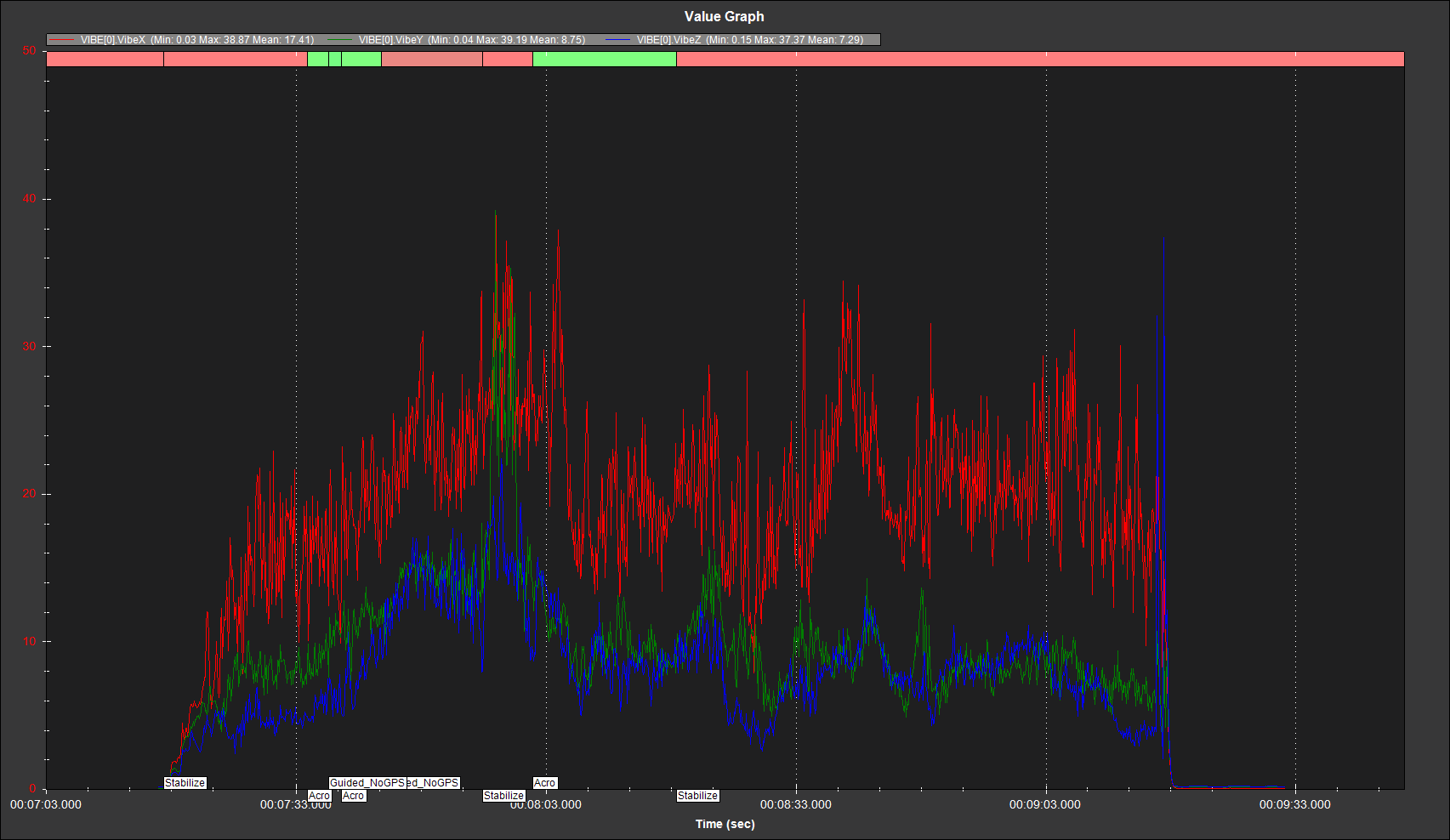
When vibrations are worse after filtering, you did the filters wrong. They can’t stay at the level they’re at. At least you don’t have clipping.
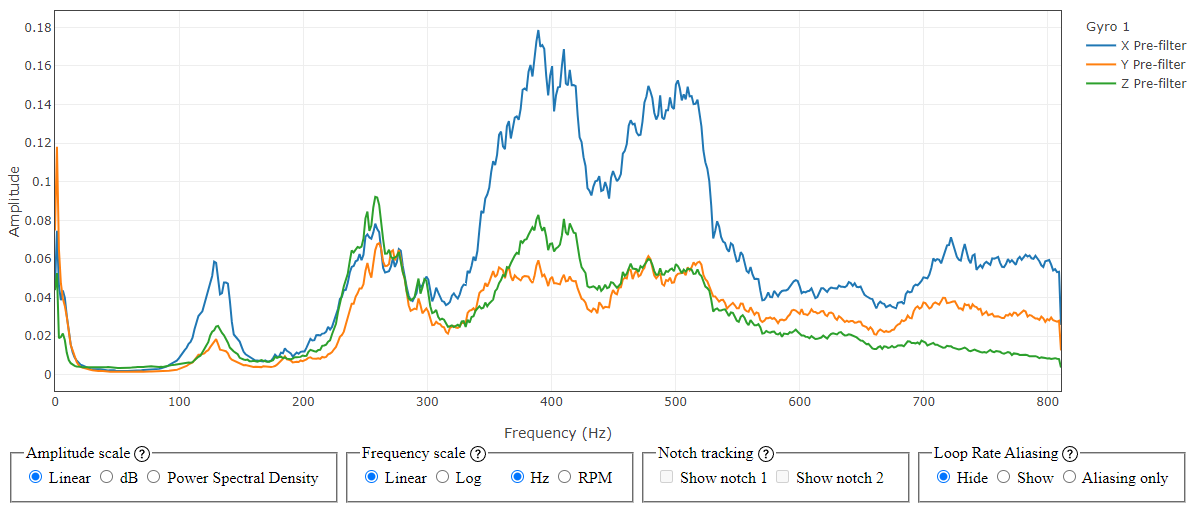
(note that the last graph shows “Linear” scale, not “dB”)
Also some more stuff I found:
- ArduPilot Hardware Report doesn’t show a compass, do you have no compass?
- You are missing IMU temperature calibration.
- Your battery monitoring has the arm, low and critical values for a 5 cell LiPo, while the voltage in your logging says 6 cell LiPo. Also you didn’t set any battery failsafes.
- Your MOT_THST_EXPO value is that for a 10" drone. Do you have a 10" cargo drone?
- You didn’t set PSC_ACCZ_I and PSC_ACCZ_P according to MOT_THST_HOVER and ATC_THR_MIX_MAN is also still default.
I stopped looking after that…
I recommend to read and follow the How to methodically tune (almost) any multicopter guide. Download the methodic configurator, follow each step in the configurator and edit the parameters and “param changed reason” to suit your copter. Upload them to the FC one by one as you read along. The guide and configurator tell you what to do at any given time. Do not skip any steps! Anything that might seem like a shortcut will result in more work and/or a worse tuned copter in the end.