I will give it a read…
I haven’t tuned any filters, currently I can’t see that filters would cause the issue that I am seeing.
I am definitely willing to be wrong. Have you see in the bin file that it would help?
Just trying to rule out hardware issues first, do you have a different 4 props to test with? I’ve had bad props that looked perfectly fine but were bent at some point which made them slightly more floppy, resulting in similar symptoms.
Dave I have read where you have helped lots of people with tuning and would ask if you would be so kind to maybe help me?
Just to clarify, the quad seems responsive but not twitchy, but between motors 1&2 there is this wobble that happens when I give pitch input and sometimes it seems random. The random may be a wind influence cause it. Other than the 1&2 motor bouncing it seems pretty solid. I didn’t really want to autotune because I don’t feel that I am at that point yet and when I click autotune it say the quad isn’t level.
Sometimes, some vehicles work fine without any tuning.
This is not the case for your vehicle.
There is no such thing as a magic bullet parameter that magically fixes it all.
You do need to read some documentation and fix one parameter after the other to get the vehicle to run.
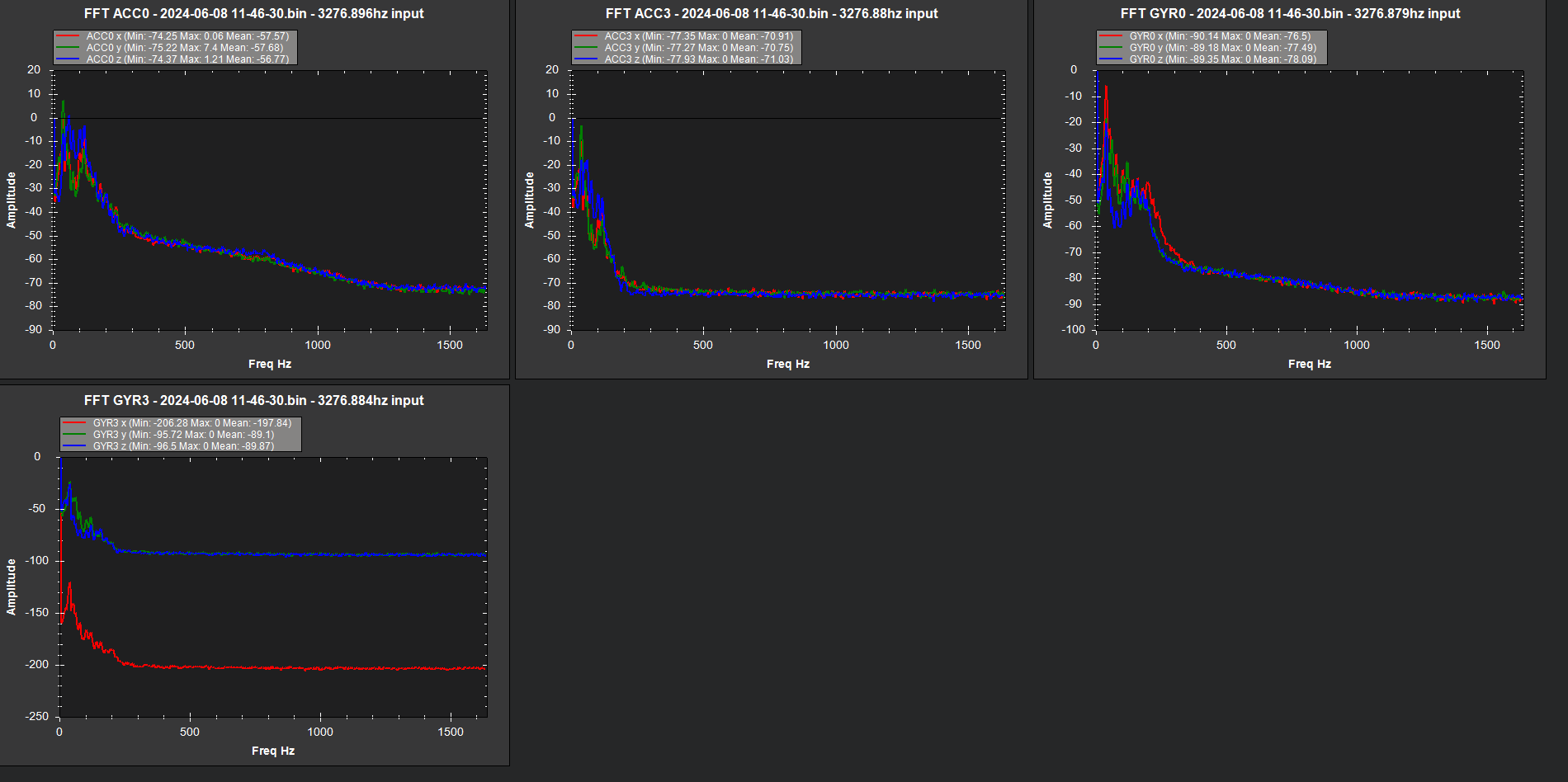
Here is the first sample flight to start the notch filter process. Any feedback would be greatly appreciated.
Side note, it flew amazing this time. I did adjust the yaw parameters a touch and wow the wobble is gone and its solid.
Last night I went back over the frame and noticed that 2 of the motors were ever so slightly tilted, fixed that.
@amilcarlucas@dkemxr@Tristan_Redish@Oli1 I really appreciate the time you took out of your day to look at my situation and assist me with getting my quad up and solid.