Congratulations to community member Yaapu (Alex) for winning Ardupilot’s “Best Contribution of the Month” award for February 2018, for his work on an open source Frsky telemetry script for the Taranis X9D,X9E and QX7 radios.
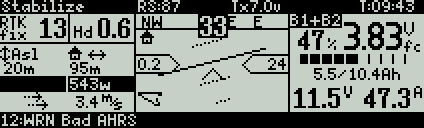
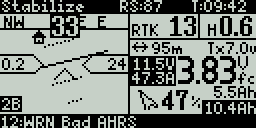
Hosted on Github, Alex’s Lua script runs on OpenTX and includes a slew of features, including advanced functionality like dual battery support and vocal fence with max distance and min/max altitude alerts. It supports Ardupilot’s 19 Copter and 20 Plane flight modes, along with Rover’s 9 driving modes.
The prize for the month was $200 for the top contributor. Thanks to those who donated to ArduPilot, including our Corporate Partners. If you are a company and wish to donate a prize for an upcoming month, please email the partners email list (partners@ardupilot.org).
Bravo, this is a huge win for the community! I’ve been using the venerable teensy solution up to now, but will definitely give this a try instead.
Props also to Craft & Theory who put in a lot of work to support the underlying telemetry code in Ardupilot and work out the protocol. Great for the wider community that there is now fully opensource and supported commercial options.
Congratulations ! Very well executed work.
I know that beggars can’t be choosers, so I just hope that this will be eventually ported to Horus radios as well.
Has anyone tried to send Passthrough telemetry through a transparent serial link like Dragonlink V3 in Radio Modem Mode? Have these been made to work with anything other than a FrSky Tx?
I haven’t tried this specific script yet, but for sure Mavlink telemetry works over the Dragonlink radio modem. I would recommend the large receiver for its higher output. I’ve used a micro, but the 100mW telemetry power isn’t well suited for longer range flights with the full Mavlink protocol. The DragonLink TX’s uexp port will feed the telemetry into the transmitter via a pin in the module bay.
But this is not mavlink we are feeding into the Taranis but transparent telemetry protocol that is generated by the FC and fed into the SPort, right? This is not going to work with Mavlink, is it? Unless I do not understand this, which is quite possible.
I’m actually the one that may not understand, because I haven’t yet used this transparent telemetry protocol from the Pixhawk. Instead, I send raw Mavlink across the Dragonlink serial modem and then use a Teensy to convert that to Taranis telemetry. I actually take this a step further and feed that into an XSR receiver which then gets the telemetry back to my transmitter. Perhaps this “transparent telemetry” will work better and with less hardware. I haven’t yet used it.
I am doing what you are doing. Trouble is we only have one serial link with DL v3 and I do not think we can use two telemetry protocols – and obviously we need the mavlink for the GCS.
In theory, the DragonLink could be the RS232 side of the link, since the radio modem is nothing more than a wireless serial link in the first place, and then from the DL TX, the UEXP port could be fed into the TTL converter and so forth as is documented. Except in this case, this would be taking place on the ground instead of in the aircraft. As I said, in theory…I’ll try that this weekend and report my findings.
But, as you said, it’s no replacement for full Mavlink, as much of a hog as that is.
I do not understand! If we are using the Radio Modem mode to transmite un-encoded mavlink, how will we get the TTP from the Pixhawk to the Taranis as well?
Oh, no. You understand just fine. You wouldn’t be able to have both full Mavlink and Transparent Passthrough across the same DL radio-modem link.
Personally, I use full Mavlink for my long range FPV flights with a GCS. This new protocol would be brilliant for times when you aren’t using a GCS.
I can imagine, theoretically again, a scenario where you could maybe simultaneously use the DL radio-modem for Mavlink directly into a GCS and use the second telemetry port of the Pixhawk for transparent passthrough to a FrSky receiver. But this would depend on the Pixhawk being able to deliver both types of telemetry streams at the same time. I just can’t see how this would be truly all that helpful. If you need to use a GCS, then use Mavlink. It’s really that simple.