Winter persists in Upstate NY (and the rest of New England) in March 2018 so I decided to add the new Open Source Frsky Telemetry Script by Alex Yaapu. The LUA script works for newer versions of APM Copter and Plane.
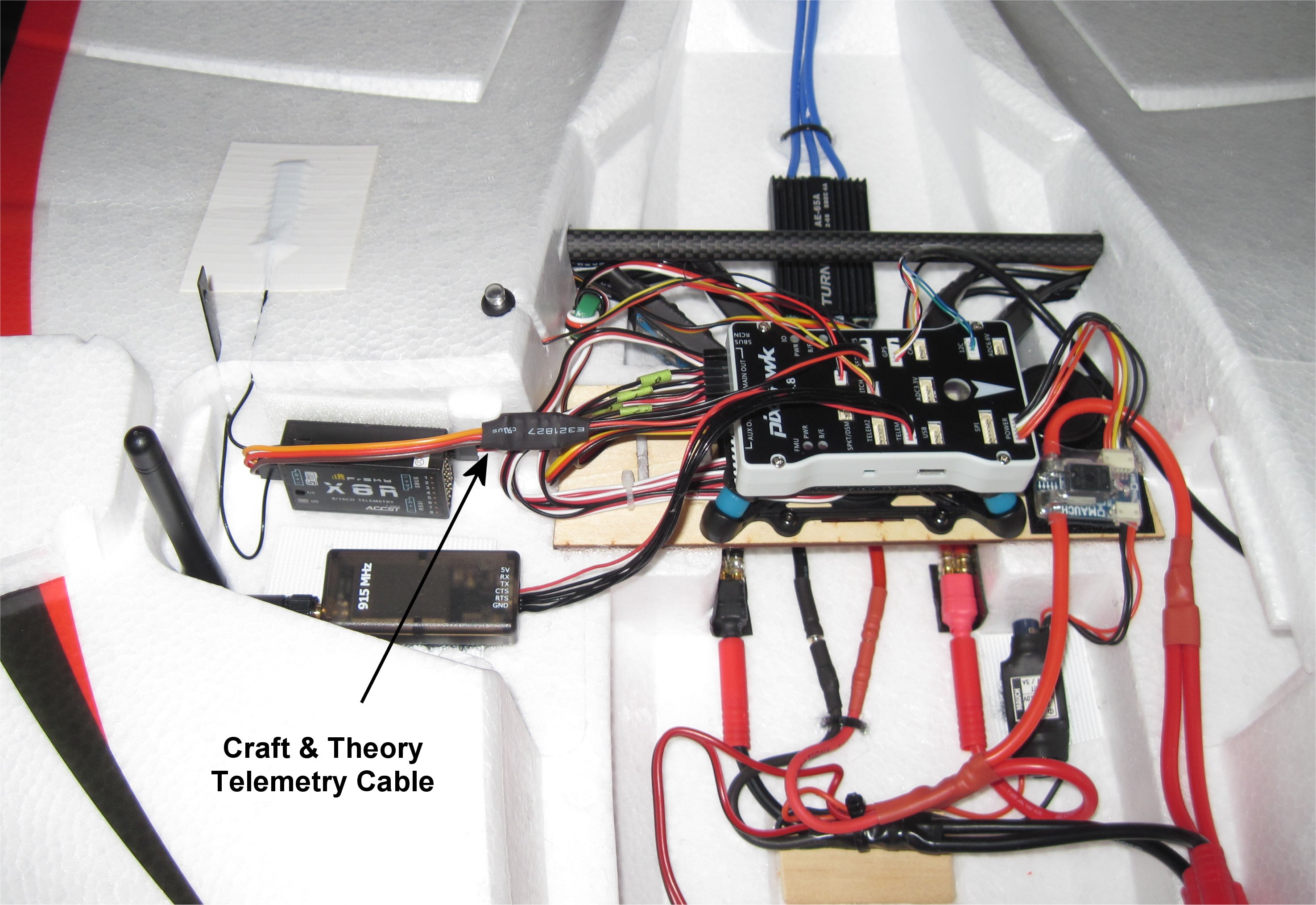
A few prerequisites were needed. Both my Taranis X9D+ radios were upgraded to OpenTX v2.2.1. Using the FrSky Telemetry page in the Wiki, I added the appropriate Craft & Theory cable between the Pixhawk and X8R receiver. Lastly, the Serial 4/5 port needed to be set to protocol 10 for Passthrough.
What a fantastic telemetry script! I can’t wait to try it in flight this summer.