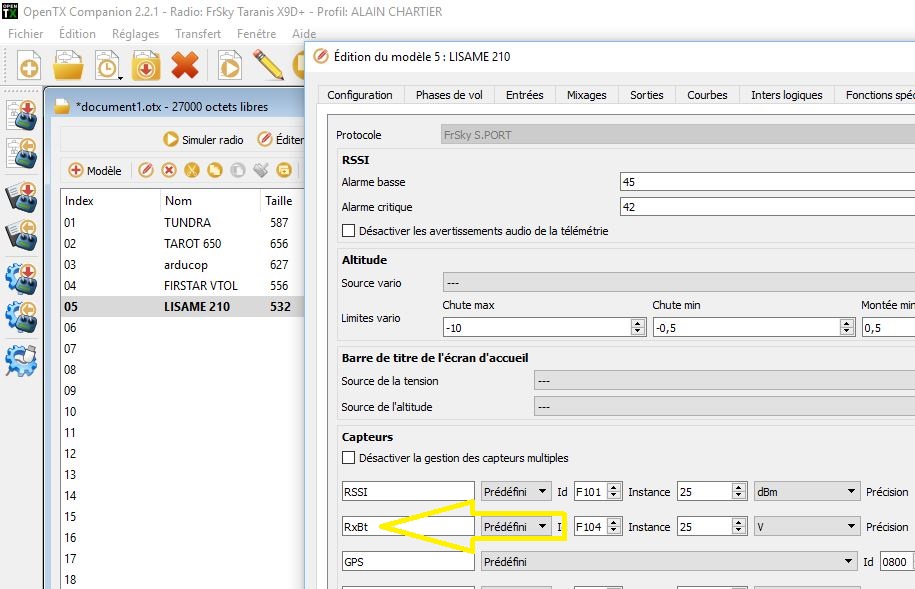
I renamed(reappointed) the sensor ( Bt Rx) in ( Rx Bt) in my Taranis and all work once again thank you
very good news!
now that it works…feedback is welcome 
Hi Alex,
I just saw this blog by chance. What a great job! I am excited to try it out soon.
Can you tell me if the QuadPlane flight modes are supported?
Cheers!
Hi, yes all plane flight modes are supported, take a look at the /SOUNDS/yaapu0/en folder there a sound file for each supported flight mode and if anything is missing let me know and I’ll fix it!
1 Like
Awesome…thank you!
many thanks to @alainlive for providing french sound files.
The config menu now has an option for french language!
Hi Alex,
I had some success today with my initial test of your script. First, I needed to upgrade one of my Taranis X9D+ radios from OpenTX v2.1.9 to v2.2.1. This seemed surprisingly smooth and my models were loaded back in nicely. Next, I added your SD card files using the pre-compiled yaapu9.luac version. For my initial test, I upgraded my Pixracer 250mm quad to Copter v3.5.5 and needed to remember that the FRS port of the Pixracer is on Serial 4 (the FrSky Telemetry section of the Wiki was great for this) and change it to 10 for PassThrough.
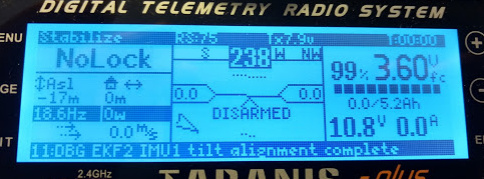
I then re-discovered my telemetry sensors and it worked great! It is so nice to see all the information on the Taranis display without being close to my GCS. I also like the easy configuration screen. It is very convenient!
Next, I will try a QuadPlane setup. Thanks for all your effort!
Hello! Great job. Any chance to use it with an Horus?
Hi Greg,
thanks, I’m very pleased you had success with my script!
I just want to point out that telemetry sensor discovery is not required for the script to work, the sensors you managed to discover are those created by my script: values are read from the passthrough telemetry stream and injected into opentx as sensors conforming to frsky types and names.
This allows for functions and switches in opentx to access sensors that otherwise would be unreachable.
Looking forward to your QuadPlane setup feedback
Hi Franck,
the horus is a whole different beast, this script won’t work with it, a major rewrite would be needed!
Hi Alex,
Great work. I was going to ask if you would consider exposing VSpeed to OpenTx for variometer output but then I saw it’s already done, great!
I tested it today and there seems to be a lot of lag compared to using the frsky vario. Do you know where this originates - maybe ArduPlane does more filtering?
Thanks again, Sam
Hi Sam,
the ardupilot library sends vSpeed updates every 500 millis, so you should expect at least a half a second delay, is this in line with what you experience?
this is the code the “waits” the 500 millis before sending a new vel and yaw message
if ((now - _passthrough.velandyaw_timer) >= 500) {
send_uint32(DIY_FIRST_ID+5, calc_velandyaw());
_passthrough.velandyaw_timer = AP_HAL::millis();
return;
}
Thanks for the info.
Hi Alex,
I did not time it but it seemed like more than 500ms. The HUD update is very fast. I think I will try modifying that line of code to see if I can reduce the latency.
Many thanks, Sam
Hi, that line of code is not my code is ardupilot’s code, no easy way to modify it unless you compile your own arduplane binary, also beware that you could end up changing the frsky protocol timing!
I’m sending vspeed value to opentx as soon as I get it from telemetry, I’ll try to time it to see the actual rate.
Do you have a real vario sensor chained on sport?
Hi Alex, yes that’s what I thought, I’m happy to change it and see what happens. No, I have flown with an frsky vario but I have removed it now that I have passthrough telemetry configured.
ok, report back your findings then!
this is the relevant file
Hi @Samuel_Tabor I did time the script:
I read passthrough telemetry at 60Hz and set VSpd at around 18Hz ,every 55ms
opentx statistics report 53ms as lua timing in line with my findings.
the lag you experience with VSpd does not appear to come from the script, let me know if I can help more
Hi Alex,
Both my Taranis X9D+ radios have been upgraded to OpenTX v2.2.1 without issue.
Your LUA telemetry seems to work fine on Plane v3.8.3 and my QuadPlane setup. I like your script sensor technique as well. Bravo!
1 Like