I was hoping that others were building a Freeman and could post their photos. While I wait for my front motors to arrive, I started to install some components in the fuselage. I ordered my two Sunnysky X Series X3520 520kv Brushless Motors from Buddy RC.
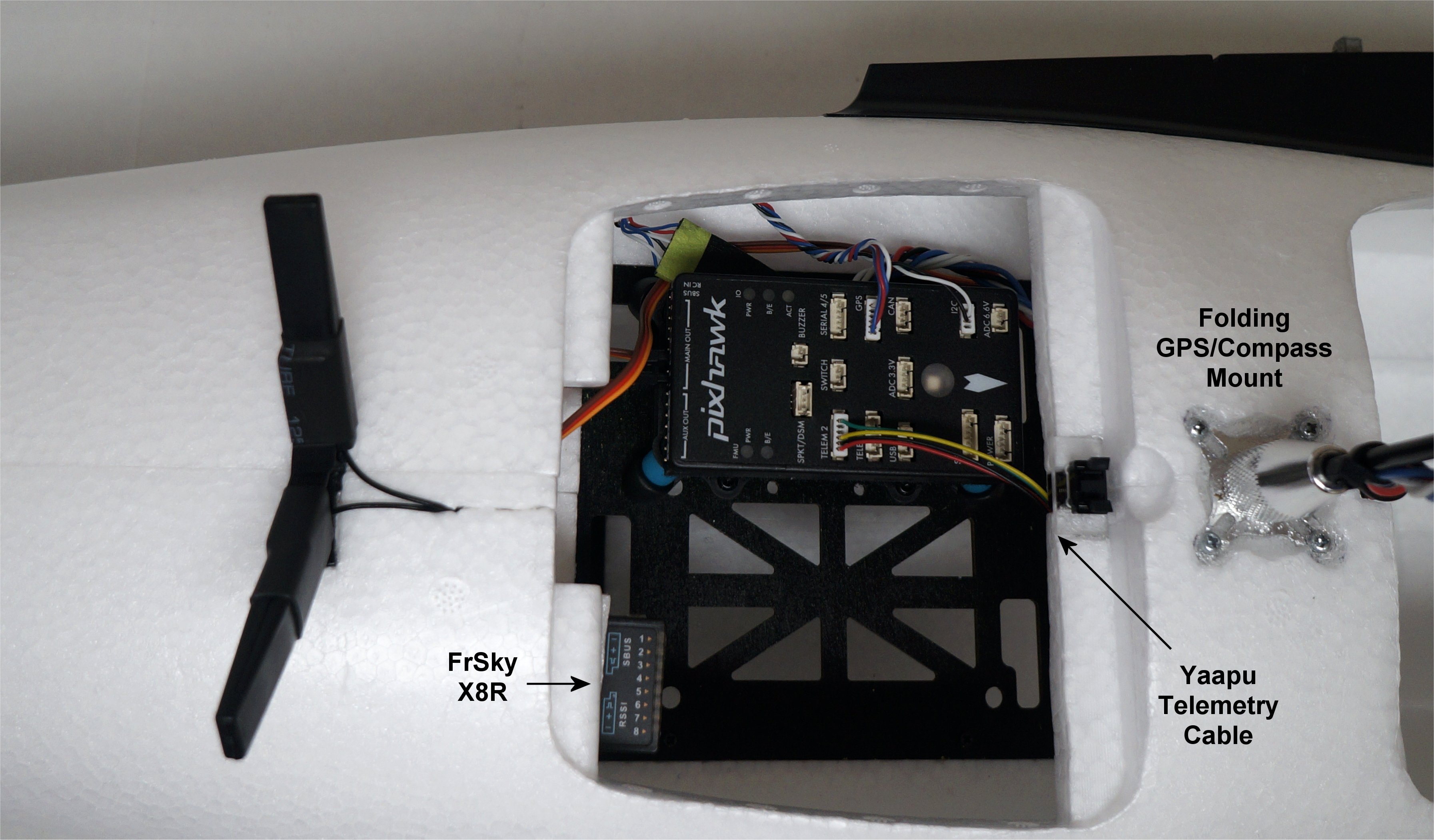
It is always fun to plug the first item into the Pixhawk, which in my case was the v-tail servos on Outputs 2 and 4. I also added a FrSky X8R receiver, Yaapu telemetry cable between the S.PORT and Telem2 port, and a folding compass mast. The exposed X8R outputs are for camera controls.
Details on the Yaapu telemetry script can be found here and here. My M8N GPS module is a high quality design originally from the CSG Shop in Latvia. It has the compass on the bottom side. Today, the company is known as the GNSS OEM Store. I decided to keep the folding mast on for now so it is raised above the FrSky telemetry and video transmitters.