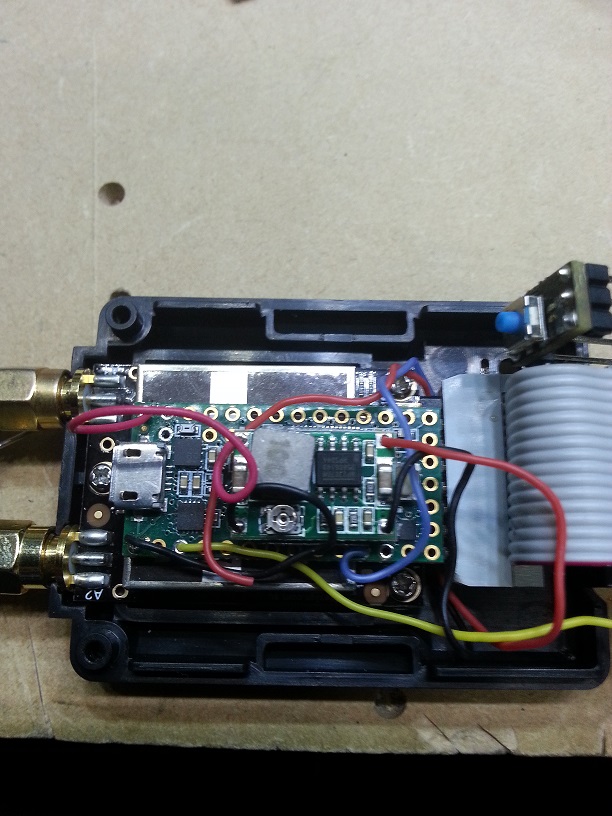
Download and flash Teeensy with By Eric Stockenstrom
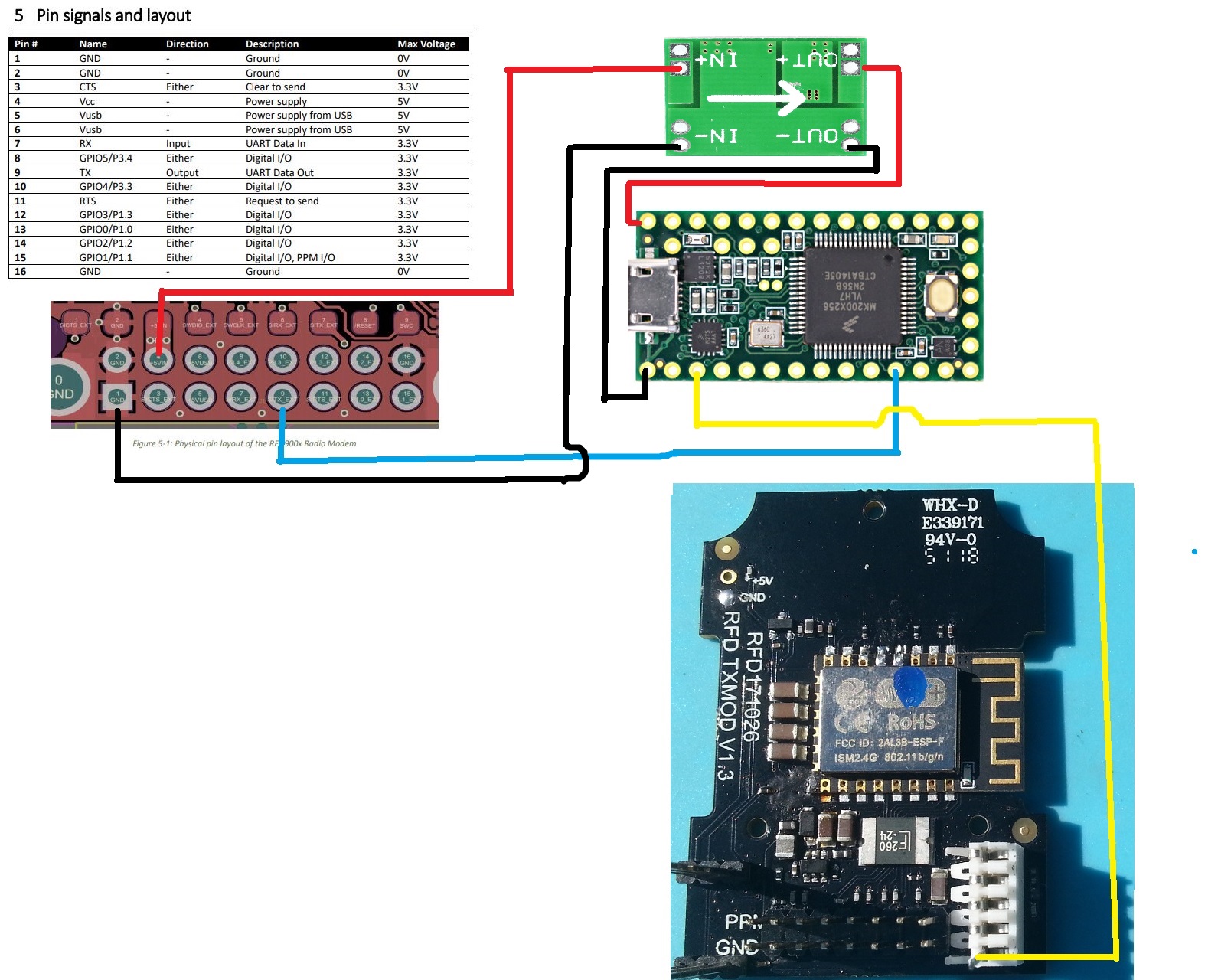
and a DC to DC Buck Step-Down Voltage Regulator to 5V for the teensy above 5v i have found them to stop for no resign at 5.2v and above they say 3.3 to 6v tolerable (ha ha )
Looks like you attached to both TX and RX or the RFD module but then only connected to the RX of the teensey leaving the other wire disconnected, is that right?
Also do you by chance also get a lot of noise on the Taranis speaker with the TX Module attached and active?
well anyone using the TXmod will know it will pulldown your TX battery quick
after an hour flying i had to recharge the TX bit hard the field
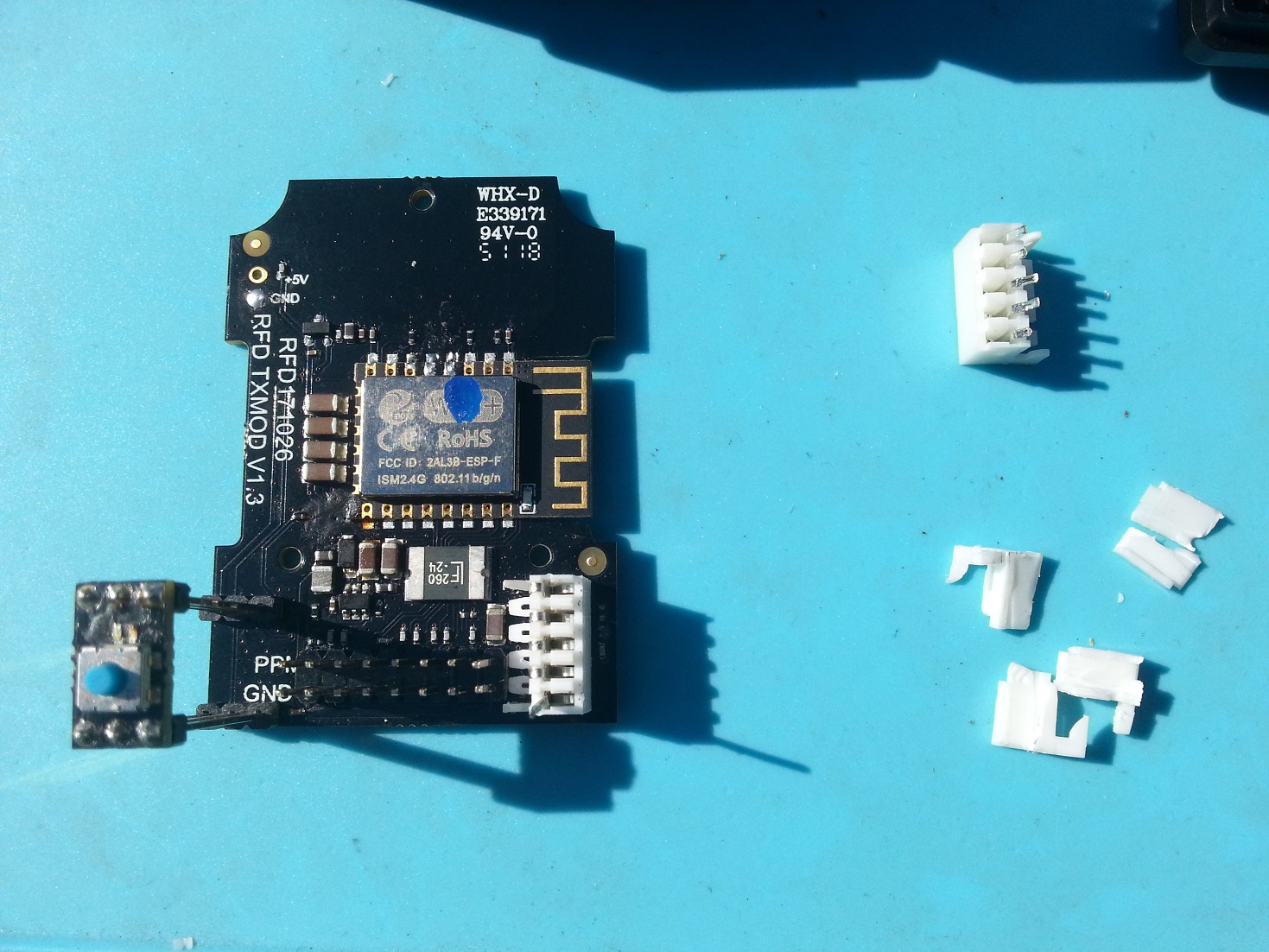
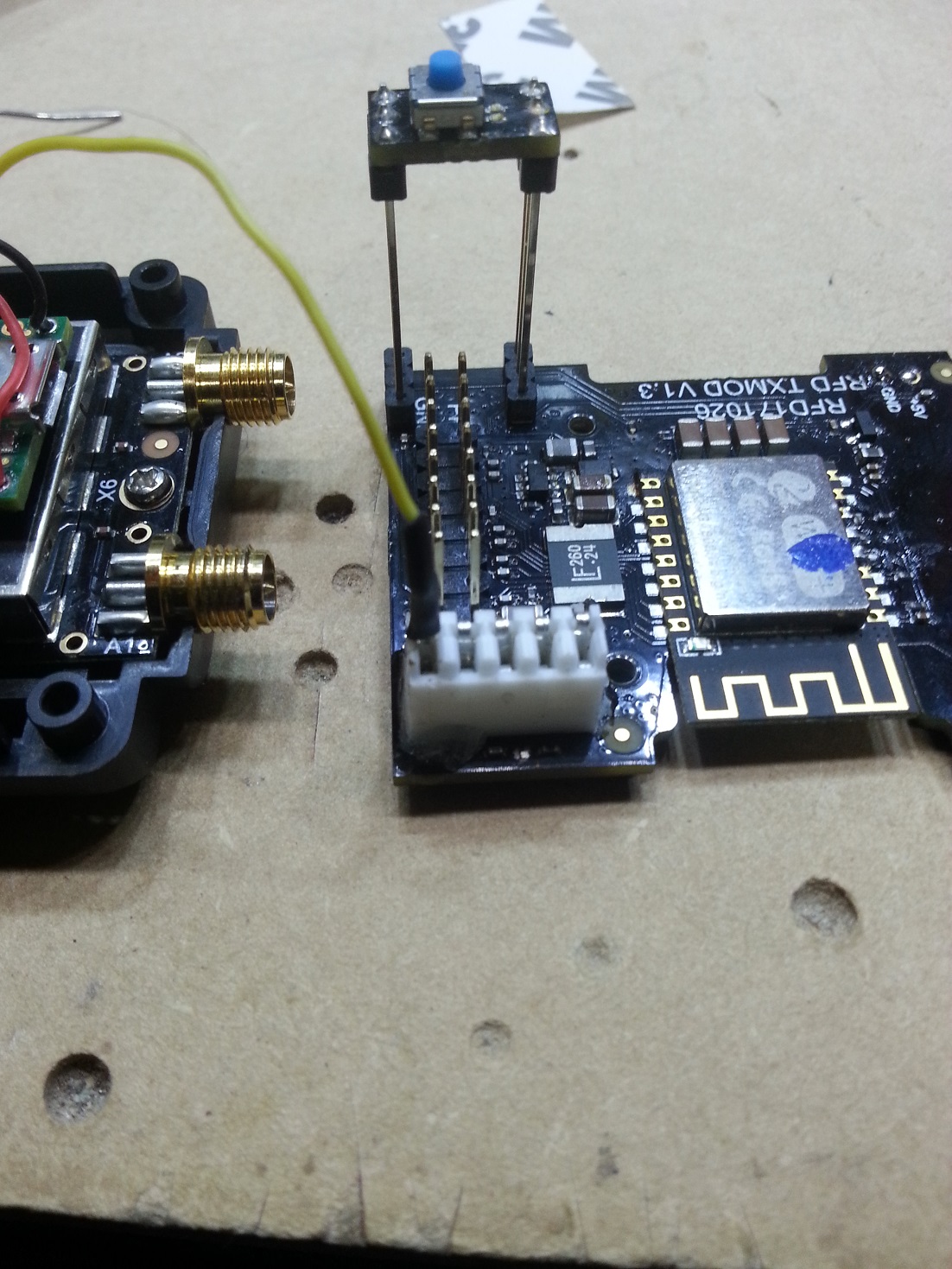
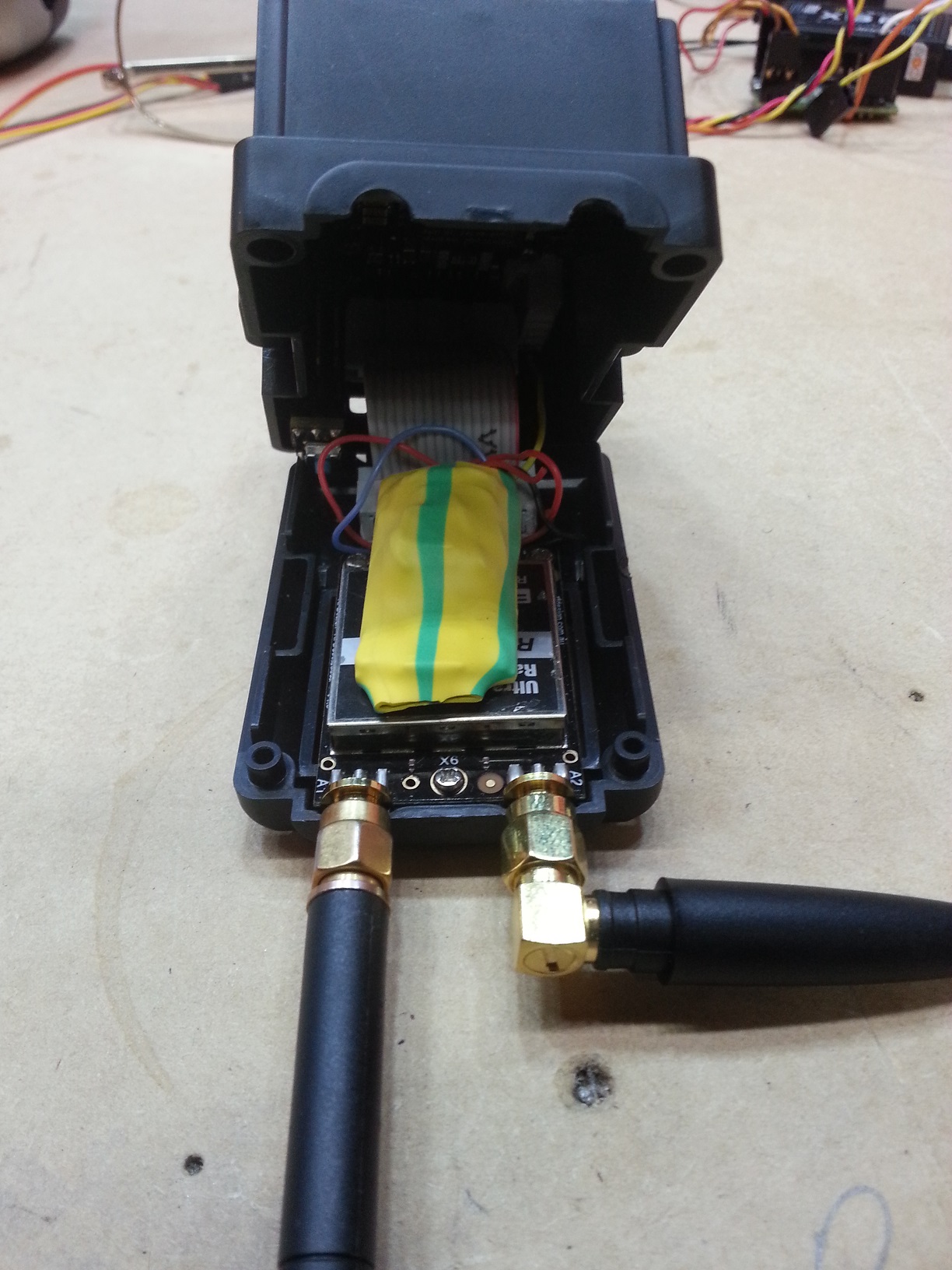
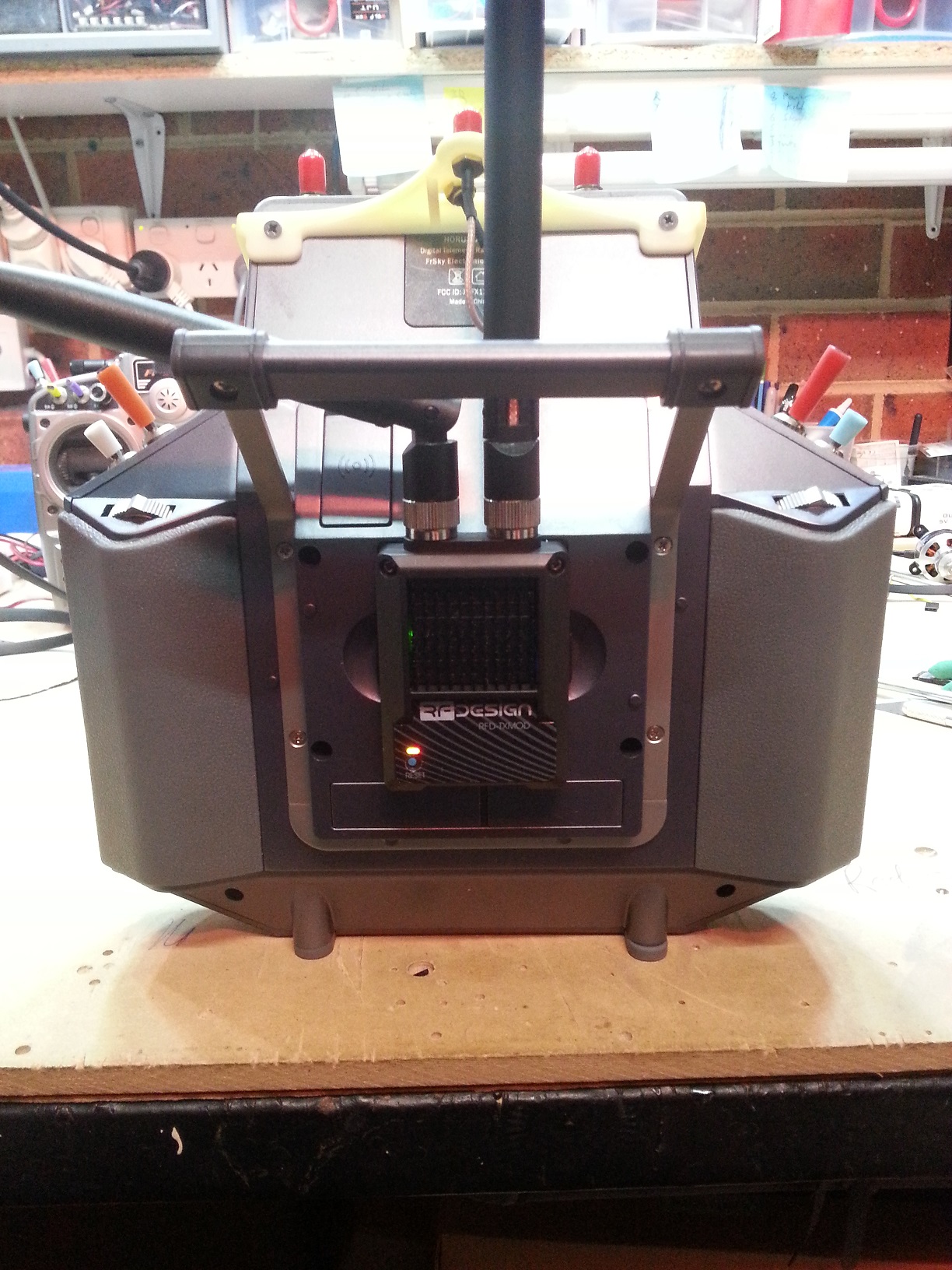
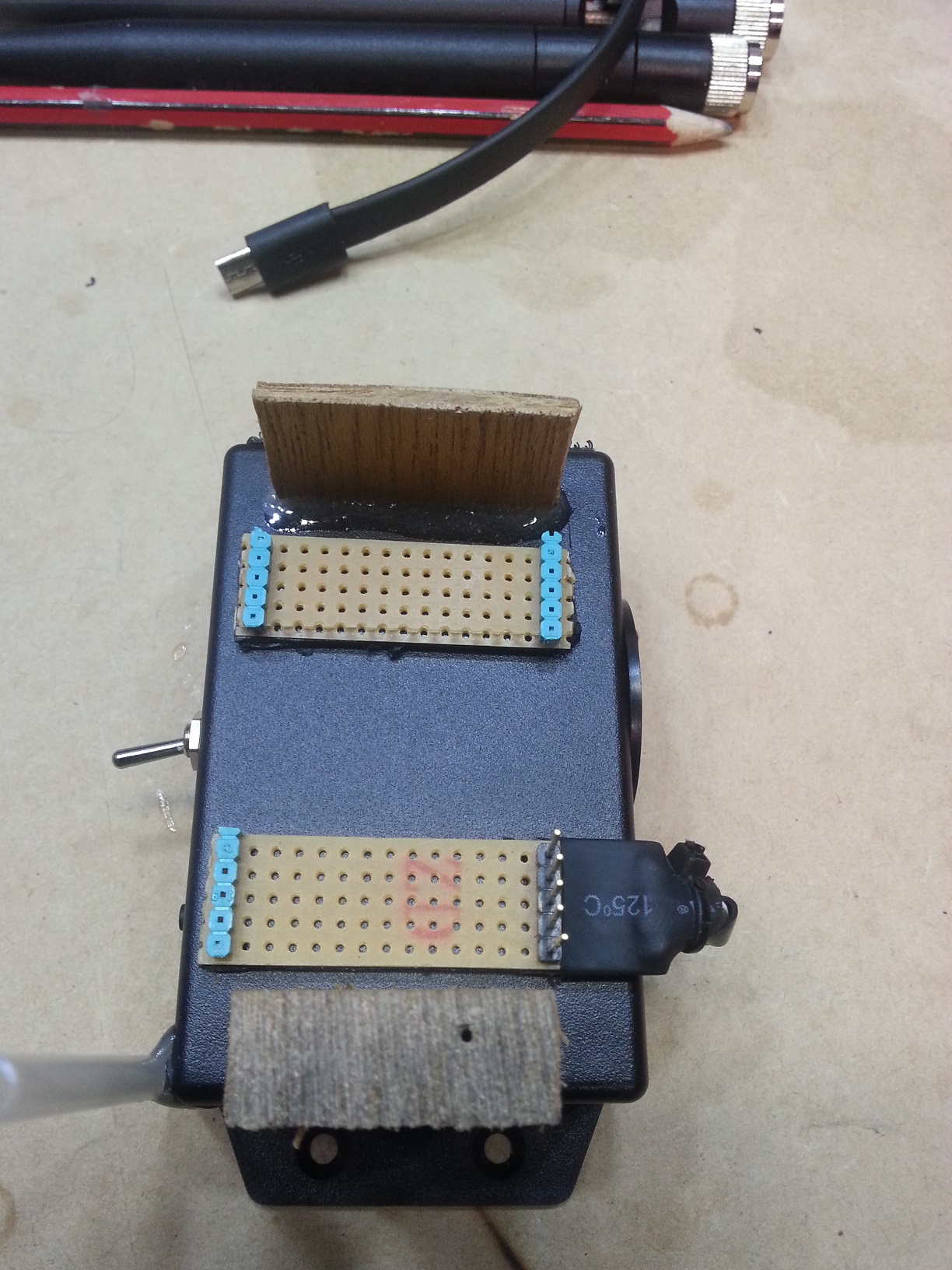
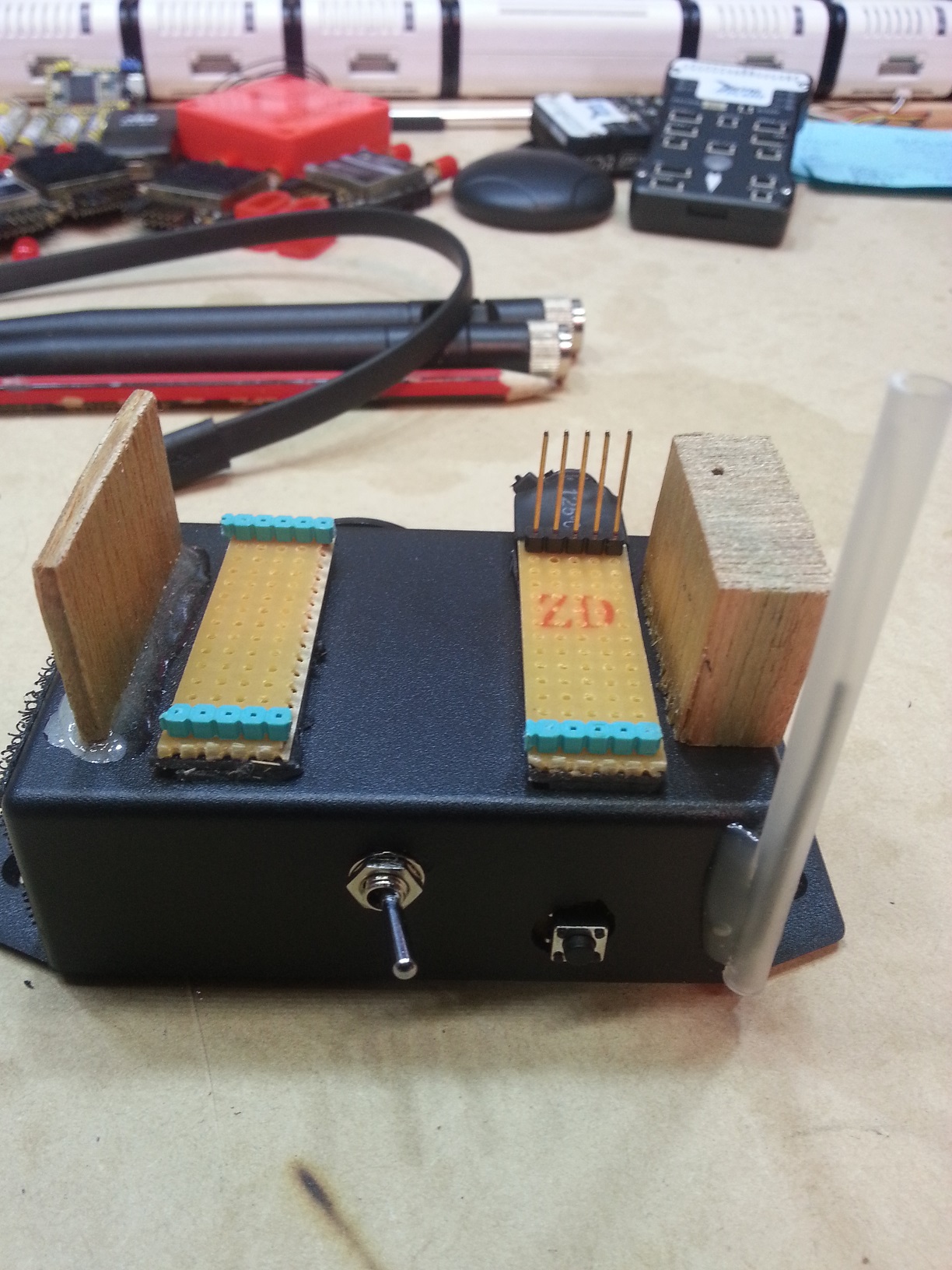
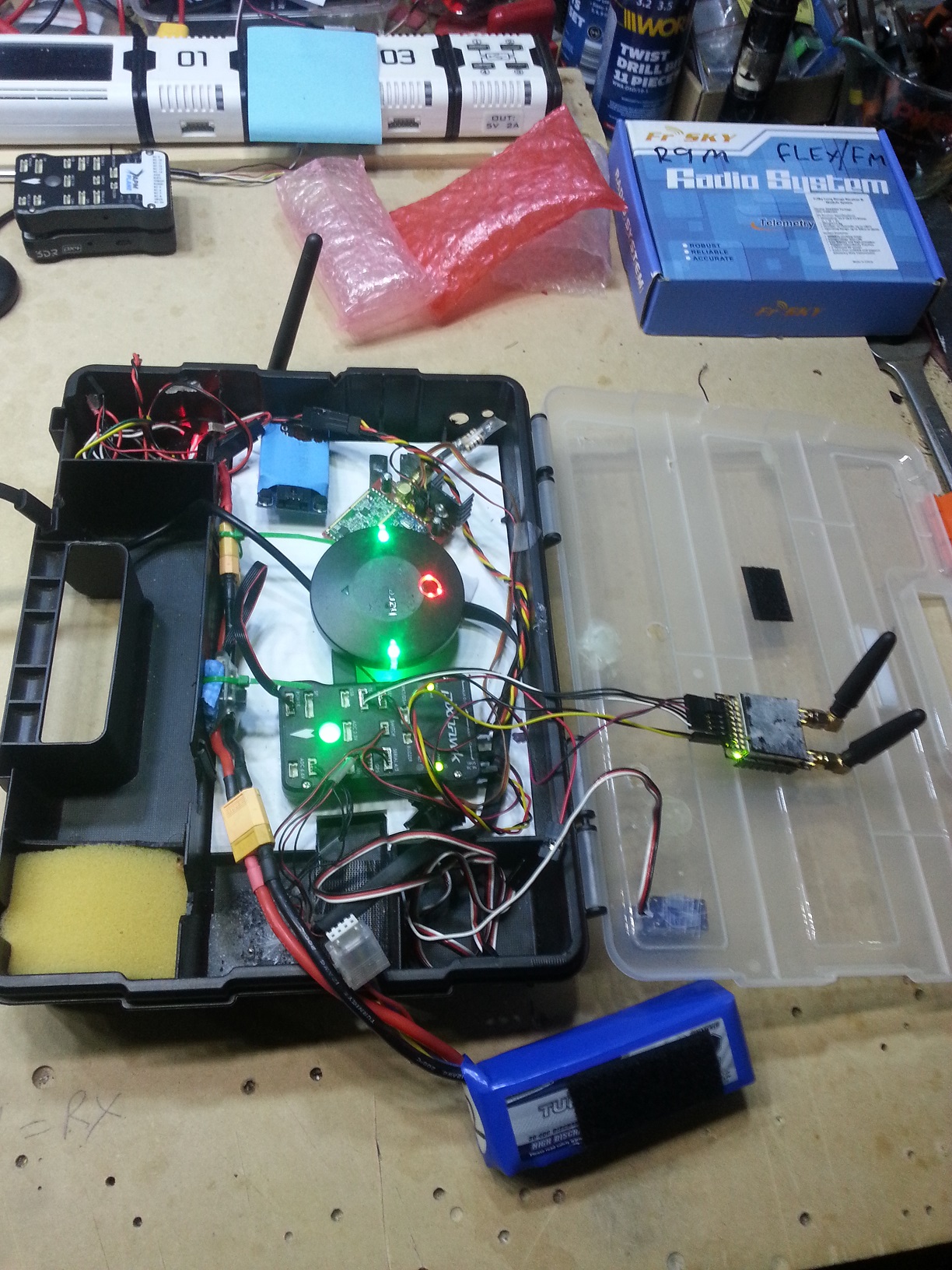
so i made this box an wireless relay box with frsky telemetry for my TXMOD unit for when i do long flights
so now i have a wireless like from my frsky Horus to the TX mod that i can mount it on a tripod
first i got the frsk R-XSR receiver will work up 10v but i will add DC to DC Buck Step-Down Voltage Regulator to 5V the TXMOD will do 18V so its ok on a 4S
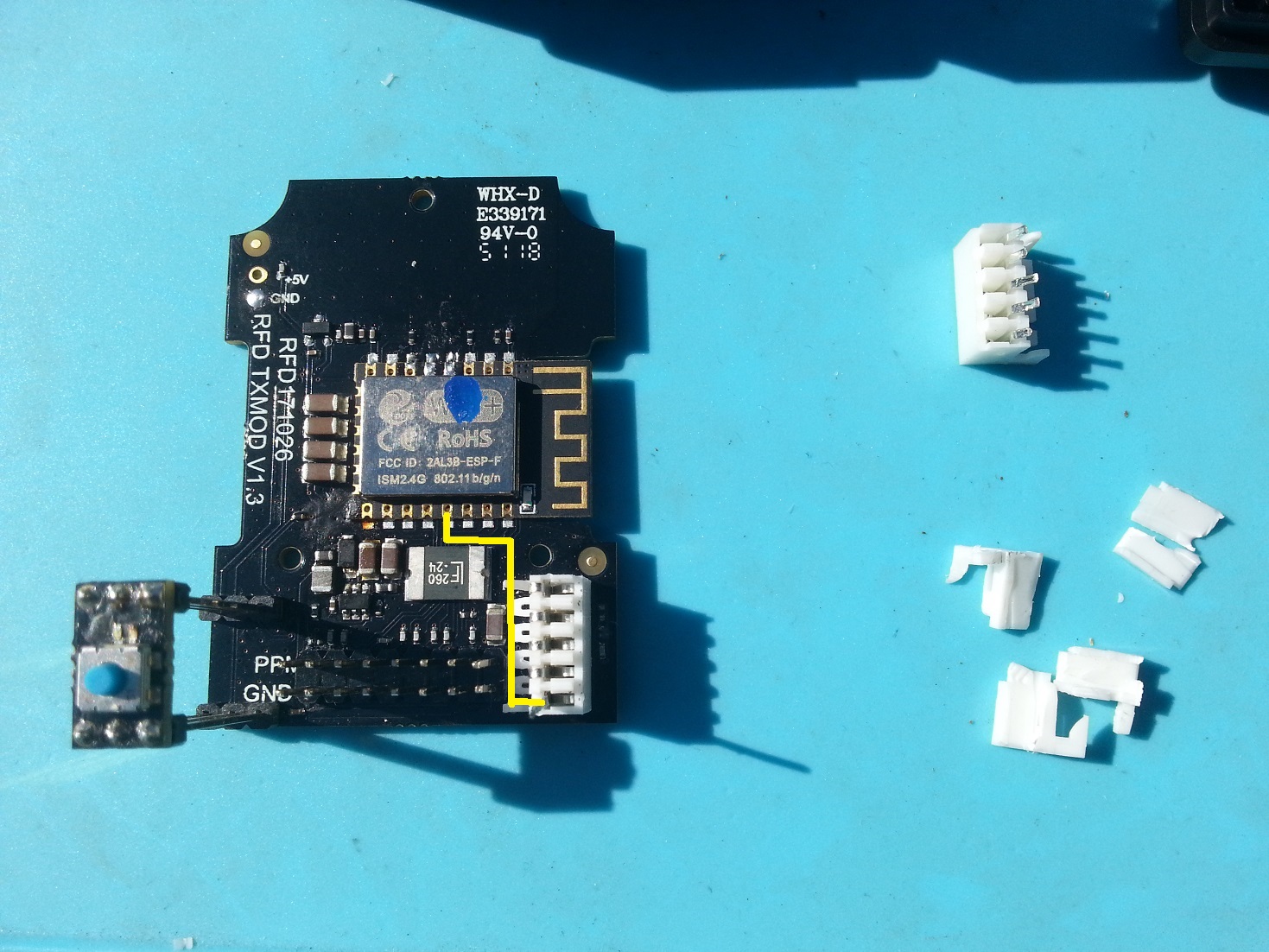
There is an ESP8266 on board and RFDesign publishes the source code for that module. I don’t know if there are any free pins on the ESP8266, but wouldn’t a more eloquent solution be modifying the ESP8266 source to output Frysky telemetry to a pin (using probably software serial)? Then one would just need to run one wire to pin 5 on the TXMOD.
Or if there isn’t enough space on the ESP8266, just echo out the MAVLINK messages to that pin. In this case one would need to create a Lua script for MAVLINK for the transmitter. Seems like a good upgrade that should be provided by RFDesign. I wonder why they didn’t think to do this.
@yak-54
Can you share your .hex file of your teensy 3.2 please. Am stack with it as i dont know how to compile in arduino. Am trying to built a relay station also.
yes i was told that by RFD i have not tested it yet is it frsky pas-through or just Sport ?
i would hate to lose Yaapu script
ok i just got an reply its pass-through yes it supports Yaapu
will test it later on tonight see how it goes
We have modified two of the TXMOD v1 units. They have been great to test with, but we have a few problems. The controller (a Horus X10) frequently announces “Telemetry Lost” followed immediately by “Telemetry Recovered”. It is as if there is a brief delay in s.port data of a fraction of a second and the Horus announces both the loss and recovery of the data. The other problem we noticed was there was no message to indicate the complete loss of signal of an aircraft. There is the indication for lost telemetry but this message happens several times per minute in the worst case and is not a reliable indicator.
Has anyone else experienced these issues?
Edit: The other issue we are experiencing is that no data is read by the Yaapu script until a ground station connects over the link. We have the SRx params set to non-zero but it does not seem to have an effect.
We always see that issue with the standard frsky 2.4 link, but the problem we are seeing with the TXMOD seems to be independent of distance. We are on v3.16 for the radio modules and v1.41 for the TXMOD.
The more concerning issue right now is the lack of indication that the connection is lost. If you unplug an aircraft while using the txmod, the module will continue to send the most recent rssi to the horus through s.port.
if i turn off the flight controller on my setup its not holding rssi but it fall back to 69 db and holds that not going back to zero in yaapo ?
is this config setting somewhere i have over looked
and open tx in the sensor page it holds the last value it receded last as well
Sorry for the late reply. I really appreciate the help. The warnings or lack there of are in Yaapu on openTX. I tried to record some of the issues on camera. There is a brief view of the testing setup in the second video. The original behavior I was seeing when unplugging the aircraft was the rssi would hold at the previous value indefinitely. Now, upon further investigation, I have found a few behaviors that can occur.
On disconnect the RSSI holds at the last reported value. OpenTX announces telemetry lost. This is the original behavior. I don’t have this one on video right now. Seems to not want to occur anymore.