So my Orange RX / TX 1W LRS UHF units arrived about a month ago, and after a steep learning curve I eventually had it all working. All except my trusty Taranis display. After using FlightDeck, and then also yaapu’s excellent LUA script for a while, I found it very difficult being without quick and easy flight data. Since the ground Orange RX has a Mavlink serial port it’s easy enough to hook up (by cable or BT) a laptop or tablet and run your favourite GCS app, but I sure missed that Taranis screen!
There are some great Mavlink/Taranis converters around, like this excellent one published by athertop et al on GitHub, but they output native FrSky S.Port sensor telemetry. FlightDeck and yaapu’s script are designed for the FrSky DIY sensor number range 5000, or “Passthrough” protocol, implemented in Ardupilot 3.5 and later (but not in PX4 Pro to the best of my knowledge).
Long story short, and out of necessity, I’ve written Mavlink to Passthru converter firmware for the Teensy3.x, which works with FlightDeck and/or yaapu’s LUA script. Many thanks and acknowledgements to yaapu for his wise and insightful advice, also to florent for guidance on FlightDeck requirements, athertop for testing ideas and Craft and Theory for the Passthrough protocol.
The beta of the firmware is here
Feel free to use it at your own risk
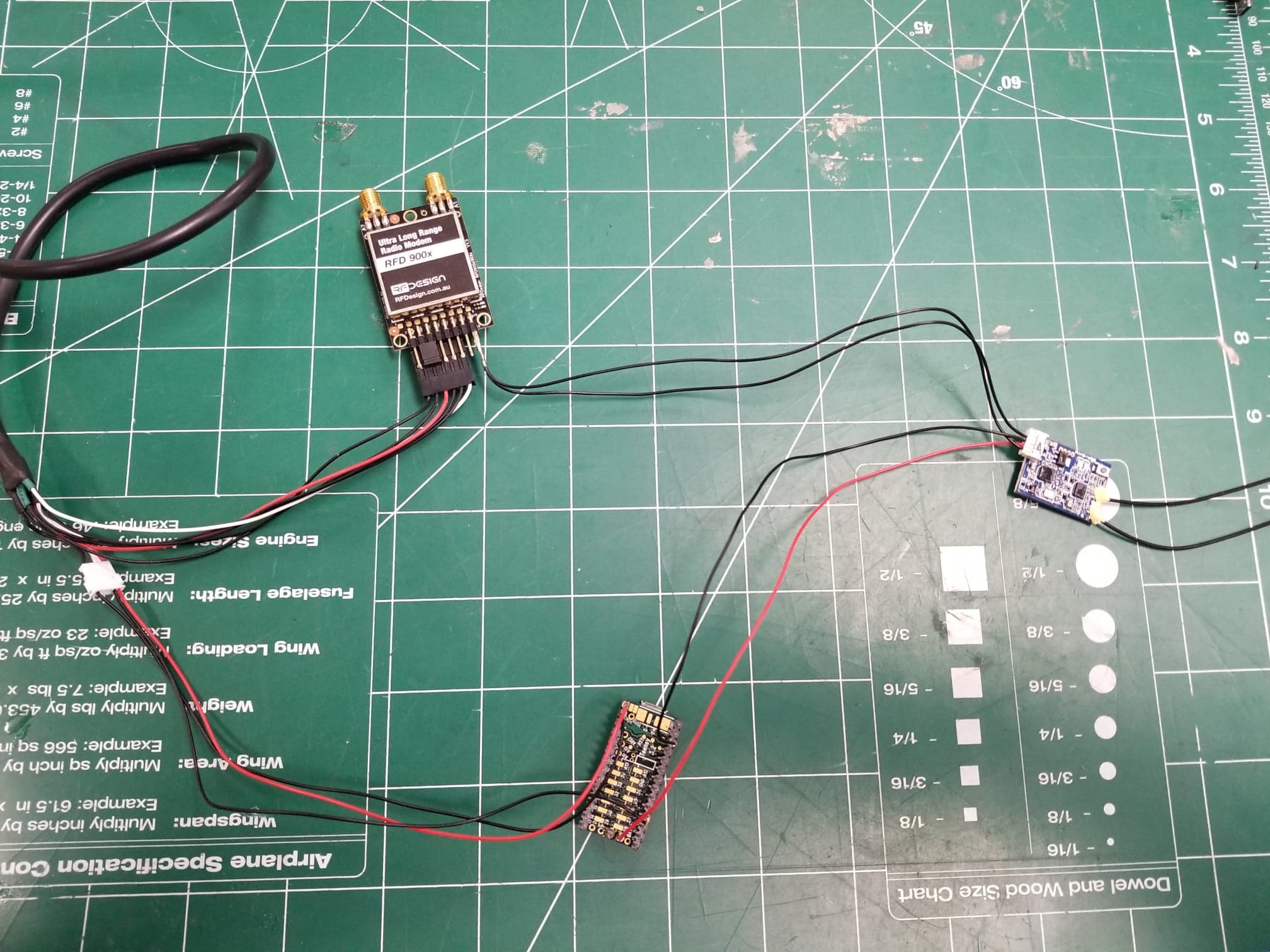
The target board I used is the Teensy 3.2, but at a push the firmware should run on a cheap STM32F103C, if, for example, we forgo the debug serial and / or the auxiliary Mavlink port.
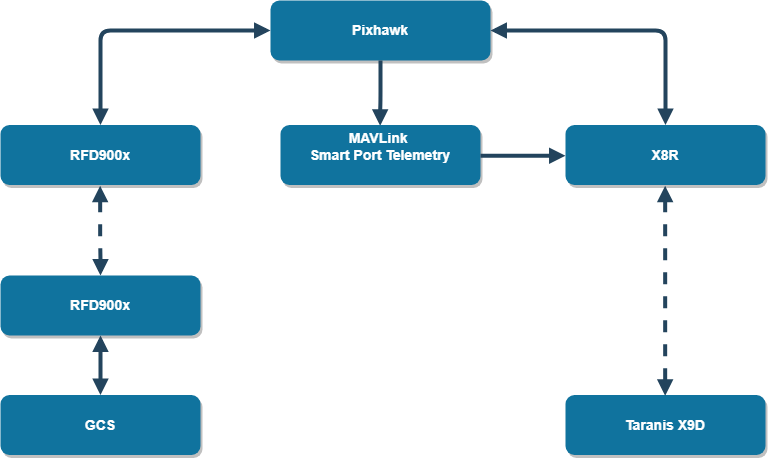
The MavlinToPassthru converter comes in two versions:
- For use on the air-side: Mavlink telemetry in, Passtru telemetry out into a suitable S.Port equipped FrSky receiver, like the XSR or XM+
Comment out this line // #define Emulation_Enabled
- For use on the ground-side, likely in the back bay of a Taranis (or Horus), to convert Mavlink out of the Orange RX / TX 1W into passthu telemetry for feeding into the S.Port pin of the Taranis. Mavlink is available on serial3 of the Teensy 3.2 for connection to a Bluetooth adapter (like the HC-06), or anything else.
Un-comment out this line /#define Emulation_Enabled
For the auxilliary mavlink port, un-comment this line #define Aux_Port_Enabled
In this image I use pin 8 for the S.Port. Default is pin 1.


 The solution can sometimes be so easy
The solution can sometimes be so easy