thx a lot for the detailed response.
You indeed gave a very nice and comprehensive explanation of things, which has much value by its own, and your response should probably become the first-go-to reference henceforth.
I’m afraid however that I’m not totally satisfied as regards the practical implications.
I see your point with the take-off-weight, and I have no doubt that when changing it by a factor of 4 that this has implications. However, I think that’s for many not very relevant. My takeoff weight may vary a couple of 10% at most. The bottom line is, that varying the take-off weight by factors would not be a practical method for me to validate the impact of a better MOT_THST_EXPO value.
I also see your point with the oscillations at low/high throttles. This would go more along lines I would have imagined for validation. I mean, one hopes for a better control, so looking for the “goodness” of the control is an obvious thing to do. The problem is though, what exactly should one look for to evaluate this “goodness”, and equally if not more important, how to clearly distinguish the effect from the effects due to non-“perfect” tuning. For my copter I could not see any oscillations, and I think I wouldn’t even if they would be there theoretically, simply because the high/low throttle situations always are short in what I’m doing (it’s not easy to see oscillations on top of a narrow spike, right). I’ve realized that you address this, IMHO crucial, point briefly, but it’s unclear how one would validate that your (or whomever else’s) idea of a near perfect tune at hover has been achieved. So, I do see these two issues here, how to establish a reproducible reference point, and what exactly to look for in some data to evaluate the loss of “goodness”.
For instance, one could think about the auto tuning. But to me it looks that it is not really sufficiently reproducible. Also, I wonder, since it does quick tilts, during which the motor is clearly driven quite a bit away from the however point, in how much that non-linearity expressed through MOT_THST_EXPO isn’t actually partially accounted for. I.e., it likely would not yield a reasonable reference point. And so on.
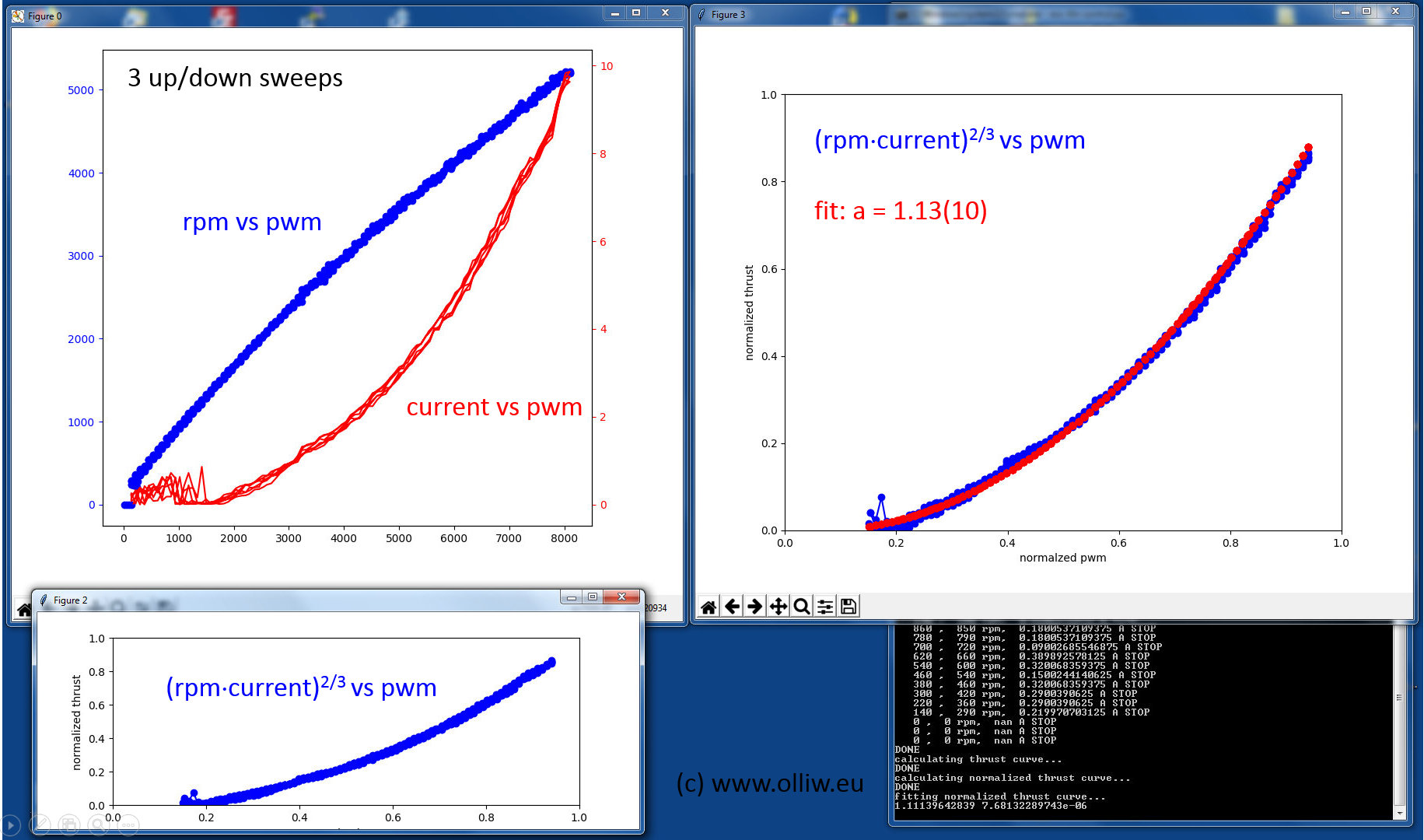
I would be, btw, also perfectly happy if the answer would be - if that would be the correct answer - that only if one is quite away from the 0.65 it would make sense to adjust MOT_THST_EXPO. I mean, I’m not trying to do 0.01% science here, and most wouldn’t find that practical either. So, if the answer would be that getting a rough measure of the thrust curve to get a rough check of MOT_THST_EXPO would be way sufficient, then this could be a more practically relevant answer than any 0.01%. For instance, you mention the possible effect of the ESC. I was wondering about that too, but would think that this should show up quickly in even only a rough thrust curve measurement. Of course, one still would want some confirmation through looking at data that the correction was indeed useful. Not sure I could explain what I mean.
thx, Olli