For an X-Quad copter configuration, will tilting motors in the direction of motor torque (only circumferential tilt, no radial tilt), work out-of-the-box with pixhawk + ardupilot? If not, what tuning or modification is needed?
From a torque / yaw perspective it should not be a control problem, but I am not sure if circumferential tilt is a problem for lateral control. Also the tilted motors introduce a relatively tiny amount of pitch / roll moment from tilted torque vector.
You are still loosing efficiency in order to gain some yaw control authority.
But are you yawing so often that it makes sense to tradeoff efficiency for it?
Anyway, back to your question: to do it 100% correctly you will need to change the source code loops.
But yes, it will work just fine without any changes, if the twist is kept small. Just don`t ask how small is small
the efficiency loss can be negligible for a huge gain in yaw authority control. its very easy for it to be worth it, especially if you consider yaw control without tilt consumes lots of power. examples:
2 deg is recommended in the link above for huge gain, and that means 0.06% loss. Is that even worth complaining about? Like I said, given how inefficient pure-torque-based yaw control is, you might even save power over the course of a mission.
So you say we need to change the source code loops; got any examples?
if your target is 2 deg I do not think it is worth the trouble of changing the source code.
Just follow all the tuning procedures as normal. And make sure there is no yaw imbalance (when hovering all motors must get the same PWM value).
If there is imbalance, adjust arm twist to compensate.
And please post the results, it sounds interesting.
From your previous answer it looks there are no adverse effects so i guess it would be nice to have a better yaw at the expenses of a negligible efficiency drop.
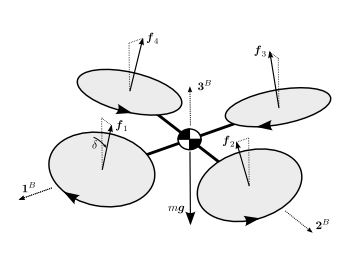
Can someone help me understand the difference between a “radial tilt” and a “circumferential tilt”? Maybe a little diagram or link?
From reading this post it seems a radial tilt is discouraged and a hack for crappy flight controllers. But circumferential is completely valid for increasing yaw authority. Am I understanding correctly?
Thanks. I can’t see clearly in the videos above, I’m still a bit confused what the physical difference between a radial and circumferential tilt is. Do you have a picture you could post that helps explain this?