Back in the air today for some quick testing. While having low wind (3-4 MPH) is generally a good thing, it didn’t blow hard enough to allow a complete test. However, small steps can be beneficial.
I made several changes.
-
I tilted the left rear motor out 4 degrees to cancel out the 2 degree tilt in the motor boom and to leave the motor tiled out a net 2 degrees.
-
I adjusted Q_WVANE_GAIN from 0 to .2
-
I adjusted Q_M_SPIN_MAX from .95 to .98. My ESCs have 1960 as their max value.
-
I adjusted Q_M_SPIN_MIN from .15 to .10. My ESCs have 1040 as their lower value.
-
I adjusted Q_M_YAW_HEADROOM from 200 PPM to 220 PPM.
However, I believe that only the first (and possibly the last change) was significant in today’s test. All of the quad motors stayed far away from their limits during flight. In particular, the left rear motor on channel 6 significantly reduced it’s relative output compared to the other motors:

Now the two rear motors are significantly below the front motors in output at almost all times. This seems like it may be reasonable due to CG and quad boom placement.
Now the big question. Did this work to fix the yaw authority problem? My answer is that it seemed to help, but more needs to be done. I felt that I was controlling yaw well most of the time…but at least once or twice the plane started to turn due to wind. It never went a full 360 while doing this, but the wind was very light.
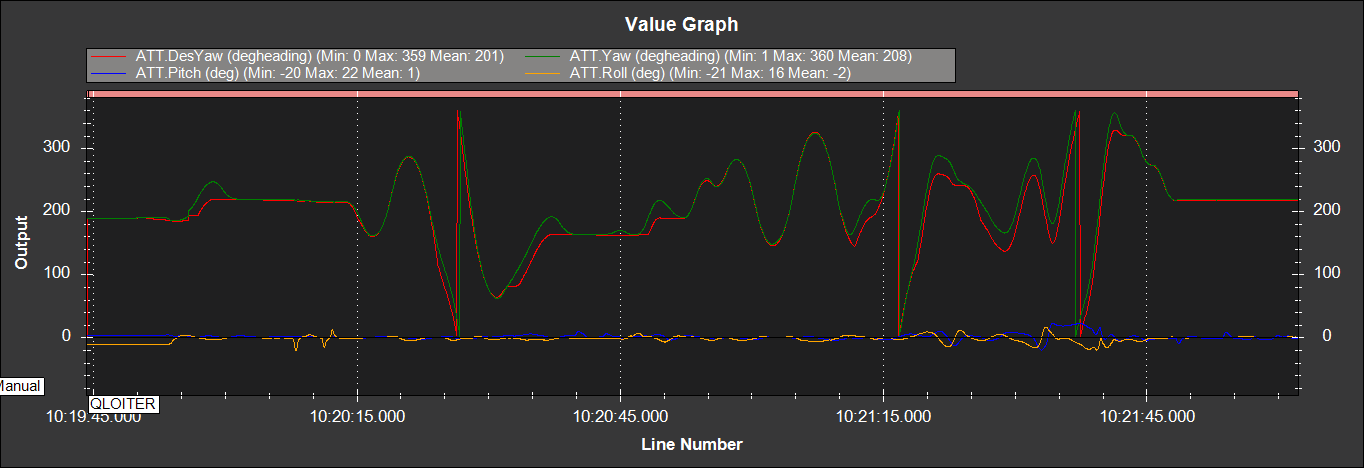
I suspect the trick in reading ATT Des Yaw (red) vs ATT Yaw (green) is that the Desired Yaw should lead the Yaw…not vice versa. Roll and Pitch lines are at the bottom (brown and blue)
I believe I probably need to re-run the yaw autotune since I’ changed the motor mount. And perhaps I should angle out the front motors a couple of degrees each.