I’ve decided to continue my Wing Wing Z-84 QuadPlane conversion project. Part 1 of the conversion is in the Plane 3.8 forum here.
The project left off with my conversion hover tested but not doing transitions to forward flight. Some oddities were revealed in the quad motor/ESC performance and I also felt that my hover power level was a bit on the weak side as I could not hover on windy days.
In addition to updating the APM Plane firmware to v3.9.x, I decided to replace the old (very old) BLheli HUG ESCs with some new Hobbywing XRotor 10A Mini ESCs. I liked the long, thin profile of the ESC that should fit nicely on my flat carbon bars. The ESC has many features that should help it to perform in a small QuadPlane design.
If this upgrade doesn’t perform properly, I have some higher power Quad 250 size motors that I will install next.
Hi GregCovey, I was wondering what your lift to weight ratio right now (since you mentioned it’s a bit on the weak side). I have got a tilt rotor quad plane with a L/W ratio of 1.7, and I just want to compare it with yours
My hover current looked to be around 8 amps at 55% throttle the last time I checked it. The “weakness” of lift in wind may be due to the angle of the booms or the HUG ESCs occasionally slipping. At times, I can hear a motor whining like it got out of sync with the ESC. I am hoping that my new XRotor ESCs fix that.
I finished my ESC swap on the Wing Z-84 and did a nice hover test in the backyard. I didn’t hear any of that strange noise I used to hear with the other HUG ESCs so hopefully the next transition will go better. The weather this weekend looks like crap so I’m not sure when I’ll get to test it.
My health happened. I lost a few months of flying, just after Winter ended, but hope to start back in a few weeks. The testing with the new ESCs is still on my list.
Interestingly, I have the same looping issue as you when transitioning…as soon as the motors move from the 55deg assist position to the 90deg flight position it accelerates and wants to spin…i my case hard to the left…I tried two different motor systems…a marginal 1806, and very good hover lifting 2204 set…
I was considering trying to move to the 4 motor normal X frame config, like you…but reading the thread thoroughly has dissuaded me…I am using close to the same tuning params as my Convergence, which flies great on Arduplane…guess I will just move on the MiniTalon conversion I have accumulated parts for and abandon this project…z-84 doesnt seem to want to be a quadplane.
Hmmm…indeed odd but thanks for the report. My re-testing with new ESCs and firmware is coming up soon. It was delayed again due to additional testing on the Convergence forward bias feature and some unusually hot weather.
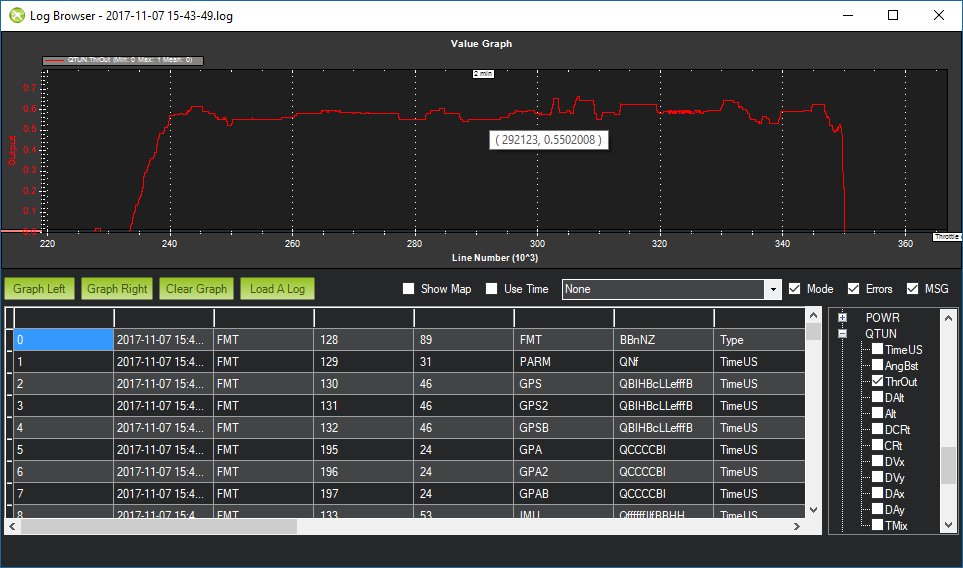
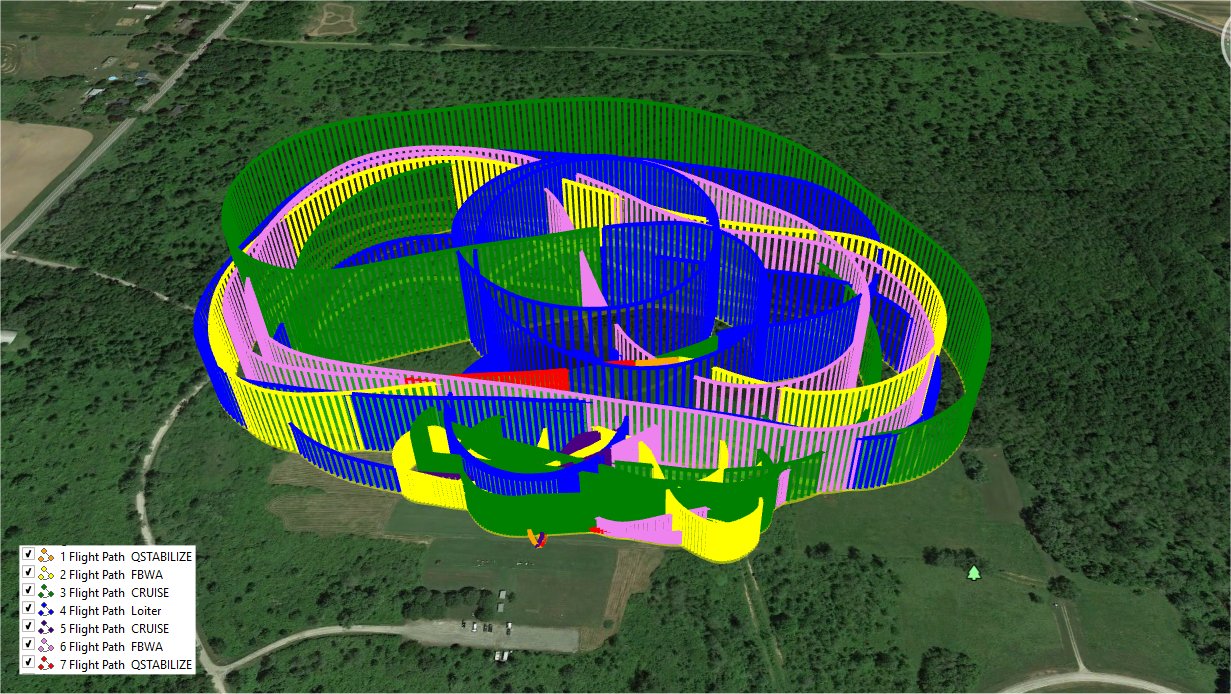
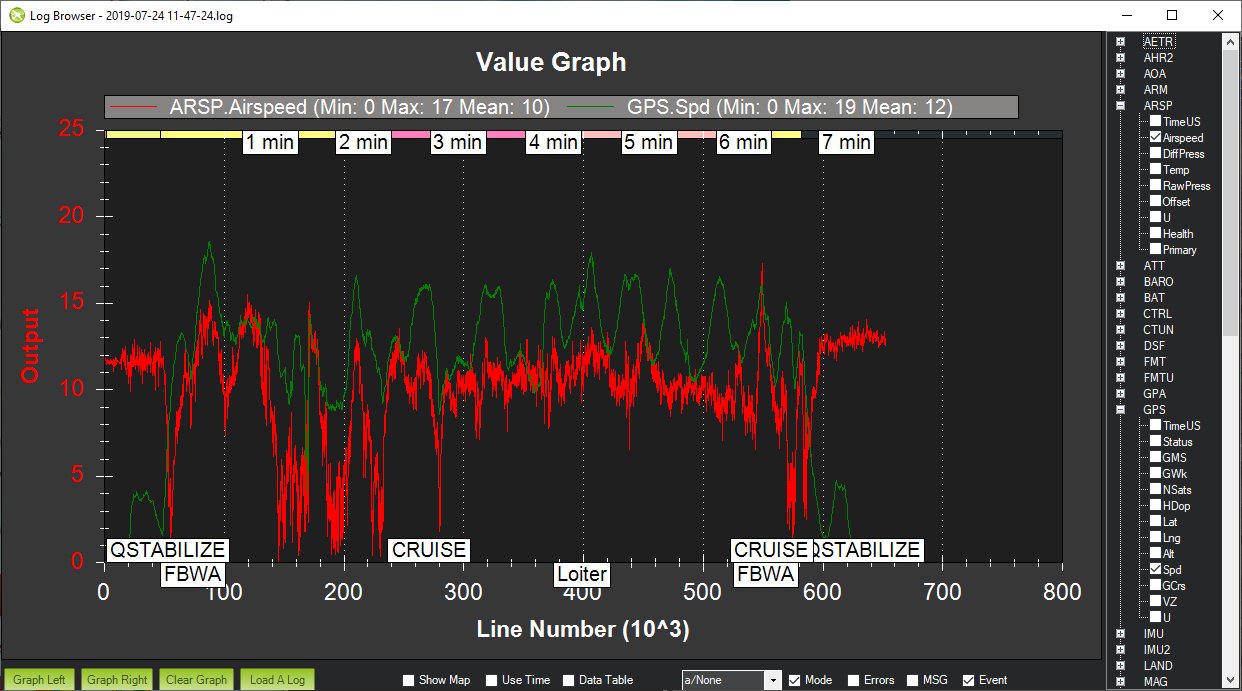
Success! I had two great flights today with my new setup on the Wing Z-84 QuadPlane so I was happily surprised. There was no more weird slipping sounds while hovering with the new ESCs. Both flights had great transitions (QuadPlanes usually do) and the PIDs seemed fine for both hover and forward flight modes. I’ll post my Logs and params soon. I had the AS sensor disabled so I want to check that it appears to be working before I enable it. I used the following flight modes:
QSTABILIZE
QHOVER
FBWA
CRUISE
LOITER (Circle)
I had made the following changes since my previously failed attempts last Fall.
Installed 4 XRotor 10A Mini ESCs
Calibrated the ESCs
Updated firmware to Plane v3.9.8
Disabled AS Sensor
Sad news that my video guy has passed away so I didn’t get any video this time. Maybe I can teach another guy to help out. It sure was fun to watch it fly!
When compared to the E-flite Convergence, I liked how much slower I could fly the Wing Z-84. It never felt like it would tip stall, even at 10m/s. The forward flight current draw looked to be 3-4amps depending upon the wind direction. My 3-cell Glacier 30C 1300mAh pack looked to have 60%-70% left in it after my 7 minute flight.
I’m not sure what to make of the AS sensor reading yet. Perhaps it needs to be calibrated.
WIth those currents, you should be able to run a 3S 3500mah LiIon pack…10A cont, 15A burst as long as you dont do long sustained VTOL mode climbs…then you should get almost an hour of cruising…
I just finished retrofitting my beater z-84 that did the tilt-rotor config to normal plane…but, given your normal quad config sucess, I am going to reconvert my beater Z-84 to VTOL but with 4x 2204/2300Kv motors this time instead of the tilt-rotor scheme…I think with the motors sticking out as far as they did, it was just too sensitive to any thrust line misalignment in forward flight
btw, I have been tuning my Convergence a bunch and have a much better plane mode PID and TECs tune now…
Sounds good. I using a Titan 4s 3500mAh pack in my stock nano Talon and it seems to work great. It flew 30 minutes using only half the charge so another 1 hour setup.
I’ve never done a TECS tune before so it’s something new to learn. What air speed sensor are you using? Can you post a pic and param file on the Convergence thread?
No speed sensor…will post on Convergence thread once Andrew/crew help me understand if this is a bug, or just something I missed: Auto Mission Altitude Glitch