Perhaps the 18m/s is too high. I did not set it so it must be the default setting…which I thought was much lower around 10-12m/s. Here are two speed graphs from my non-VTOL wing testing. The first one was in lower wind and the second one was in higher wind. If I choose a calm day, perhaps I can try 10m/s or 12m/s?
Greg, here is my 2 cents, maybe the forward fly makes the front propeller windmill and creates an induced lift (like a canard) that cannot be conter-balanced by an ailevon because its missing the arm leverage of a stab. In this case you could try to activate brake on ESC ?
It’s a good suggestion, thanks! The ESCs are some older version of BLheli so I don’t have a programmer for it. From Rolf’s graph, it seems like the quad motors should not have turned off yet because I was below 18m/s.
I am thinking of lowering the ARSPD_FBW_MIN value per Rolf and also changing the Q_ASSIST_SPEED from 0 to something low like 10 to see if it helps with recovery.
My 3-blade GWS prop may be crap so I may also try a better 2-blade 6" prop. I should post the video and logs for the one time it did transition to FF and I got a nice wide turn with near full left aileron.
Here is the video I referenced above. This is the initial flight of my Wing Wing Z-84 as a QuadPlane. I’m using the same 2-blade 5x3 prop for forward flight that I used before it was a QuadPlane. Although it hovered fine, the transition to FBWA mode has an issue. It did fly for a while and then lopped around again. I was able to save it by going back to QStabilize mode. The wing is so light, it may not have hurt itself in a crash.
How heavy is the Z84 ?
I estimate your average airspeed while cruising was 10 m/s (graph Wingz84Flight7.bin) respectively 12 m/s (graph Wingz84Flight9.bin). The stall speed of this non-VTOL-Z-84 could be 8-9 m/s. But this Z84 was still not converted to a quadplane and the take-of-weight of the VTOL will certainly be higher and therefore stallspeed too. How heavy is the Z84 ?
Another issue: What about the COG in relation to the quadmotors ?
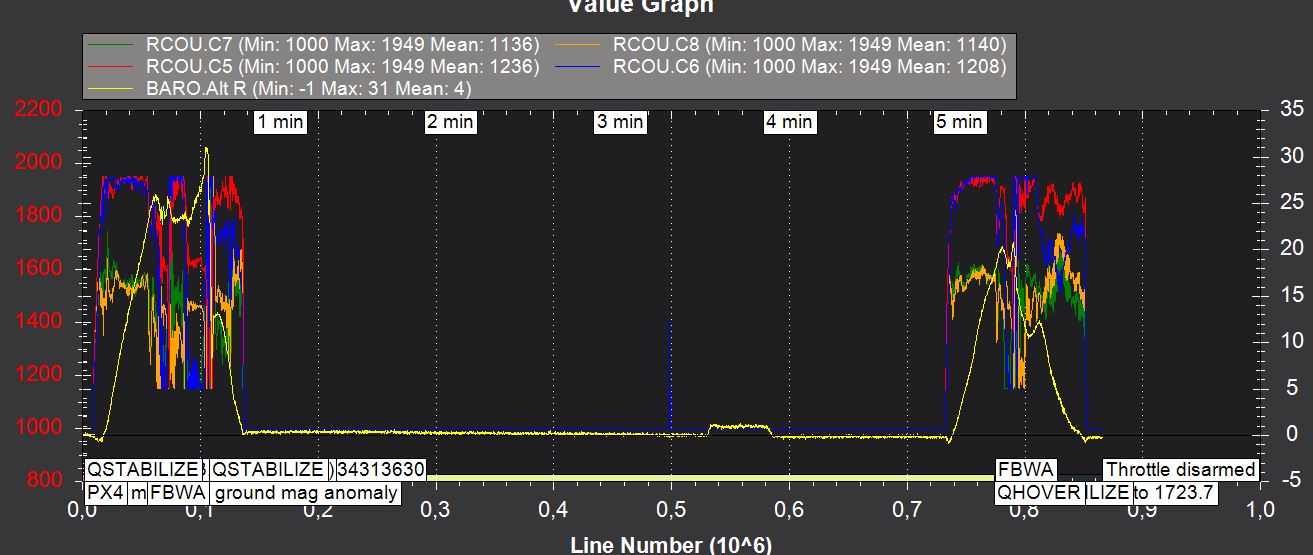
The motors at outputs 5 and 6 are saturated while motors 7 and 8 are floating at 1500:
The Wing Z-84 is RTF without the quad assembly at 15oz using the 3s 1300mAh Lipo pack. With the two quad bars, the additional weight is 6.6oz for a total QuadPlane weight of 21.6oz (612g). The quad booms were mounted to maintain CG.
Motors 5 and 6 could be saturated to fight the breeze. There isn’t much power in these motors.
One thing I was going to do was to re-calibrate the ESCs. I never re-calibrated them from when I stole them off my 230mm quadcopter.
P.S. In your graph above, the first minute was the video. We then walked over to the saved QuadPlane and tried another flight with the same result.
I checked the motor calibration and they all started together so maybe they were calibrated and I don’t remember. However, you are correct about the C5 and C6 throttle being much higher than C7 and C8.
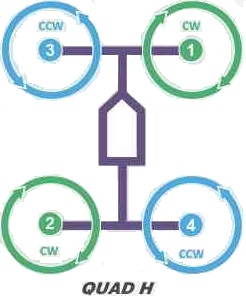
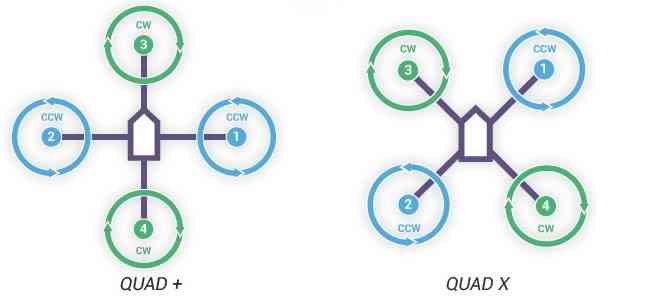
It looks like I have QUAD and H-FRAME set up so my assumption that C5 and C6 throttle being on the front two motors was incorrect. The motors for X or H frame are in the same position but the rotation is different. If there was a CG issue, I would expect C5 and C7 outputs to be saturated or C6 and C8. I can’t explain why C5 and C6 are saturated so perhaps I need a re-calibration to eliminate this as a reason.
Channel 5: Front right motor, clockwise
Channel 6: Rear left motor, clockwise
Channel 7: Front left motor, counter-clockwise
Channel 8: Rear right motor, counter-clockwise
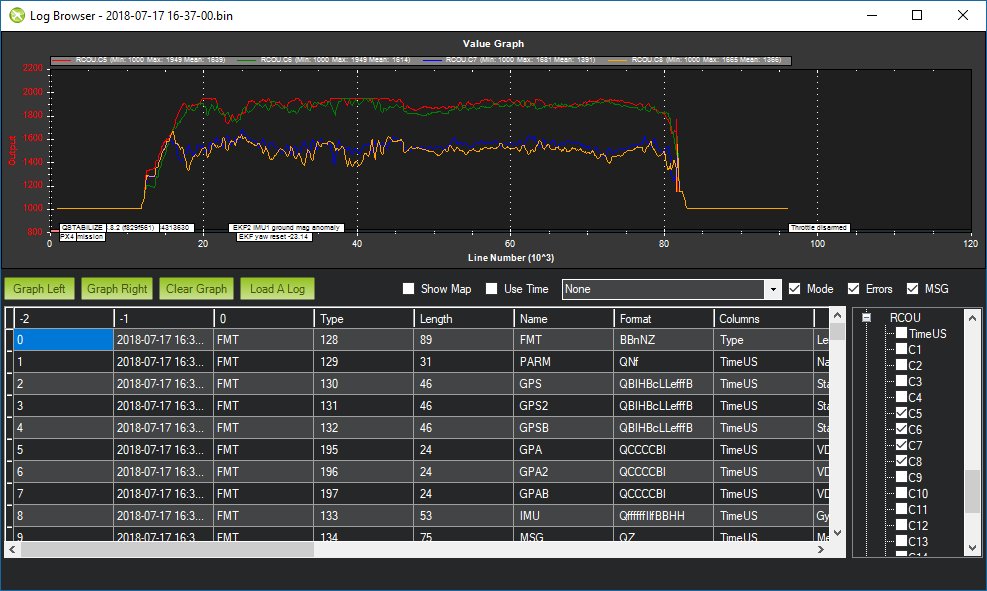
I re-calibrated the ESCs with Q_ESC_CAL=1 procedure. It worked fine and all motors started together on low throttle. I then did a short hover in my backyard with some breeze.
My RCOU graph still shows a difference with C5 and C6 which correspond to the descriptions below. I also verified H-frame rotations using Motor Test. Perhaps I have some bad motors or ESCs and they are making the wing go nuts during transition to FBWA.
Channel 5: Front right motor, clockwise
Channel 6: Rear left motor, clockwise
Thanks, guys. I will check these possibilities but I think the Wing Z-84 would not hover with some props reversed.
I fixed a copy-n-paste mistake above. For H-frame, the rotations are below. Again, this was verified with Motor Test in Mission Planner.
Channel 5: Front right motor, clockwise
Channel 6: Rear left motor, clockwise
Channel 7: Front left motor, counter-clockwise
Channel 8: Rear right motor, counter-clockwise
I am pretty sure your props are ok, but consoder checking how straight the motors are, if some are twisted than you would exactly see split graphs in opposite corners, same as it i happening to you.
The X and H frames just change how the mixing is done. Note that the motor rotations are opposite. It was once suggested by Tridge to help with an issue I had on the Ranger EX QP. It didn’t seem to change anything. It was also suggested to use H-frame on my mini Talon QP but others have used X-frame also with success.
My experience is that you either pick one or the other. If you have yaw issues, try changing frame types.
You might want to consider an inexpensive RadioLink mini Pix. I did testing on two of them a year ago and they seem to work fine as long as the GPS is away from the R/C or APM telemetry. More recently, Arxangle did a review on it too. The RCG thread is here.
Another option that I have been wanting to try (but haven’t had the time) is to use one of the less expensive F4 boards running ChibiOS with APM. The idea is to use a more integrated flight controller for smaller FPV aircraft and now they can run APM. The RCG thread is here.
When considering a flight controller for a QuadPlane or Tilt Rotor conversion using APM, make sure that you have enough outputs to cover the control surfaces and VTOL controls. One reason I picked the more expensive PixFalcon was that at the time, there were fewer choices that provided 8 outputs. For a wing QuadPlane, you only need 7 outputs.
Right now I am building a Nimbus 1800 VTOL so I am holding off my temptations on looking at a Nano Talon or Nano Goblin. I never know what will happen once the winter doldrums hit.