I have spent some time tuning the PID and TECs loops on my Convergence and now its well tuned, and navigates great, holding altitude pretty tightly for the most part…Cruise is excellent, holding altitude thru max bank turns,and on the straights…but during Auto missions, I get occasional radical altitude misses…
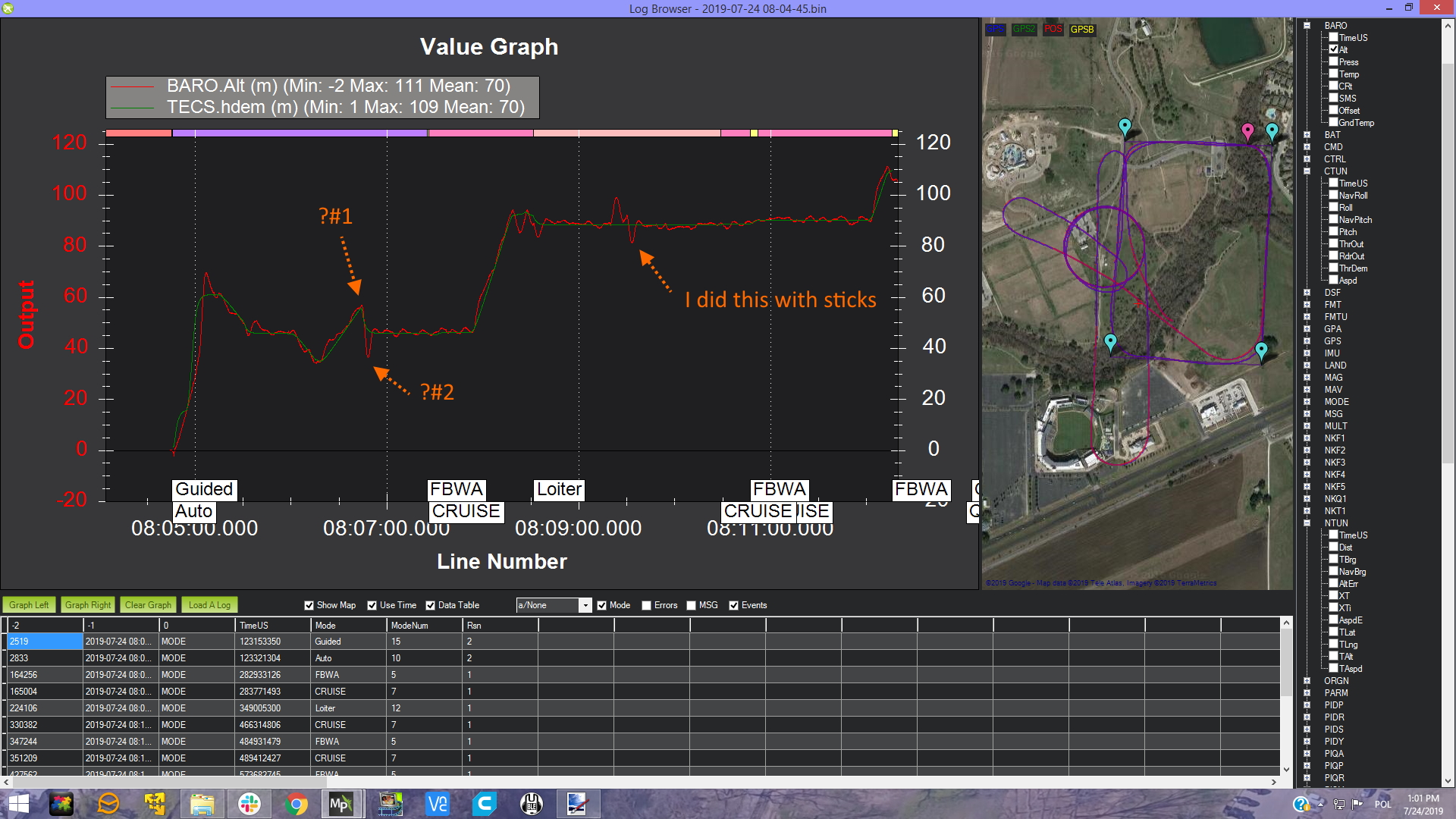
here is a log graph of a flight with Auto and Cruise portions and the altitude tracks the TECs demanded height pretty tightly…except randomly as it enters waypoint turns on occasion…it also sometimes does not seem to set the correct waypoint target altitude…
the flight starts with an VTOL_TAKEOFF to 15m…transitions, proceed climbing to the first waypoint at 60m, followed by a series of 45m waypoints, then a 30m waypoint and repeats climbing to 60m…the first lap (the mission repeats, jumping back to first waypoint after takeoff and repeats) goes well but at ?#1 the altitude target is lower than the 60m for that waypoint and it reaches the waypoint ,way below alt…
so the first question is why the target incorrectly set? its not because the plane cant climb fast enough…later TECs demands show much higher climb rates being used…the plane closely follows the demanded alt towards that waypoint…
the second question is why does the altitude drop precipitously once it reached that waypoint turn at ?#2…its apparently because NAV pitch suddenly demands a steep nose dive as seen below…
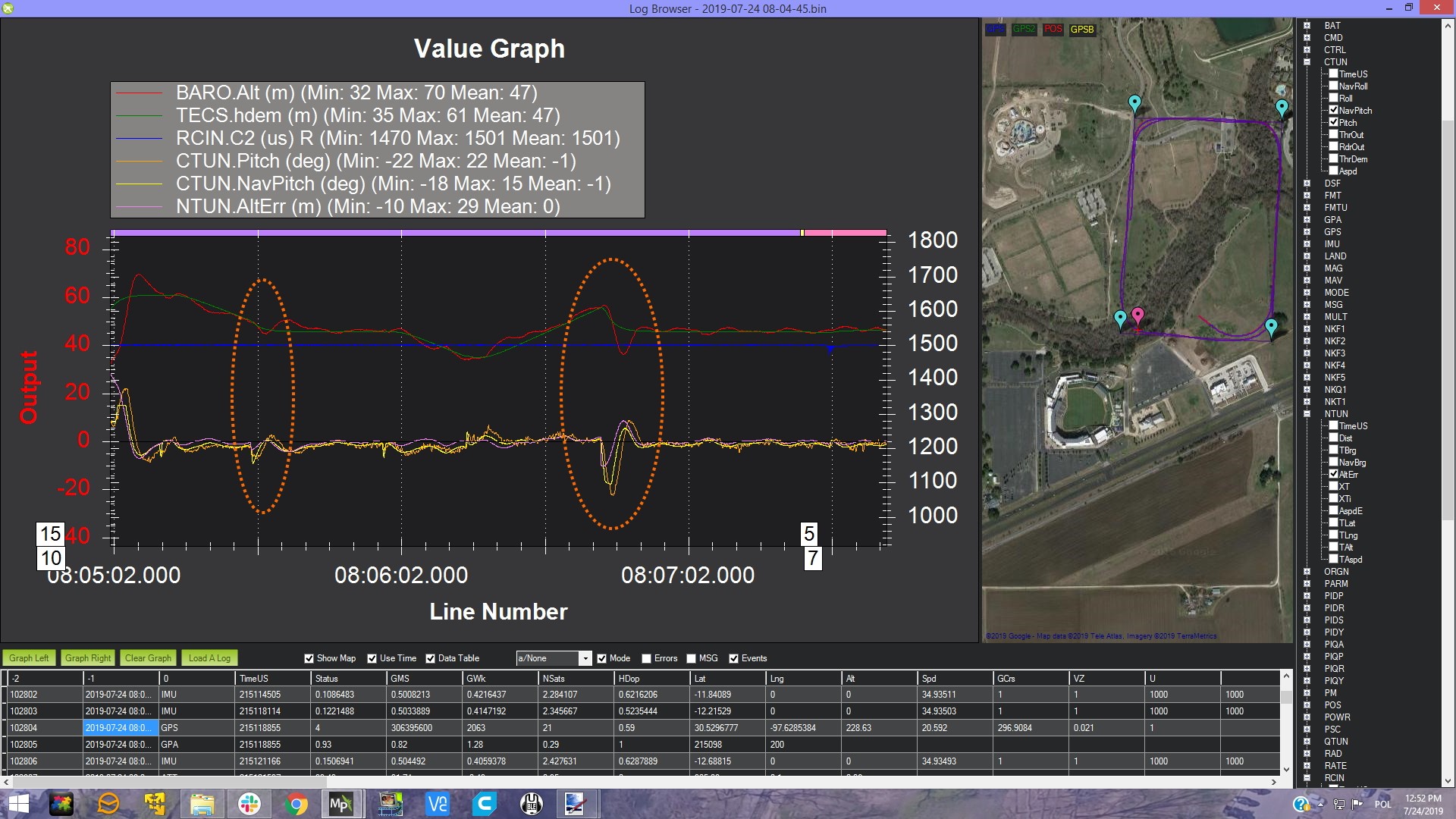
the plane exactly follows the NAV pitch and CTUN pitch demands…which cause the altitude loss…the TECs demand for altitude reduction to the next 45m waypoint appears smooth, so something in the NAV controller is demanding hard nose down…this is unexpected and potentially dangerous behaviour to me…note that a similar descent to next waypoint is demanded to the last 30m waypoint and it tracks TECs demanded descent well, so TECs descent demand appears to be working and executed well…
full log is here… https://www.dropbox.com/s/422y8ia4y6w8scm/2019-07-24%2008-04-45.bin?dl=0
video of behaviour with HUD data: https://youtu.be/OPSGNUujv8k
@tridge @WickedShell @peterbarker any ideas what is going on?