Interesting result. What is the weight with 4s 3.5Ah ?
The Wing Z-84 is RTF without the quad assembly at 15oz using the 3oz, 3s, 1300mAh Lipo pack. With the two quad bars, the additional weight is 6.6oz for a total QuadPlane weight of 21.6oz (612g).
The 4s 3.5Ah Li-ion pack weighs 7.3oz so a 3-cell pack would be a better fit.
1 Like
no, TECs controls altitude and speed…of the three main controllers (ATTITUDE,NAVIGATION,TECs)…without sensor, it still uses pitch and throttle, but in a calculated relation and using a synthetic airspeed…so actual airspeed will vary a little…with sensor, it holds airspeed much more constant, and you can directly adjust it with throttle nudge in throttle controlled modes (FBWB,CRUISE, AUTO,RTL,etc.)…without a sensor you can adjust airspeed also, but just relatively…and by tuning TECs, you will get better altitude control
the defaults for Ardupilot will fly almost anything…but tuning PIDS (ATTITUDE) and TECs, and NAV gets you optimized performance…at least thats my understanding…
1 Like
I got to fly both the Convergence and Wing Z-84 again today and both planes flew great! They are different styles indeed. The Wing Z-84 can fly slower than the Convergence and draws less current in forward flight.

@GregCovey is there one vehicle that you would recommend out of all your VTOL arsenal? For someone to get into VTOL, and thus that would be as painless as possible while still yielding a capable vehicle.
By my count, you have experience with the wing wing Z-84, Mini Talon, Firefly6, Convergence, Ninbus, and buffalo FX 79 – which puts you in a maybe unique and certainly awesome perspective position where you’ve played with most existing configs, except tailsitter I guess ?
Hi Loic,
You ask a tough question because your definition of painless and capable may be different than mine. For me, being capable means carrying a payload for mapping, FPV, video, and longer range flights. I consider it a fun part of the hobby to create a VTOL but also appreciate a design that is easy to convert. These choices all depend on your goals.
The Hobby King Bix3 was a nice plane to start conversions on because it was relatively inexpensive, could carry a light payload, and, flew slow enough to see just what was happening during transitions. It was difficult to stall so mistakes were forgiven. Spare parts were also available.
You’ll need to choose a design that is best for you. Your goals may even change before you finish your first project. If you don’t see anything that fits your needs, then wait a bit and something may arrive sooner than you think.
Good luck!
Ah it appears I was missing a couple of planes of yours !
I do specialize in tough questions, but my definition of capable aligns with yours. I’d also agree with the painless / fun of building one but unfortunately this project is a work one, and so painless translates into less time building – more time operating (even though the first VTOL will only serve as proof of concept, not a production plane of course !)
I glanced at the Bix3 thread – amazing write up as always – and it does seem like a good start. I should probably spend a bit of personal time on (re) learning how to fly a plane so the Bix might be good for that as well. Or maybe something even more basic to start out.
Anyways, thanks for your reply! As for waiting for something to come along, I do check on the VT Bird 1.5 website almost daily …  Another way to think about my question is, between “ready to fly” packages like the Nimbus vs a ArduPilot conversion (+quadplane conversion if the base vehicle is not VTOL already) , are the ( more expensive) RTFs really RTF or do they require extensive tuning and “learning”? My bottom line is not $ amount spent on the vehicle but total $ amount on the project, meaning if I spend two weeks on a build, the man hour cost outweighs the initial RTF vehicle cost…(huge gain in experience though for the build!)
Another way to think about my question is, between “ready to fly” packages like the Nimbus vs a ArduPilot conversion (+quadplane conversion if the base vehicle is not VTOL already) , are the ( more expensive) RTFs really RTF or do they require extensive tuning and “learning”? My bottom line is not $ amount spent on the vehicle but total $ amount on the project, meaning if I spend two weeks on a build, the man hour cost outweighs the initial RTF vehicle cost…(huge gain in experience though for the build!)
I spend very little time tuning as APM Plane is typically close to start with on the larger planes. I never use Autotune. It doesn’t mean it is bad or doesn’t work, it just means that you don’t need to spend alot of time tuning. As for the Foxtech Nimbus V2 VTOL, I would expect not to have to do any tuning.
There is a new player coming that I will be looking at soon. The MakeFlyEasy Freeman which is a RTF Believer QuadPlane. It will be interesting to see how it performs out of the box. There is a separate thread on it in this forum.
1 Like
Great thanks for all the info!
And especially about the new player – I’m disappointed in myself I didn’t come across the corresponding thread before…I’ll check it out! I’ll now stop hacking this thread …
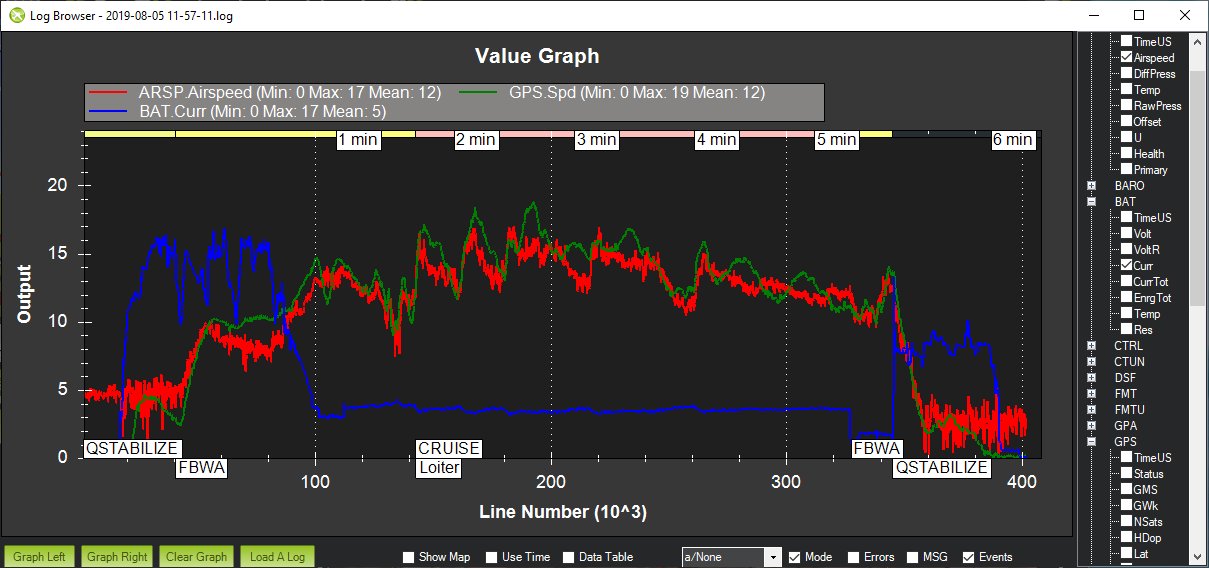
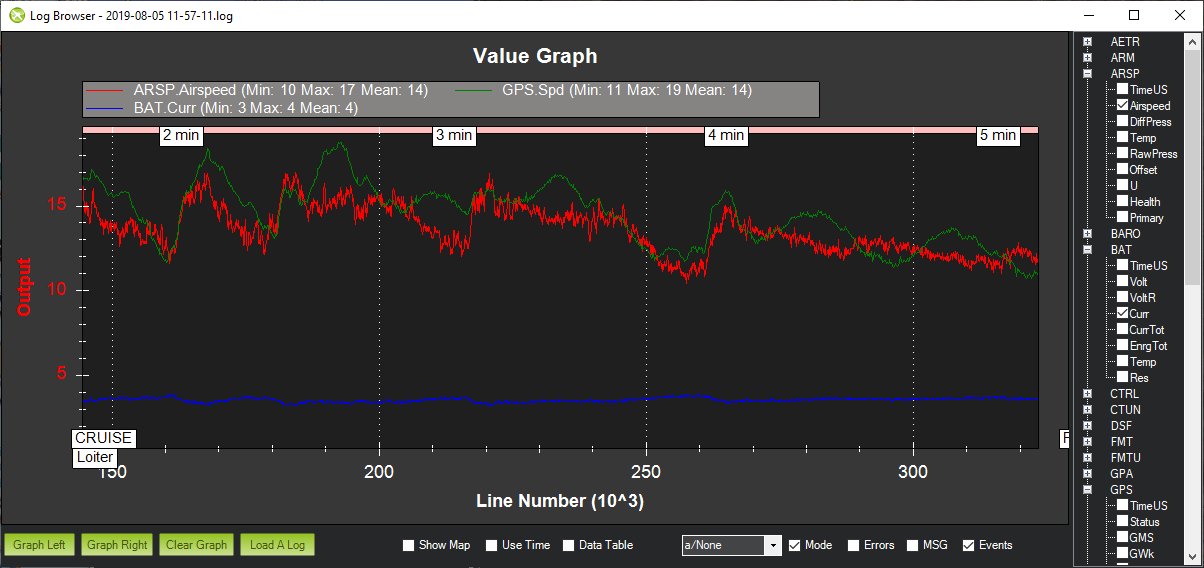
I calibrated my AS sensor on the first flight per the Wiki instructions and then enabled it for the second flight. The Wing Z84 continued to have good transitions and flights with the AS sensor enabled. The wind was light and the current draw is so low in forward flight that the effects of the AS sensor seemed negligible. This little wing really likes to fly!
WingZ84_ASsensor1.param (16.9 KB)