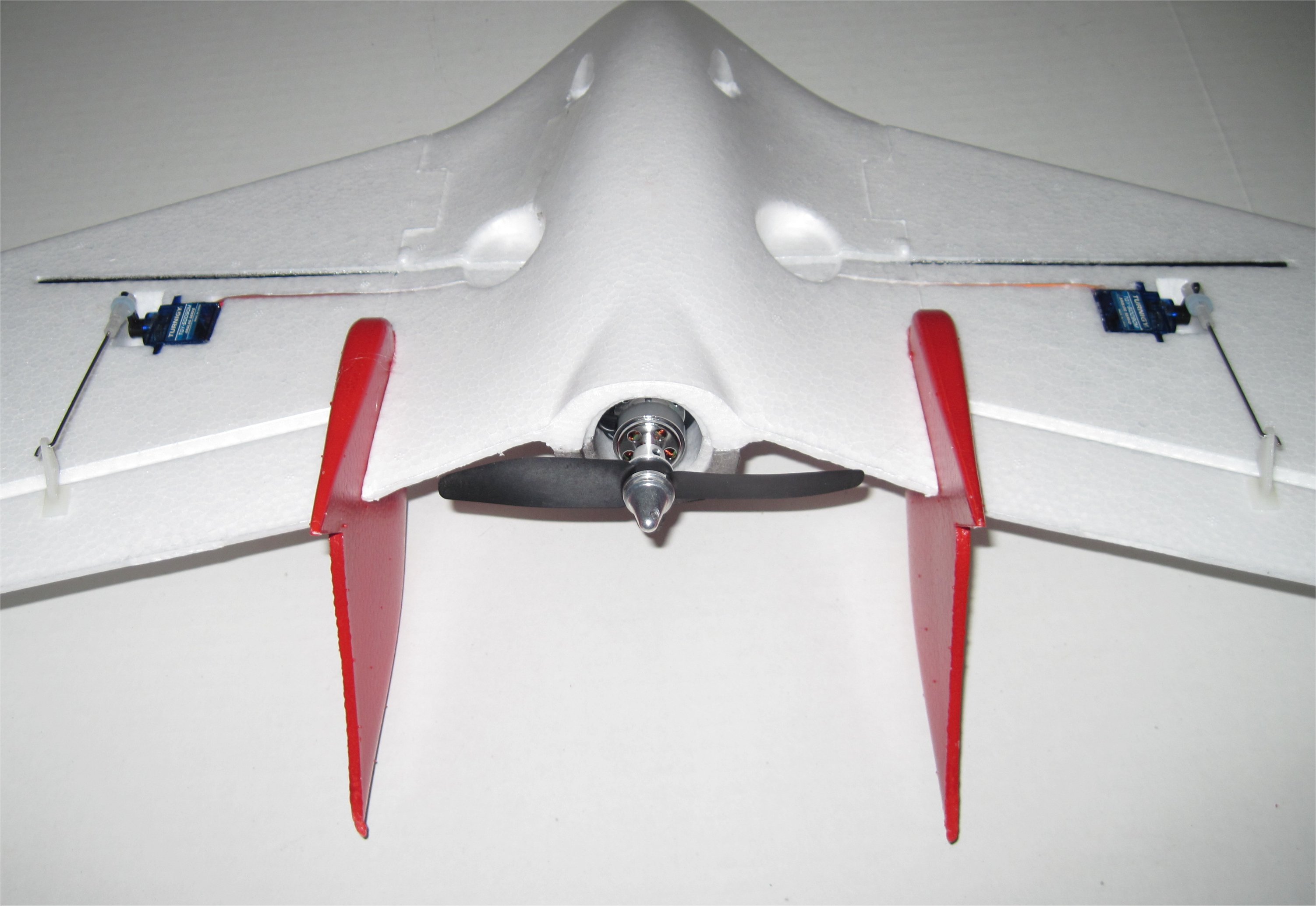
I am converting the fun little Wing Wing Z-84 first to use APM Plane and then to a QuadPlane. It will be a fun project using smaller and lighter components than my previous conversions and help to keep away the winter doldrums. Feel free to add your own build differences here or post questions. This is an open build thread for anyone interested in converting the Wing Wing Z-84 into a QuadPlane.
Here is a list of my component selections. Many of the choices are from U.S. based warehouses for easier shipping to me.
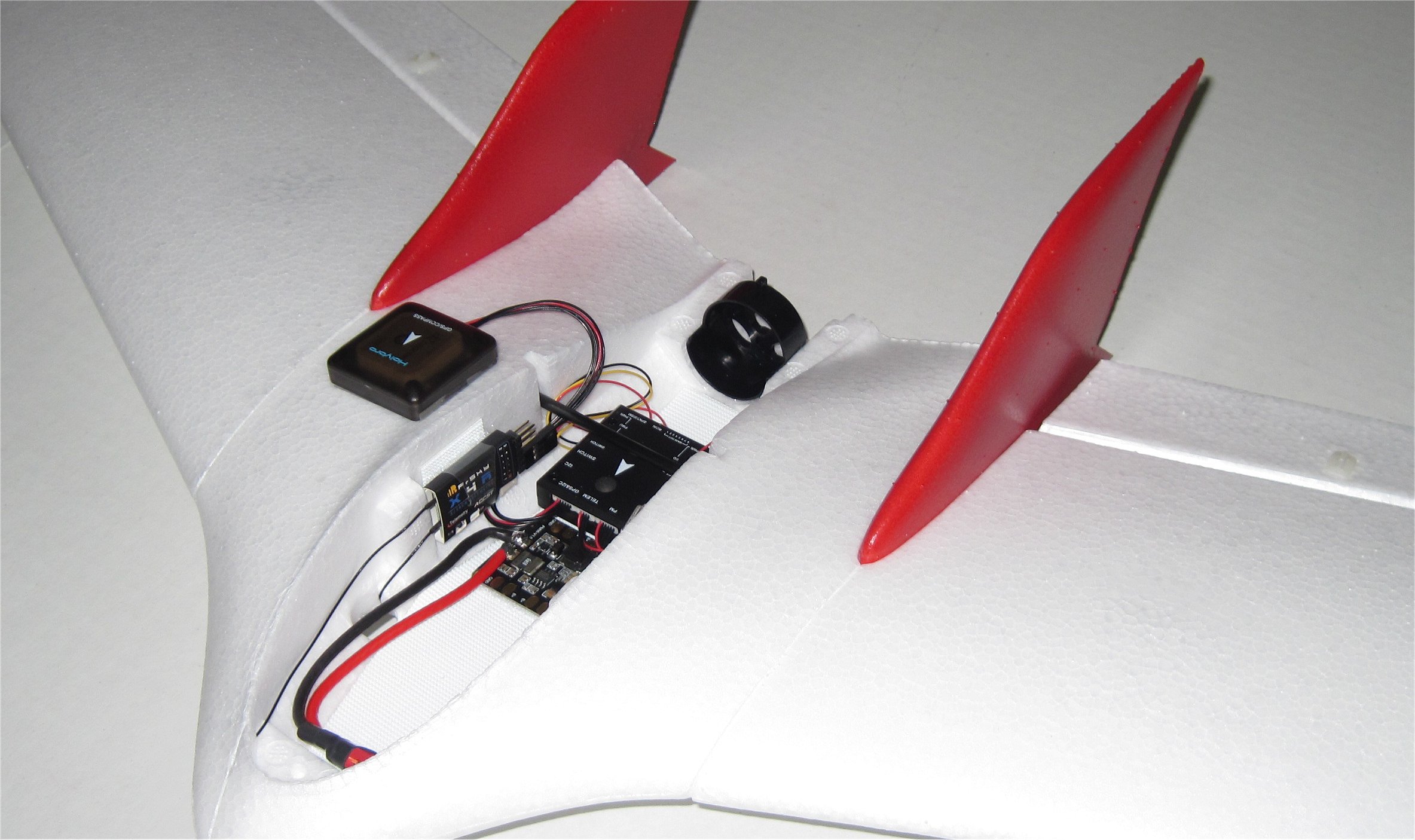
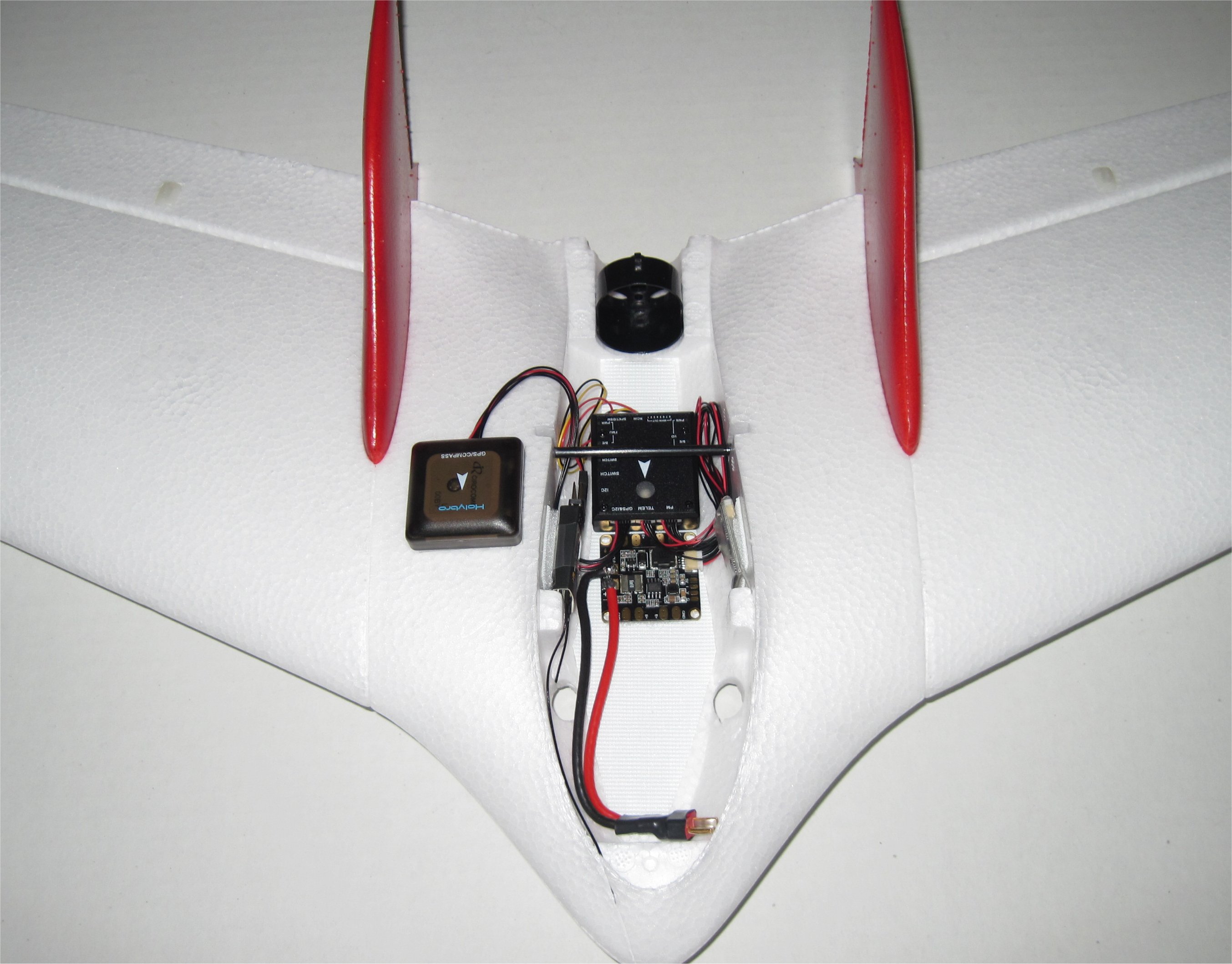
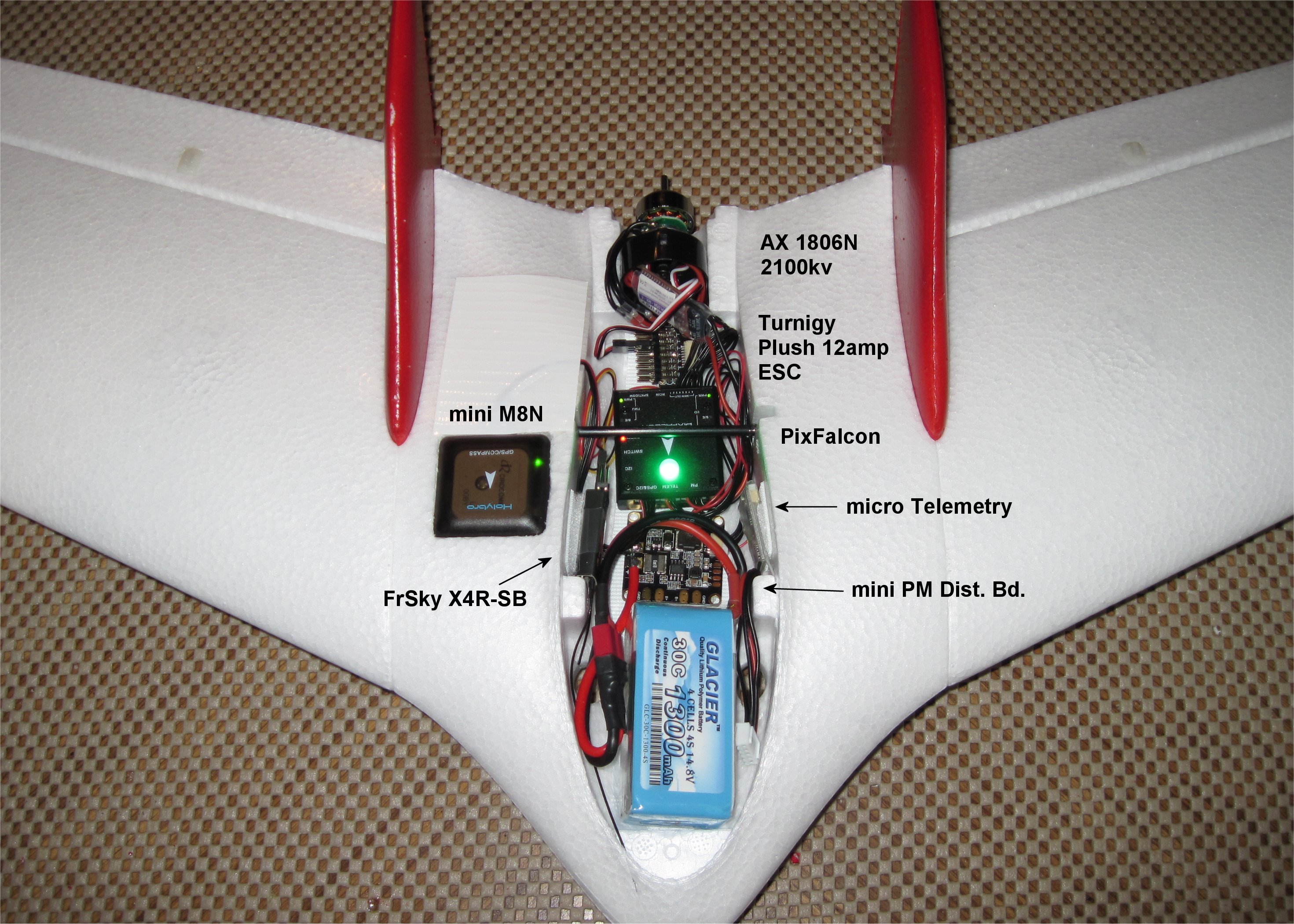
For the initial build, I used Beacon Foam-Tac to glue everything together and to help keep the elevon control horns secure. One of my more interesting finds was the HolyBro PixFalcon Combo set. It comes with everything you need including the cables that are all plug-n-play! Unlike the Pixracer that has only 6 outputs, the PixFalcon has 8 outputs which are needed for a QuadPlane conversion.
When flying by site, the Z-84 gets small fast so I kept it relatively close. I started out in Manual Mode, adjusted the elevator a bit, and then went right to FBWA mode for a great maiden flight in some wind! The SERVO_AUTO_TRIM feature enables automatic servo trim in flight. Servos will be trimed in stabilized flight modes when the aircraft is close to level. It works great!
That’s exactly right! I had four 250-size quads and disassembled two of them. The higher power quad weighed 21oz with a 4oz 3s 1300mAh 30C pack so I know that was my minimal lift capability. Since my Wing Z-84 had its maiden plane flight at 15oz using the same pack, I plan to use the lighter quad power system that has 14oz minimum lift. Overall, I think keeping it light will provide a better solution.
It´s a Phantom,First Phantom FX 61 VTOL
I had horrible weather to test but now I´m in spring and good weather and time to fly is coming, I need little more quad tunning and go to transition, some new test today to try to tune alt controller.
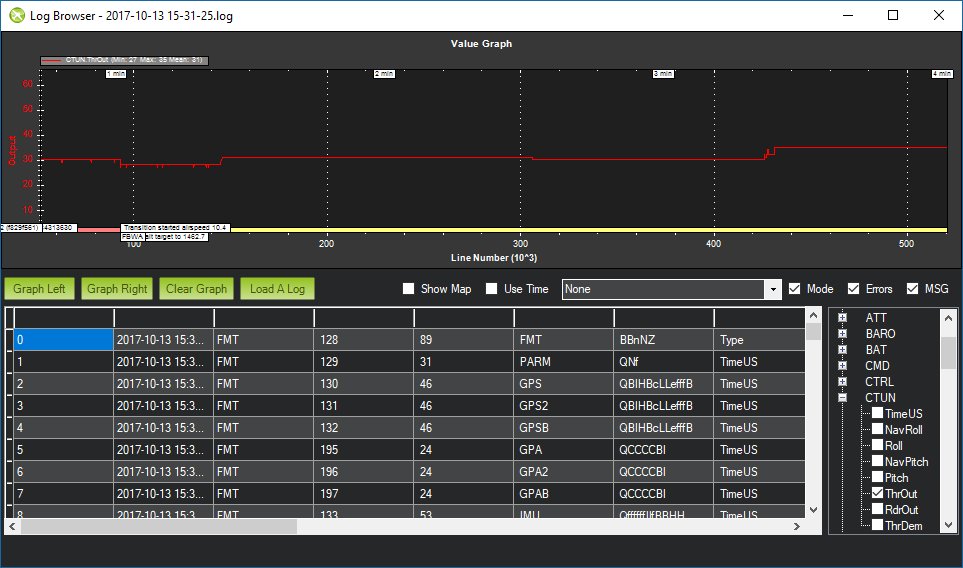
It looks like I am still having problems with vibration. I added another layer of Velcro but my Z-84 continues to flutter in wind. This is the partial vibration plot from the log below when I was in AUTO TUNE mode. Is it the Z axis that looks too high for vibrations?
The Z-84 is flying well except for pitch flutter in wind. I think my next thing to try is to replace the Velcro mount under the PixFalcon with several layers of servo tape. There isn’t sufficient room to install a normal anti-vibration mount because the carbon bar limits the height of the PixFalcon. Let me know if you have any suggestions…thanks!
Normally roll and pitch PID value are same in Copter, but I experiences in quadplane roll and pitch PID valuve are not same with each other.
5 ) when you test copter mode of quadplane at first time, to avoid damage of wing and structure, I suggest first use damy flying wing on copter fram with same weight as original. After proper pid setup you can test original wing.
I used first QLoiter flight mode for take off height, than Qhover for fev second than FBWA.
In Qloiter mode plane will not slip in air as like in Qhover.
For landing - fbwa to qhover, after speed zero again Qloiter for land.
I’d suggest adding mass to the PixFalcon, some lead weight, or an aluminum plate.
If you haven’t yet set Q_ENABLE=1, then I also suggest you set SCHED_LOOP_RATE=300, to match what it will be once its a quadplane. Then set SERVO_RATE=100 to increase the rate you write to the servos.
Once you’ve done that post a log of it flying and we can look at tuning.
Cheers, Tridge
Thanks for the suggestions. I’m not understanding the lead weight addition. It seems counter-intuitive to add weight on the FC and obstruct some of the LEDs. Can I try pressing some foam in between the FC and the carbon rod to press it down instead or does that not give the same added mass effect?
Adding mass is likely to make the biggest difference.
Think about it like this. Imagine a tiny piece of paper or plastic on top of a loudspeaker. Turn up the volume and it will bounce around a lot.
Now imagine that it had some lead attach to it. It would no longer bounce about unless you had a lot more volume on the loudspeaker.
Using good foam is nice, and worth doing, but you should add mass too.
Thanks for the suggestions. There are many alternatives to designing and testing the QuadPlane depending upon your goals. Mine is just one example. Normally, we don’t use the BEC on the ESC but for space limitations and small servos it can be a good compromise. It is true that Lithium Ion cell capacity is better for the same weight than Lithium Polymer and the 20 amp current delivery may work for small QuadPlane projects like the Wing Wing Z-84. It is easier to start with a pre-made LiPo pack than create your own Li-ion pack from cells as it requires special tools.
Perhaps we will see some other design variations here soon…







 ; Thank´s for share your great work Greg.
; Thank´s for share your great work Greg.


 All the best
All the best