
Flotation tests yesterday. Seems to float quite alright and we are now going forward with assembling the body. Note that this fuselage was the same one that crashed 3 months ago. We glued it back together for economic reasons 
1 Like
Hey people!
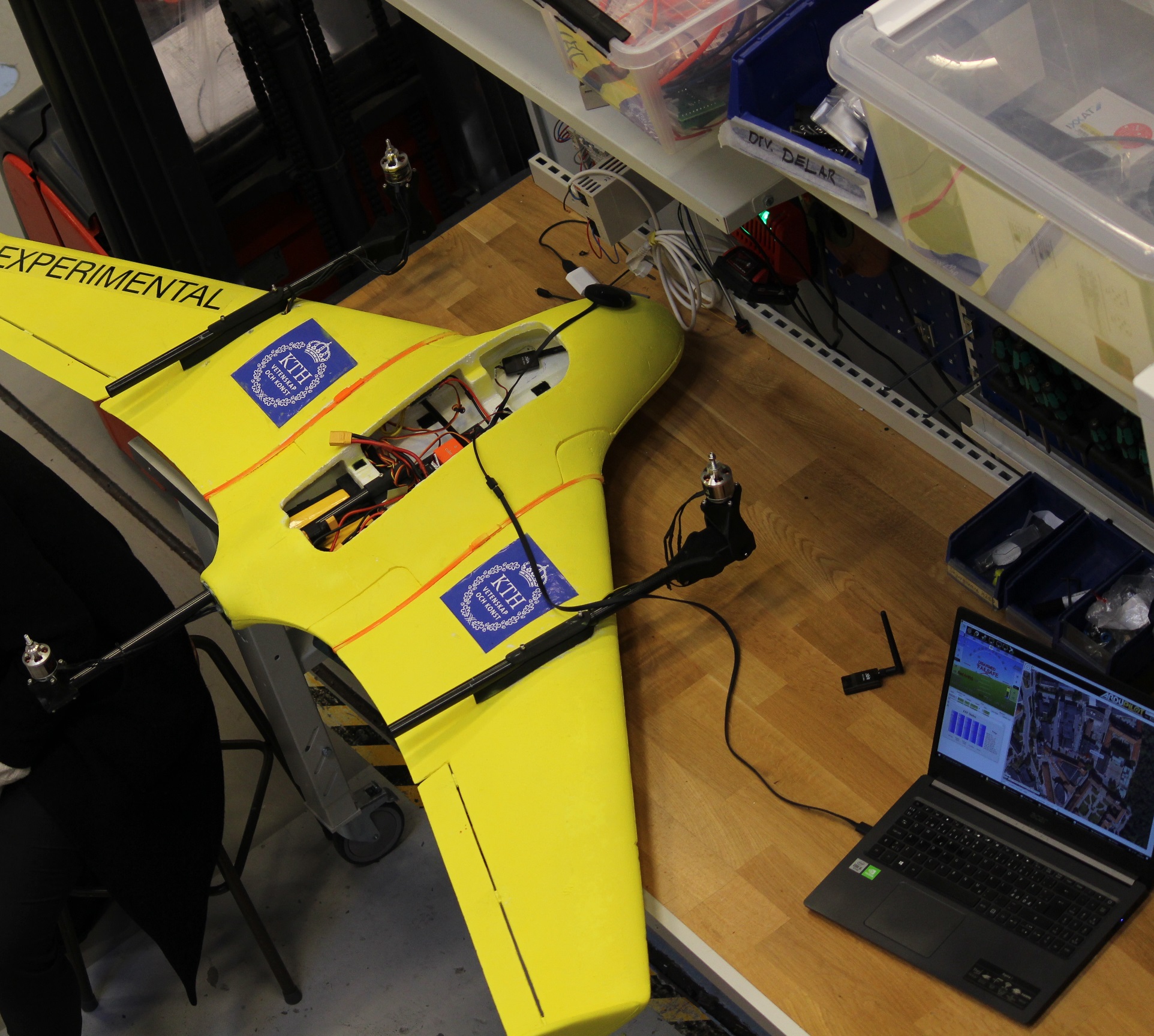
We’ve assembled our little prototype now along with a smaller C-1 Chaser based version of it to test forward flight and because its awesome 
We are encountering a lot of compass variance, which we believe is due to the power cables being just above the cube in the fuselage. We tested this by putting our phones in the fuselage and indeed it was turning the compass by up to 20 degrees. We have a second external compass, a here2 module, mounted in the front of the fuselage. We measured here as well and did not get any compass interference.
We tried to force the software to use the external compass and NOT to use the internal one but we simple couldn’t figure it out.
So to summarize; we have a problem with magnetic interference from the power cables.
Any tips and ideas for solving this are most welcome and will be tested!
We’re having trouble with our compasses. We’re running a cube orange with a here2 GNSS module. We can’t seem to get them to calibrate and have a lot of compass variance errors. We initially assumed it was due to magnetic interference from the power cables and thus moved them far away from the cube but this has not corrected the issue (although we ended up with a nicer cabling setup).
If anyone has experience with this I’d love to hear it. At this point we are trying anything 
are you ouside with GPS lock and away from metal? Strictly you should empty pockets of phone keys ect also. if one is not calibrating you can always disable it.
1 Like
We have a metal container about 10 meters away. I’m assuming this could be terrible for the compass? I’ve also had my phone in my pocket and a laptop 2 m away. I think I haven’t realized how sensitive this equipment might actually be… Tomorrow I will empty my pockets and go to a field to test it out. I’ll get naked if I have to!
P.s. I’ve seen videos of people doing the calibration indoors and saying it turns out fine - are they wrong?
10 meters is probably fine, its the close stuff that is important. Indoors is sometimes fine, depends on what the building is made from. Outside will always be better, especial if the compasses are mounted in a less than ideal spot.
1 Like
Alrighty, thanks for your help Peter!
Do you have any experience with the pixhawk 2.1 + here2 module?
yes, should calibrate fine some times its necessary to disable the internal if the cube is near power wires. External should work fine.
1 Like
Thanks for the tips!
Hey!
We still seem to have the error of calibrating the compass. It reaches 99% and fails. We managed to calibrate it once using relaxed fitting, this was also our first try. Afterwards we failed each time at 99%.
We did not wear any metal, we were out in a park with no metal near by. All electronics were removed and at least 10m away.
If anyone has experience of issues like these I’d love to hear about it! I’ll update if we figure it out.
Thanks for the continuous support from the forum, you guys are the best.
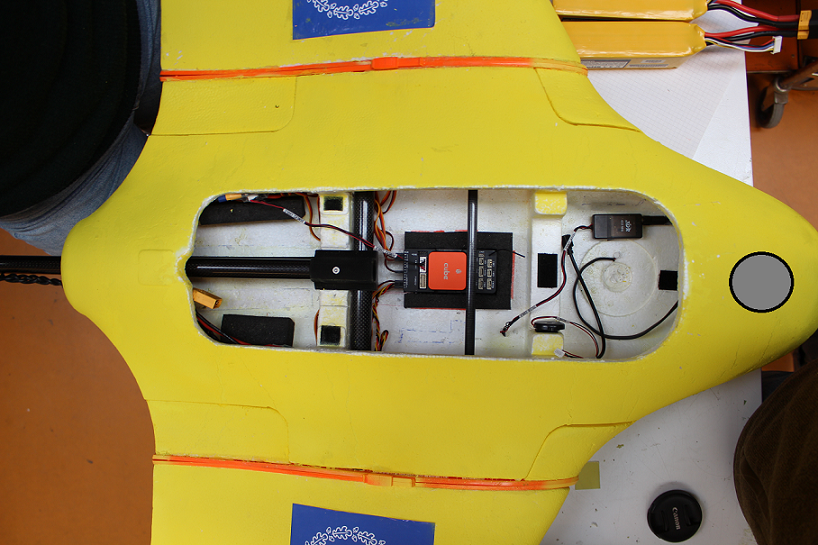
i guess the only thing left is mounting location, is it far from metal and it needs to be close to a rotation, ie some multiple of 90 deg in any axis in relation to the flight controller.
Hey Pete, its mounted in front of the cube, 20cm or so, with no electrical wires. Its also about 40 cm from two brushless motors. Could that be a problem? Note we do get bad calibration without motors running.
should be fine, can you post a pic.
should be fine, flat in pitch?
Yes sir. I will double check that today. Its mounted using velcro so I’m sure it moves a bit upon perturbation… I’ll fit it better today.
Yesterday was exciting! We flew for the first time from water . A big milestone in our project!


