Last one for now, do not want to spam the forum.
Thanks to everyone who has helped us along the way and for the tips you’ve given us. This was a big milestone for us!
Last one for now, do not want to spam the forum.
Thanks to everyone who has helped us along the way and for the tips you’ve given us. This was a big milestone for us!
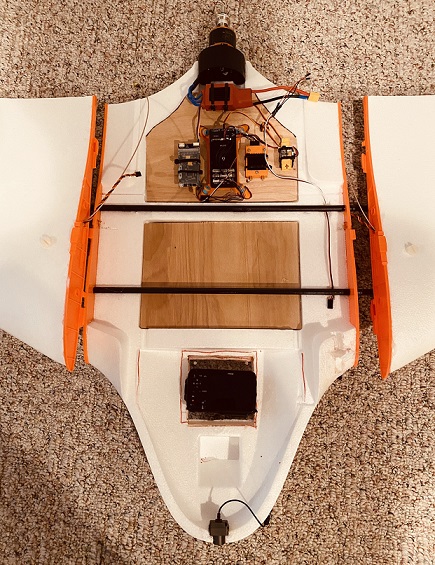
When we flew we could hear and see the plane oscillating around its yaw axis due to the motors spinning up and down. The plane uses vectored thrust when in FBWA to control yaw. Has anyone experienced anything similar?
Hey, we uploaded our BIN file from the flight here! We transition from Qhover to FBWA around 18:39
Edit: I forgot to mention that we never actually fully transitioned to fbwa
We have an issue with the plane not behaving as we want. Its all over the place and feels sluggish, unstable and unsafe. I had not changed anything since the last flight which was a success. I have theories that the ESC’s that we put in gel to isolate them from water might have been damaged or become damaged by the gel. We’re replacing them and going for a flight asap.
My biggest fear is that the pixhawk suffered from water damage during the test but I don’t think we’d even be able to get up in the air if that we’re to be the case.
Never mind, the issue seems to lie in the conductivity of the ESCs due to the gel. Its kind of strange and we’re gonna do more tests to confirm this.
Just saw your post. I am finishing a SkyWalker myself but not as a VTOL. Looks like your project is moving along…
Hi yes!
We’re about 6 months in, going for a test flight tomorrow. 
Do you have pictures of your project?
Kungsfiskare Awesome!!! Your design is good. Great job by you guys!
I have pushed the SkyWalker X8 and its on Steroids now;

Kungsfiskare I just converted your bin file to KMZ…Flying over water very cool…keep me posted and tag me with your updates. I am interested…
Are you using a ferrite choke around the wires connecting to your ESC? if not, use one. It will eliminate all noise coming back from the motor to FC.
You need any tips or help let me know and Good luck tomorrow!!!
Looks so professional!
Yes we have the rings on the esc! I didn’t know that they do that  . We have a Compass variance error but otherwise the build seems fairly steady!
. We have a Compass variance error but otherwise the build seems fairly steady!
Will keep you updated, and awesome build!
What GPS are you using?
read this https://ardupilot.org/copter/docs/common-compass-setup-advanced.html
Here2 GNSS… We’ve tried everything and can’t seem to make it accurate enough
There seems to be known issues with this GPS. Are you using serial or CAN port? If serial switch to CAN Port.
here is how you do it.
also tagging Ian @MadRC he knows these GPS better than I do.
Thank you! Yes we have previously switched to the CAN port and have switched the physical switch inside the module too. It still gives us crazy variance issues… I’ll look at the video later today when I’m in the lab to see if there’s anything we can try
Ok cool. Else consider trying another brand of GPS.
I have seen a bulletin by Profinc about Cube issues. Let me see if I can find it. Stay tuned
oh wow, this is a lot of info. I will for sure look into this and see if we can resolve our issue. Thank you so much for being so helpful! I will report back on the results
If there’s anything you need help with please let us know!
Yesssss. make this baby cruise over the ocean…
Which ever way it goes today we’ll upload the footage 
Also, what mixing gain do you use? I feel 0.5 does not give enough authority…