You initialize and take off over metal … Good luck !
When you try to have an UAS license you could learn for example that metal could disturb compass …
I remembered seen a lot of crash with first dji aircraft taking off over manhole cover 
Lol yeah we know. In these videos it has been initialized on the concrete, which isn’t good either due to the rebar, but we’re only doing simple tests without GPS positioning (no loiter yet) so we thought it might be fine.
Were we wrong?
Bit of a pause as I crashed the last plane hard into the ground. We’re rebuilding everything once again so it’s moving a bit slower.
Will update with video!
Hey, is FLTMODE 22 autotune? When we change into it we enter QHOVER.
Thanks!
Heres our latest Crash…
We were experimenting with the autotune function. Here we have the tlogs from the flight.
We put the autotune flight mode in place of manual, as we never enter manual with the current configuration. According to the data the pilot never entered the autotune mode but instead returned to Qstabilize from Qloiter. This is what is seen in the video.
Has anyone got a clue about what it could be and/or experienced this kind of behavior with Qstabilize/Qloiter?
proper on-board logs are more useful than tlogs if you have them, look like it was not tuned well enough to start autotune.
https://ardupilot.org/copter/docs/tuning-process-instructions.html#evaluating-the-aircraft-tune
Our pixhawk doesn’t seem to be saving board logs… I’ve looked at the parameters but cant seem to find the issue…
If anyone has time, I am encountering this issue:
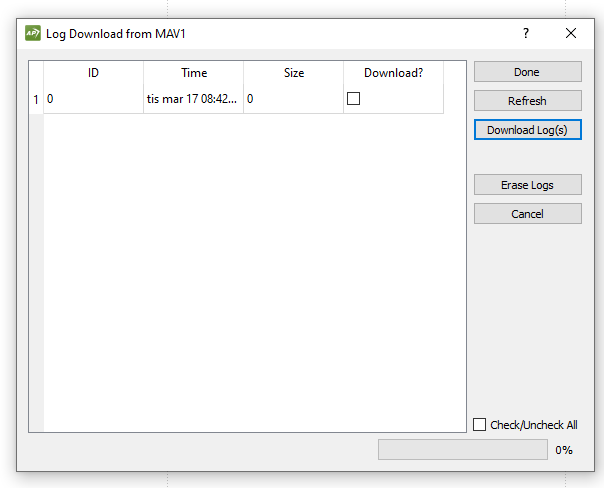
This is all I see when I go to download the logs.
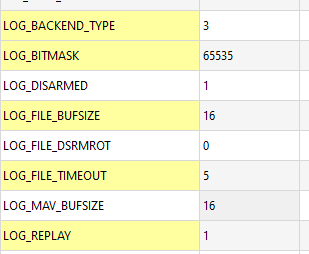
These are our parameter settings.
Thanks
Hello!
We have flown our test rig all day to test QAutotune. We did not see any change when we flew in QAutotune compared to Qhover. We figured it was due to the deadzone being too small so we increased that to 6%. Still no autotuning.
We’re running ArduPlane 4.0.5 which when we checked recently was the latest stable firmware. We saw that Q_AUTOTUNE_AXIS was only available on 4.1.0DEV - is all QPlane autotuning only on 4.1.0 fw?
Also, bin our bin files wont save… Every time we check for them there’s only one available with a 0kb size. Anyone with similar errors?
Tested: Qhover, PID’s and Qautotune.
Last night we were out until late doing tests. It behaves fine but we get some errors
- Bad AHRS error
- Sometimes bad GPS
- In Qloiter it is prone to flipping when performing roll maneuver
Here are the .bin files from last night and here is the one where we crash along with the video of it going down. We’ve encountered this behavior a few times before, I’d say half of the times we fly in qloiter end up upside down 
 .
.
Anyone with any ideas?
A thing to note is that we could not flip it in Qhover but it is happy to do barrel rolls in Qloiter.
Is Q_ANGLE_MAX still active in Qloiter? Are there different PIDs for qloiter which could be the issue?
Thank you all
Ok, we found Q_LOIT_ANG_MAX and it was higher than our Q_ANGLE_MAX. We’ve lowered and are going for another try.
Things that we are testing now are
- Q_LOIT_ACC_MAX
- Q_LOIT_ANG_MAX
- Q_LOIT_BRK_ACCEL
- Q_LOIT_BRK_DELAY
- Q_LOIT_BRK_JERK
- Q_LOIT_SPEED
Will report back

Hallo
Is the hover stable without using GPS on qhover or qstabilize mode? I have a plan to build vtol without GPS module. Thanks you
1 Like
Yes but it drifts in the horizontal plane 
Hello everyone!
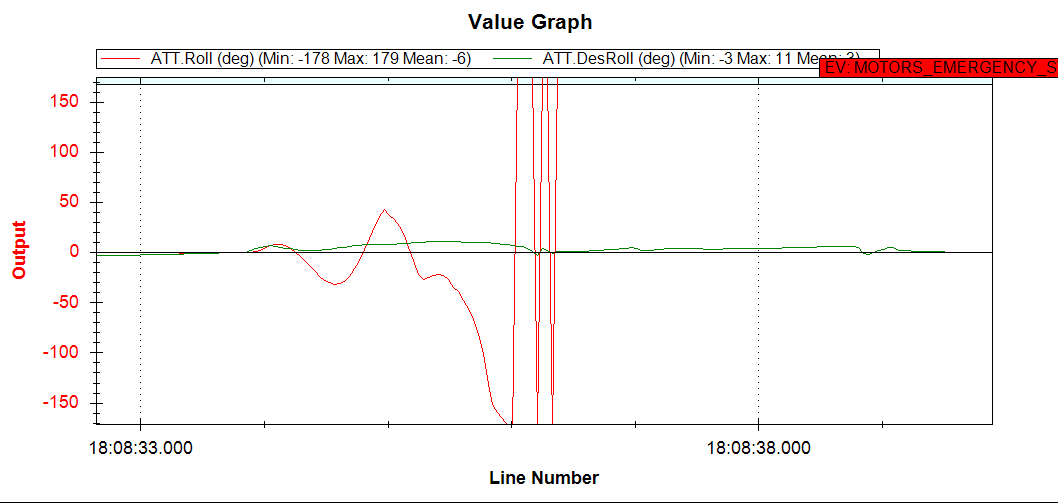
Today we updated to 4.1.0 fw and went for an autotune. It performed pretty good in yaw which left us excited to try another axis. Roll has been a troubling thing for us and thus we decided to go for that.
The rig crashed each time we tried to go for a roll autotune.
Videos here and log from the final flight (Qautotune of roll) here.
We would really appreciate any help and input from anyone with more experience!
Hey!
We believe our issue of the excessive rolling is due to the ESC’s not being calibrated properly. They were set for a slow spool up as they’re helicopter ESC’s.
We’ve changed this and are going for a test flight later in the day.
hugs and kisses
ESC’s were absolutely the issue. We are just about done with the test rig and are now shifting focus on to the x8 body again. We’re planning on taking off from water within a month.
Good to know that you guys have figured out the issue. Best of luck with the next tests.
Cheers:)
1 Like