We’re currently working on converting the X8 frame to a VTOL prototype. I thought we’d share our journey and learning to hopefully help someone who wants to do something similar in the future!
We’re a student team in Sweden with, initially, very limited ardupilot knowledge. Over the past months (Oktober 2019 to February 2020) we’ve been slowly learning and have now achieved flight with two airframes, one bi- and one tri-copter, both based on the X8 airframe.
This was our initial idea and after our first test flight (January 23 2019) we realized it was very sensitive to crosswind. Thus a choice was made to create a version with tri-copter configuration.
After a pretty bad testflight (February 7, 2020), where the upon thrusting up - the plane flipped and broke two props, we returned to the drawing board. After reading on the forums we realized our setup was almost identical to the Nimbus 1800. Both planes controlled their yaw in the same way and we were therefore able to look at the parameters from a user in the Nimbus thread. We played with the parameters and achieved a stable flight (February 13, 2020). We’re still fine tuning everything and will upload the parameter list when we feel it is stable enough.
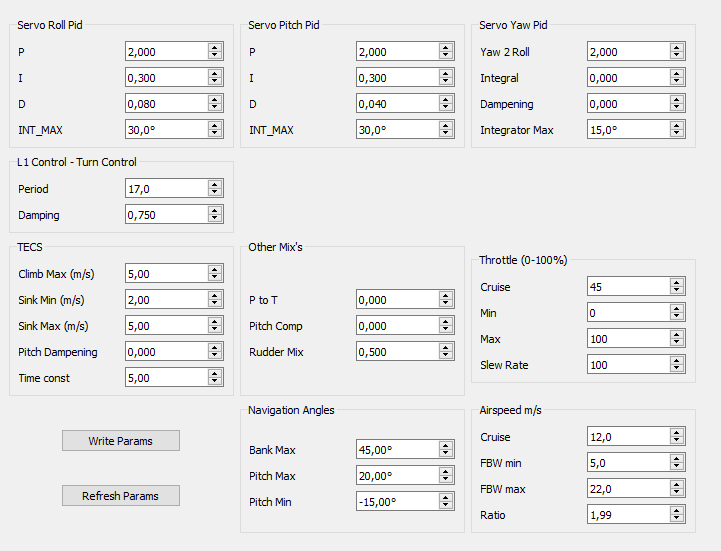
We’re currently flying it in our workshop. We experience a really high and rapid response when we try to roll in QStab. Does anyone know which parameters are the PID’s for the roll/pitch/yaw in Qstab?
Last night we managed to tune the roll,pitch and yaw to a point where it was quite pleasant to fly. The throttle response is a little quick and I’d like it to be a little smoother.
Here’s a video of last nights flight(2020-02-17). It behaves way better than the night before. We put 13" props on instead of 11 which let us actually get of the ground and hover outside of the ground effect.
Is there a parameter to limit roll angle? For example Roll_angle_max: ±30 degrees.
For now I’ve put in Q_A_RATE_R_MAX = 360 to limit the angular velocity of the plane in hover mode but I’d like to stop the pilot if he/she tries to go past a certain point.
Yesterdays hover test. Currently we have about 4-5 minutes of flight time in Q_modes. We’re planning on testing the auto tune function this monday or tuesday to see if we’ll get even better behavior.
The right servo is broken in this video, which was noticed after the flight. It caused an oscillation along the wingspan. We’re repairing the plane now as in this video it was held together by duct tape and hopes.