The .param file you attached is for using the Pixhawk outputs from the MFE documentation. The outputs do not match my DIY version so you need to choose which setup you want to follow.
Also, be sure that the safety switch has been activated so that the servo outputs can follow your R/C input controls.
I had a crash today. I would like to share to you the video, parameters and the log. We were doing a auto mission, and the plane crashed while transition. The communication with the plane lost in the air, couldn’t figure out the reason. Tried to change mode to qhover but the plane was not responding. Hope someone can figure out what happened so we fix the mistake.
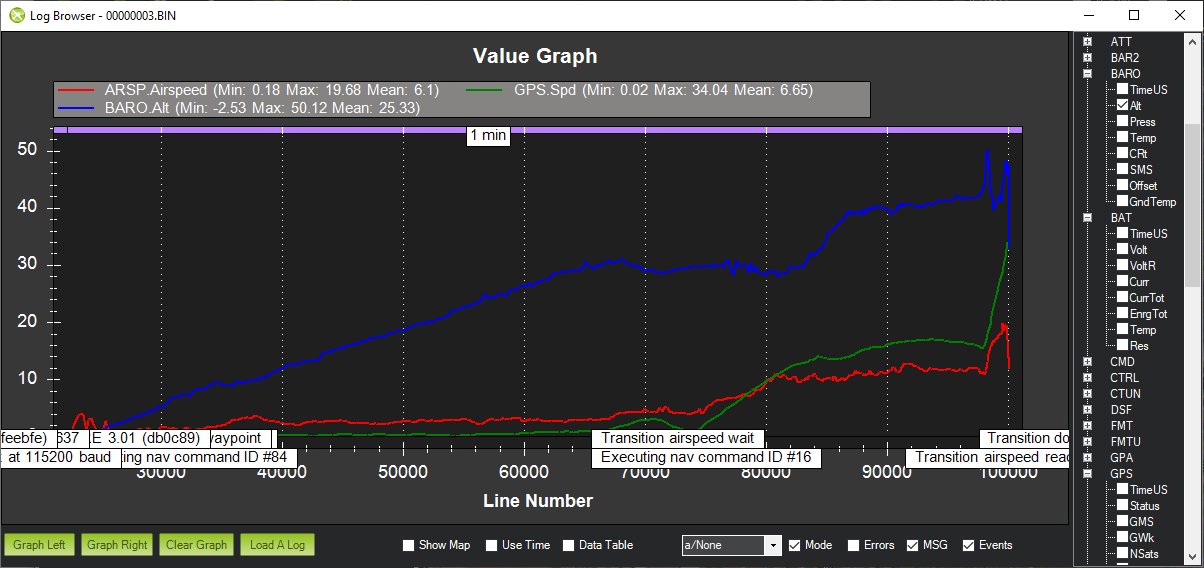
I am sorry to hear about your plane crash. I did a cursory check of your log and suspect that it stalled in flight. The air speed was lower than the ground speed which suggests a tail wind or perhaps an uncalibrated sensor. Since your ARSPD Min/Max values were 12-26 m/s, I also suspect that maybe your throttle was set to minimum instead of mid-stick. However, I am not certain if this matters in AUTO mode since I haven’t used it in a few years.
Lastly, your Q_ASSIST_SPEED setting was 0 so the plane could not save itself on a stall. This setting should be at the stall speed of 10m/s for safety.
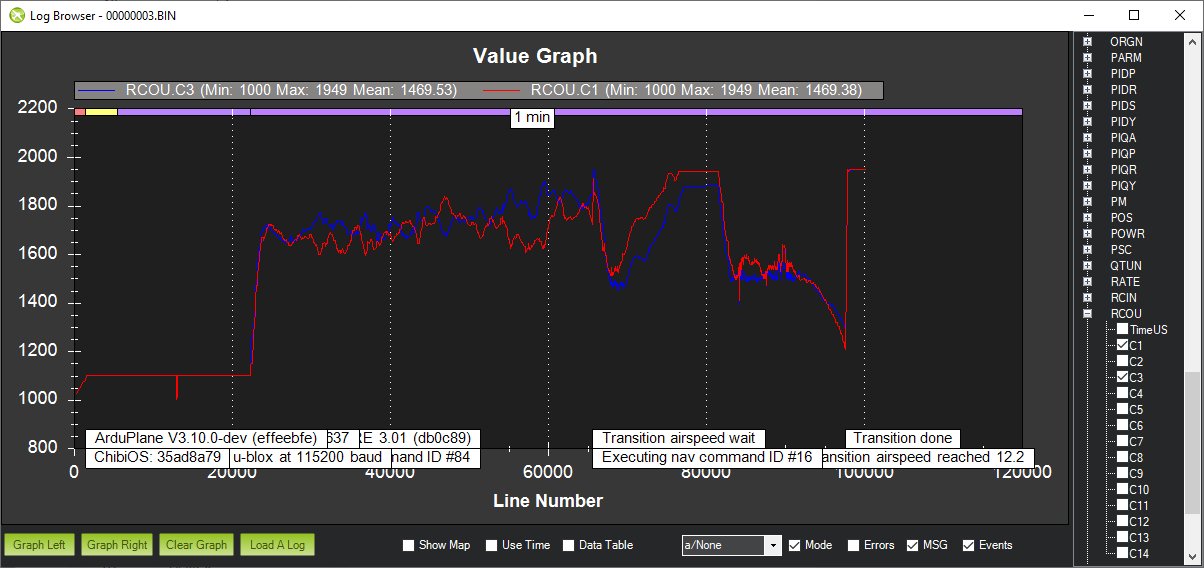
Thanks for reply. The throttle was always mid-stick through the whole thing. But that shouldn’t make a difference in auto mode I believe. The vehicle had a slight side wind during transition and yes I also suspect that the airspeed sensors calibration was off. Using sdp33 sensor. Recently changed from 5520. But the parameters of the previous airspeed sensor was on with some offset. I believe that was the major problem. But I didn’t understand why the throttle command is not %100 through the transition? Is that normal? Can you give a look?
But I’m not sure if the battery expolsion was after or before the crash. I suspect that because the log and the video transmission stops mid air. I’m pretty sure I switched to qhover flight mode before crash but I can’t see that in the logs. Thats a custom made 6S8p battery btw.
Your throttle stick setting was at the mid-position so that was not an issue. When the transition was completed, both Motor 1 and Motor 3 rev’d up to full power and the current draw increase showed that it was drawing full current to both motors. However, if the plane had already stalled, it may not have helped. It really needed to go into the Q_ASSIST_SPEED safety mode. This should have been tested before doing an AUTO flight. I always stall test fly my VTOLs at a high altitude by lowering the throttle in FBWA mode. It gives you peace of mind that the plane can save itself.
Awesome build, i was wondering if you can share a log file with a successful build. I am trying to build one, but i have some tuning problems, like the tilting motors are moving to little when I change from manual to qstab. Cheers !
It sounds more like you want a .param file. I can easily attach one below. Remember that I am using the MFE custom build below so there are new parameters visible not in the normal release code. We went through those above. Good luck!
@GregCovey
Hey Greg…been a while…Hope you don’t mind but I had a question. Not specifically for the Freeman but I assume it would apply. So here goes. When the lift motors, non tilting ones finish their task and stop. How do you keep the props from spinning wildly and causing unwanted drag.
I’ve never had that issue. Sometimes, the prop will turn slowly but typically not at all. It has never spun fast enough to cause an issue, even with our 18" props. Perhaps when the ESC is powered, but the motor is off, there is some residual force keeping it from spinning wildly.
TLDR; I’m joining the fun and I have two (one kit and one PNP) Freeman 2100 on the way.
It took me a while, but I finally finished reading this thread.
As I’ve mentioned in the Fighter 4+1 thread, I purchased a Fighter kit last week from Banggood. When I placed the order for the Fighter kit, I also ordered a Believer kit. I’ve wanted a Believer ever since seeing ArxangelRC’s review of the airplane. My plan was to modify the Believer into a tilt rotor quad plane. I figured the Fighter would help learn how to build and fly a quad plane and I could use what I learn to make my Believer quad plane.
I obviously hadn’t done enough research since I soon learned the Freeman is a modified Believer. I was fortunate that Banggood hadn’t shipped the Believer yet so I cancelled that order and ordered a Freeman kit and “PNP” from AliExpress. From reading this thread, I understand the “PNP” version is really a kit which includes the motors, servos and some electronics.
Thanks to everyone here for sharing their experiences. I feel bad for those of you who have had serious crashes. Thanks for letting us know what happened so we can hopefully avoid the same problems.
In case anyone is interested, I’ve posted some info about my MFE Fighter 4+1 build in this thread. I find these very long threads a bit awkward to navigate and I didn’t want to dilute the excellent information in the main MFE Fighter 4+1 thread so I started a new thread to post my updates and ask questions. I’ll need to figure out where I’ll document my MFE Freeman build. This (excellent) thread is also so long it’s hard to scroll quickly through the thread.
The main difference between a normal servo and a “robot” servo is a robot servo includes a pivot point opposite of the servo horn. A robot servo is designed to be a joint in a limb rather than pulling and pushing a push rod.
Normal servos can be used as robot servos but this usually requires a pivot point be added to the bottom of the servo. My first attempt at making a robotic hexapod used normal 9g hobby servos (and Popsicle sticks). I added Lego turntable pieces to the bottom of the servos in order to make the servos behave better as limb joints.
I’ll pretend like building robots is somehow related to this topic so I have an excuse to share this video. This is one of many land based robots I’d like to figure out how to control using ArduRover.
Some robot servos use a serial protocol for communication. Dynamixel makes a bunch of different high power robot servos (called Robotis Actuators). You can’t use a normal servo pulse to control Robotis Actuators. These servos are controlled with a serial protocol. I’ve seen mention of these servos in the ArduPilot Wiki so using these more advanced robot servos is an option in ArduPilot projects.
Really good explanation and very cool hexapod there! Have been on my have-to-do-list-…-later for many years.
We went for the DS-servo RDS3115MG 15kg 180 degrees biaxial servos to the Freeman 2300.
The VTOL is complete and the next step is the firmware. This thread is 460+ messages long… Instead of reading the hole thread are there a faster way to find out what firmware to choose and if there are any latest parameter-file?
Using the Hex ProfiCNC Pixhawk 2.1 and Here+ GNSS RTK, Mauch-stuff for power, front motors T-Motor AT3520 50E 550KV, rear motors T-Motor MN4019-9 400KV and so on. Total weight with LiPo and no camera = 5,9 kg. Camera is around 400 grams.

 !
! Hope this will make my life easier. thanks again , really helpful to have a param list that works fine.
Hope this will make my life easier. thanks again , really helpful to have a param list that works fine.