just tested again. YAW swing still there, a little less maybe, but still massive. Q_TILT_MAX is 35. I will try MFE firmware next or eventually lowering Q_TILT_MAX
ps: i tried to raise LIM_ROLL_CD since circles in FBWA are waaay too large, but it seems it hasn’t raised max bank angle.
other noteworthy note: when around 28-30m/s ailerons and elevons begin to twist at a point that they become uneffective, so there’s a bit of a structural issue there
Try increasing the MIXING_GAIN. Since you didn’t post a .bin file, I cannot tell what yours is set to. The setting can go up to 1.2 and I normally have it set between 1.0 and 1.2.
tried MFE firmware, YAW swing almost gone! also now i have a pretty decent bank angle in FBWA. Now it’s turn to improve general pids and such, but at least i have a tunable system, i can complete a whole flight with transitions without big troubles (finger crossed). However, It looks weird to me that such a bug (yaw swing) is still in the code, while guys somewhere in shenzen fixed that one year ago…
I moved to a fighter 4+1 before I finished my Freeman build. It’s for sale on eBay if anyone is interested in aquiring a PNP Freeman 2300 kit. https://www.ebay.com/itm/274686222737
Thanks,
Hi all! I have a question regarding the x3520 motors. Do you use a ccw prop adapter on the ccw front motor? If yes, any recommendations where to get them?
I used 6mm nyloc nuts from Ace Hardware store instead of the screw-on cone adapters. I’ve never had one come loose on the stock CW adapters. The 6mm stock adapters fit the wooden props perfectly. At lease my memory thinks they are 6mm so please re-confirm.
Thanks for clarification! So I’ll go with nyloc nuts with my Apc props, too. They also have a 6mm hole and with the washer in between I can’t loosen it with my hands. BTW I followed your advice regarding the distance bolts and use 12mm metal hex diststance spacers, they fit nicely!
new here on the channel. I am having trouble to load the custom firmware to my Orange cube as well. Have you found a solution to this yet.
I can do all the hardware stuff… but software (pixhawk) is not strong point LOL.
Hi Drone_on. Loading firmware is no effort, just follow the instruction you can find in the ardupilot docs. basically:
0) (use a Win10 pc with decent chipset and performance, not a too old one)
download mission planner
connect cube orange with supplied usb cable (important)
let driver recognize it, you should find it in device manager with a new COM port
go to firmware section of mission planner, check that in the lower part it says something like “detected H7 cube on COMx” etc (it’s longer than that)
click on “custom firmware” link and select file for cube orange from the zip package from MFE github [unzip it first… :)]
upgrade should begin, with green progress bar. When finish, you must load parameter file, use .param from MFE package. Then you will have to modify some param to fine tune, but you can already fly with stock ones. IMPORTANT! AFTER loading param file, BEFORE FLIGHT, you must complete: 1) accelerometer calibration 2) level calibration 3) compass calibration 4) servo thorws calibration! Do not attemp to fly without doing those steps!!
Hi everyone!! my name is David and i’m sarting the build of one freeman 2100.
i have plenty of expertise building drones (multicopters), 3d printing and robotics.
i been reading this thread sincea couple of months but now i have all the thing (that i think) i need.
my question is approximately how much time took you to build this one.
thank you in advance.
I am read to take the plunge … maybe before I do I have a couple of questions for some of you on here.
Wiring first:
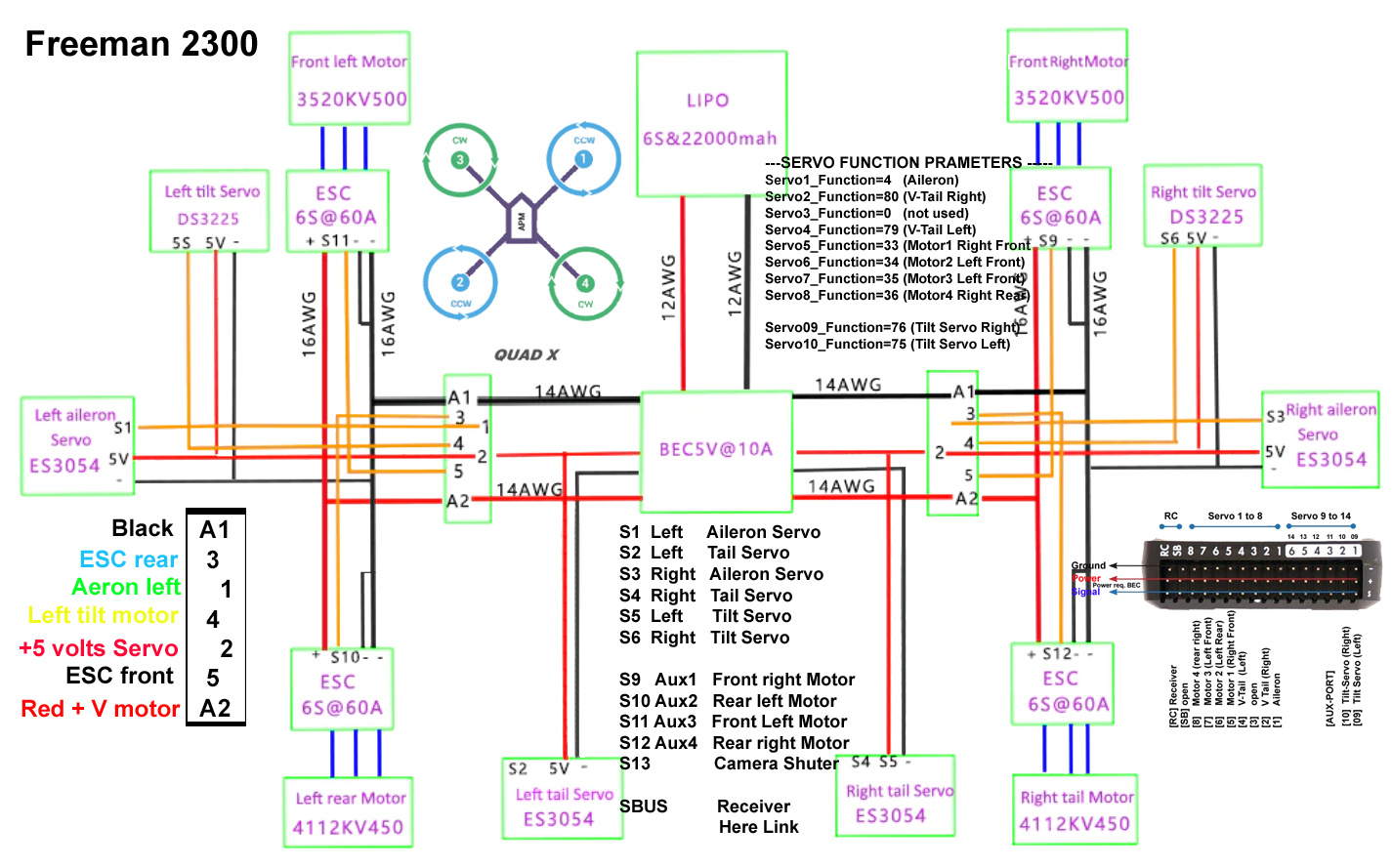
The orginal MFE wiring diagram shows to use two Ailerons left and right. Left should connect to Servo1 function and should plug into pixhawk port 1. While the right hand side aileron is only mentioned in the orginal wiring diagram to connect to Servo3 function… but all your diagram on here show it is going nowhere.
Do i have to use a Y-cable and connect the left and right aileron to the same port on the pixhawk FC, port 1?
I was able to load the MFE custom firmware, yes I am using a cube orange with ADSB. Every time I am trying to load the freeman 2300 parameter file the system is not functional. Rest param file and okay… Something is off here.
On that note has anyone tried to use a Herelink unit to fly the Freeman 2300?
The setup off the herelink is a little confusing
I have attached the wiring and other things I found online. Love to figure out which setup will work best.
No, you can set it up any way you like using the SERVOx_FUNCTION command. You can use a Y-cable connected to one output or connect a single aileron servo to a single output on the Pixhawk.
Not sure what “not functional” means. Can you post the .param file that you are trying to use?