I have found a crude fix. The main problem is more the camera case corner than the back plate. take off the camera back plate ( the camera PCB is held in place by the back carefull it is loose also dont let any dust in) file all four corners as in pic_1 & Pic_2
then re fit the filed plate then take off the case corners until it misses the yaw arm one file at a time until you get it right. Pic_4 is how I tested it works before modifying the back plate
Cant see any other way to fix the issue as the camera case corner needs to be filed as well as the back plate corner
Note: the camera case is not square 32mm x 30mm see Pic-3
wash the back plate after filing before refitting so as to remove any dust
What would be the recommended way to mount this to a Holybro x500 V2 frame? Is there a product that would allow me to connect it to the mounting rails? Or should I buy another payload platform board from Holybro (I’m using the one that came with the frame for a companion computer) and attach the A8 to that platform board? Would that work? Thanks in advance…
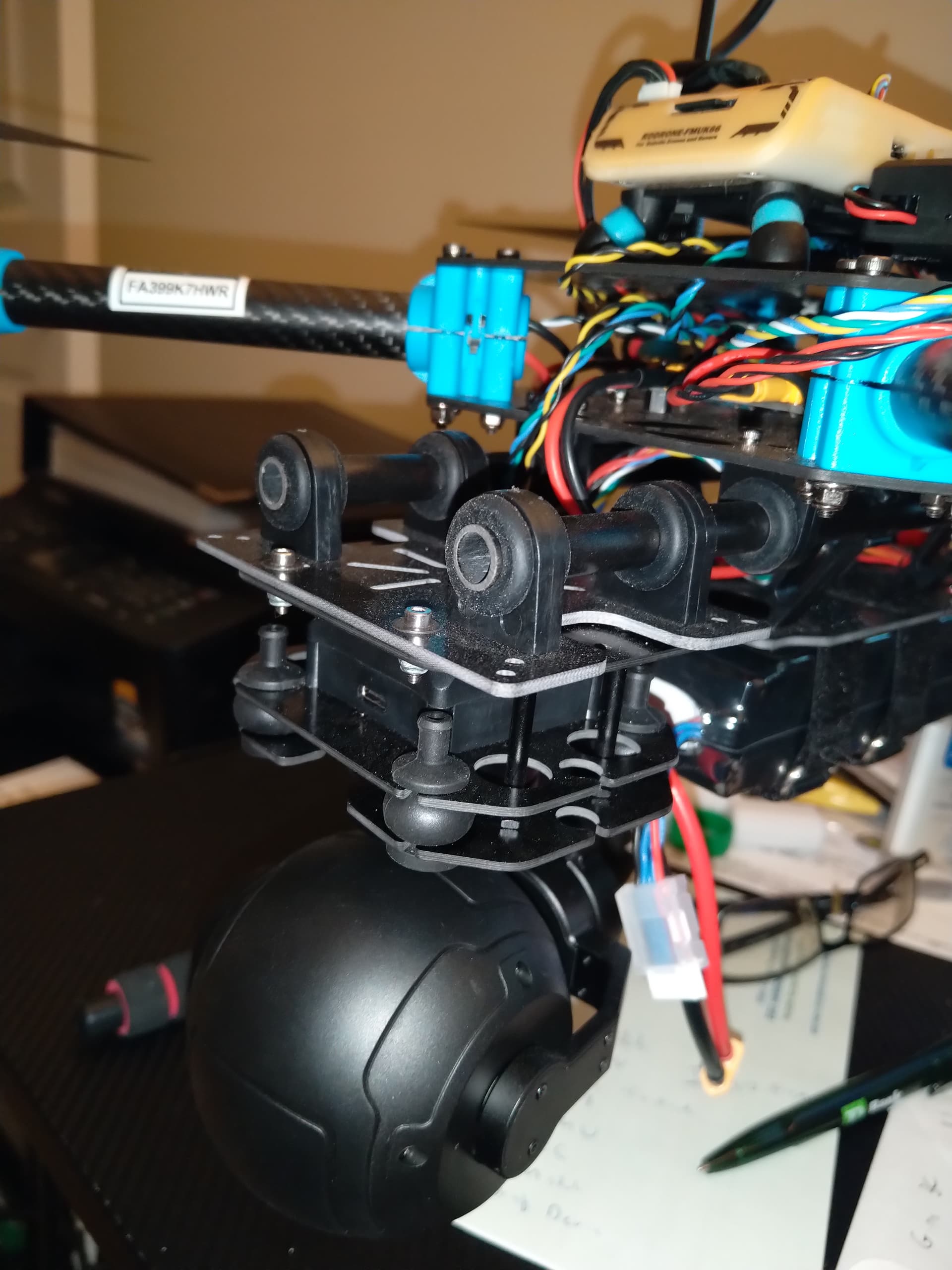
I have attached how I attached the larger ZR10 to my X500 V2 frame.
I have since ordered the new A8 camera/gimbal and the ZR10 will go on my new larger build.
Be careful and look at the input voltages needed by these cameras and plan for them in your build.
If you haven’t bought A8 mini, the videos will help you understand what items you will get.
If you have got A8 mini, there are still some useful information you may need
By the way, the latest 4.3.3-rc1 includes an ArduPilot bug fix to the start video recording feature. If beta testing goes as expected 4.3.3 will become the stable version in a week or two.
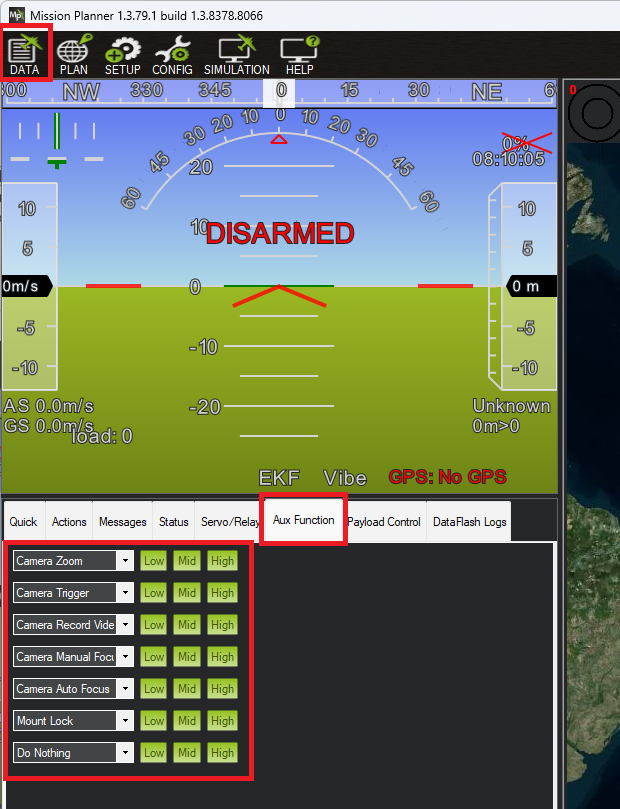
Although I may have mentioned it before, if you’re running out of transmitter switches to control all the gimbal and camera features, Mission Planner has a an “Aux Function” tab that can provide quick access to these features without setting up a switch.
Hi all. Please tell me what I’m doing wrong. I connect A8 to matek 743 wlite. Connected as in this manual SIYI ZR10, ZR30 and A8 Gimbals — Copter documentation. Axis control works fine, but zoom and recording do not work. The control signal is connected to the matek via a crossfire. Air unit is used only for video transmission. All firmware has been updated to the latest(ArduPlane4.3.2, Camera Firmware v0.1.7, Gimbal Firmware v0.1.8). When I try to use the Aux Function (Camera Zoom) in Mission Planer, I get an error “The Command failed to execute”. Thank for reply
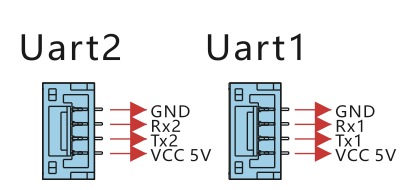
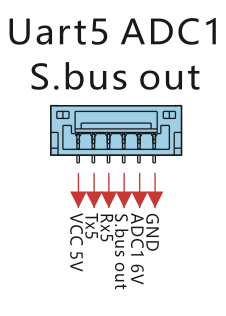
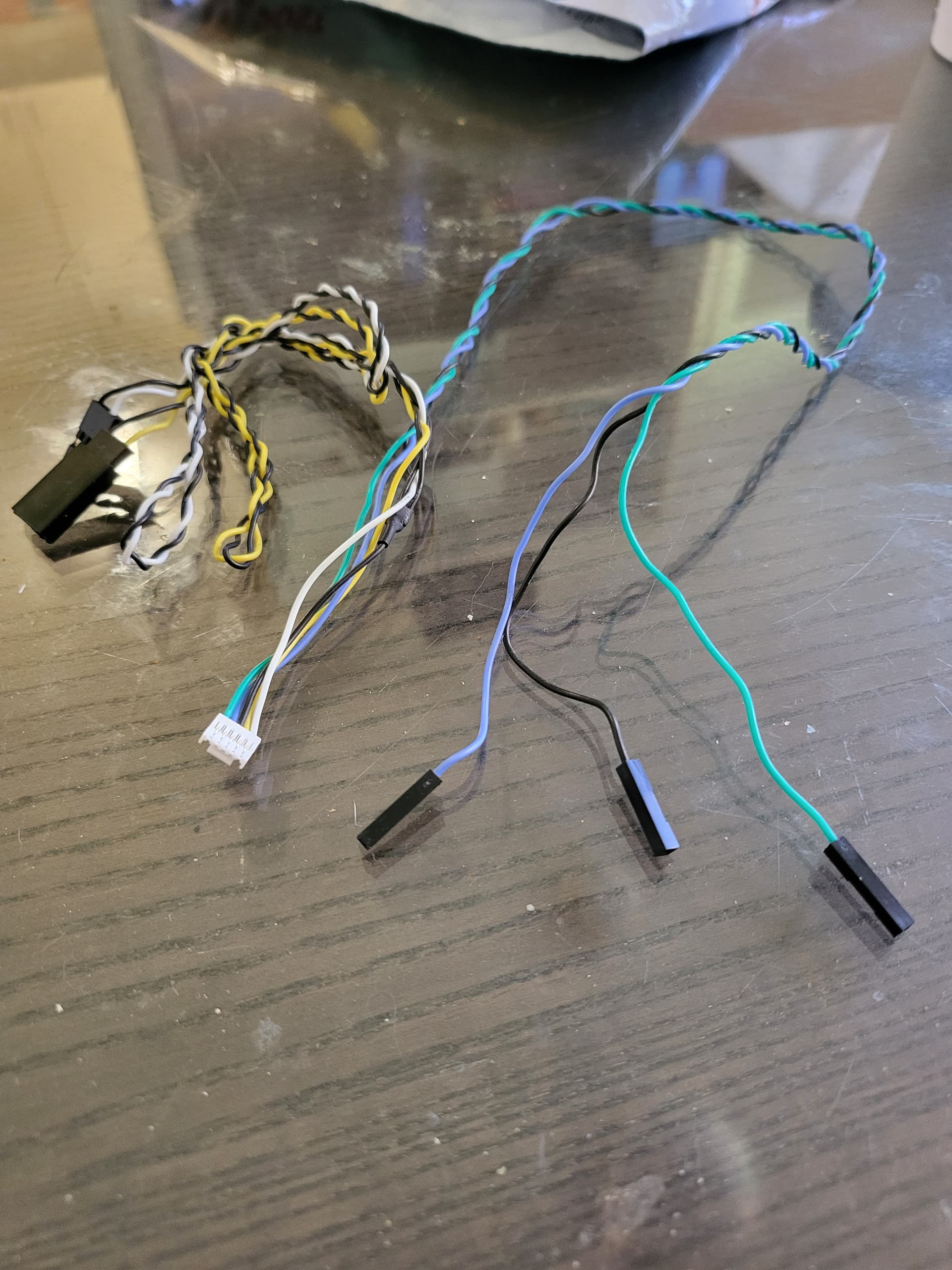
I just received my A8 mini and I will be connecting it to a “regular” flight controller, probably the QioTek Zealot H743 which has 4pin GH connectors for UARTS. There are a lot of cables in the box, but I can’t find pinouts documented anywhere.
How would I connect the A8 mini to either a 4 pin UART or to Uart5 which has 6 pins with S-Bus out on one of the pins?
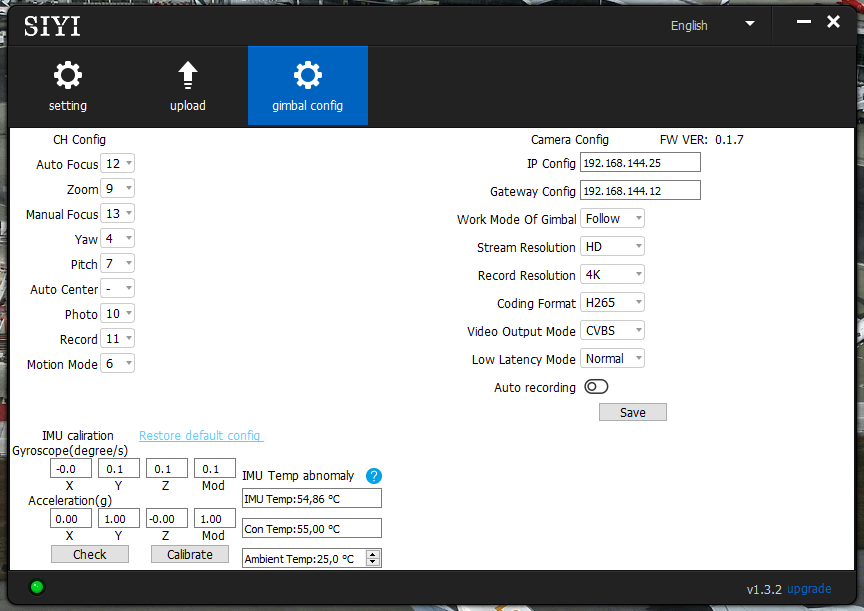
@SIYI is it possible to change the Stream Resolution for Ethernet to Full HD with the PC Assistant (FW 0.1.7 and PC Assistant v.1.3.2)? Everytime I change this the setting is lost after rebooting the gimbal.
Hi Tim
Every parameter you need to set is in that link. Make sure you have the latest arduplane fw 4.3.3 released about an hour ago as you know
The ardupilot driver is the same for all siyi cameras so some parameters are not required eg for the A8 no manual or auto focus