I’m adding a “How-To” for the TXMOD and SBUS for RC control.
I’m covering two aspects here:
- SBUS
- Increasing the baud rate - partially because that’s how I have mine set, so better to mention it now than have anyone confused by the screenshots, and partially because nearly everyone should update to the higher baud rates unless you fly very long distances
On the air-side/remote radio you need the SBUS output connected to the RCin of your flight controller. It’s the same pin as for RC/PPM but the function changes depending on the next settings you choose.
RFD900X
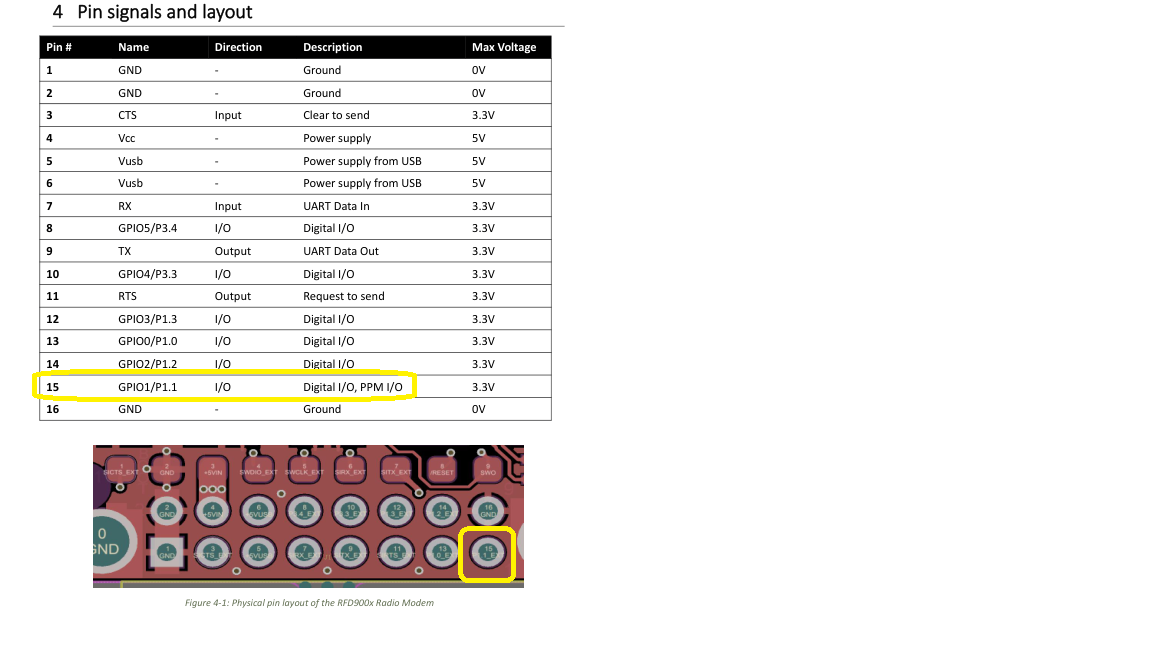
RFD900UX

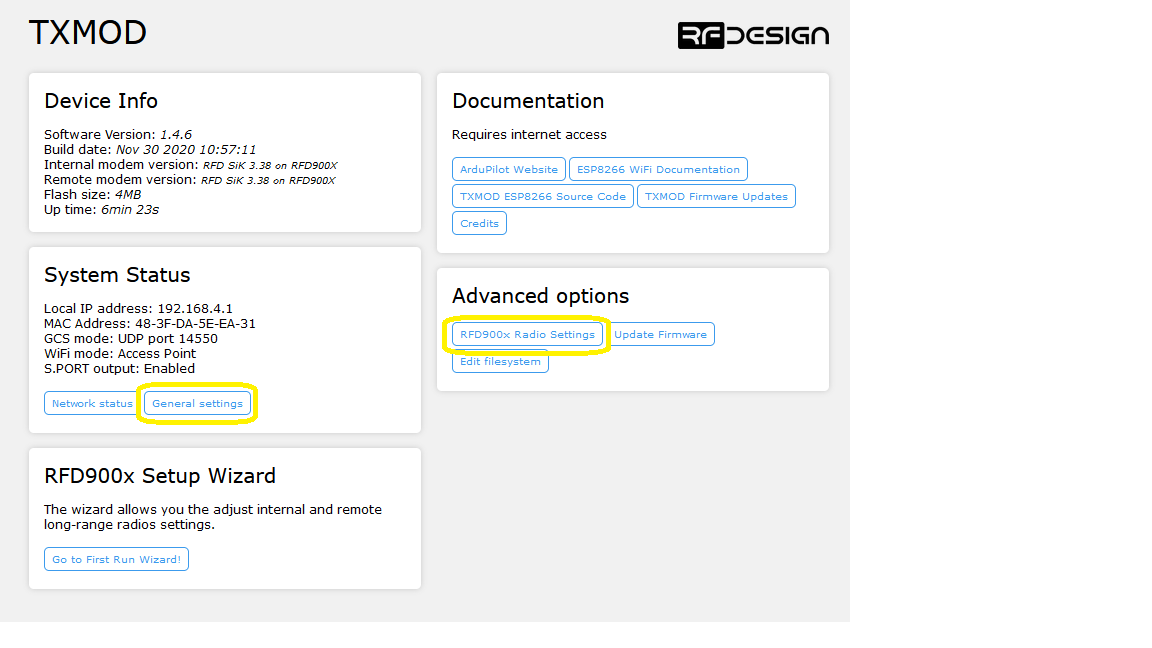
You can do some of this in the RFD Tools, or better to use the TXMOD web interface - just connect to it’s wifi network while it’s powered up.
In a web browser just hit the IP address of the TXMOD which will be http://192.168.4.1 unless you changed it
We are assuming you’ve already ran the wizard and radios are connected and operational.
Go to System Status General Settings
- Change the WiFi baud rate (for connecting to MissionPlanner and others) This should always be the same as the SERIAL baud rate you use for telemetry
- Enable the S.PORT output to feed the telemtry data to the transmitter, for such things as the Yaapu Telemetry script
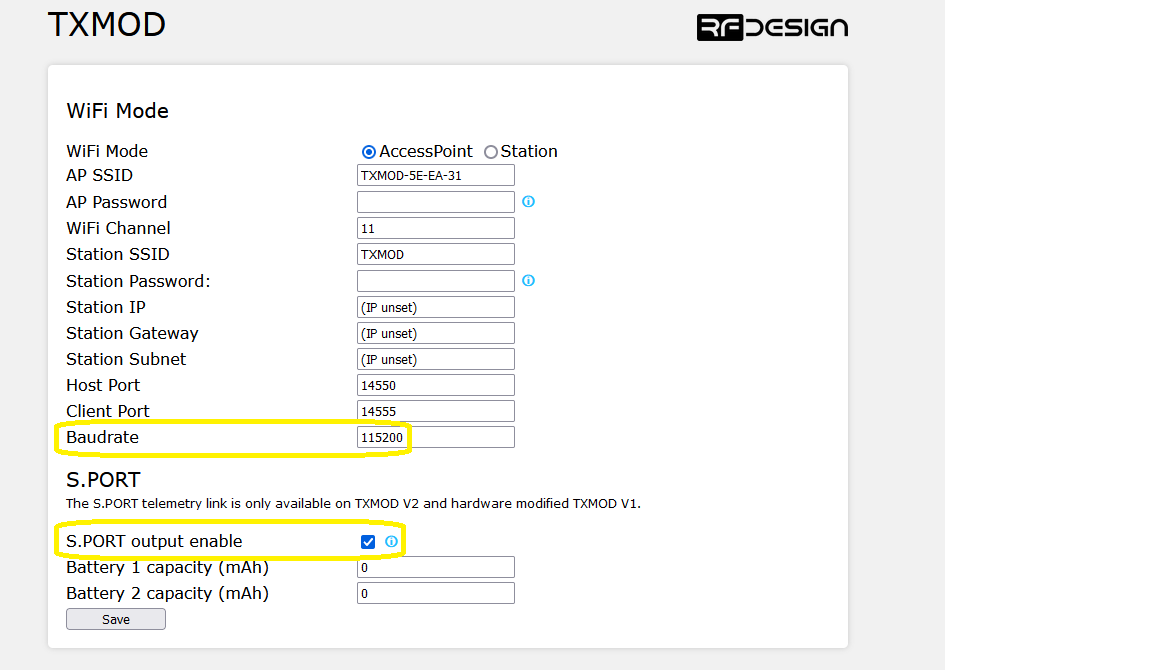
This changes the serial comms baud rate between the groundstation (or yaapu telemetry script) and the remote radio/ flight controller
Go into the Advanced options RFD Radio Settings
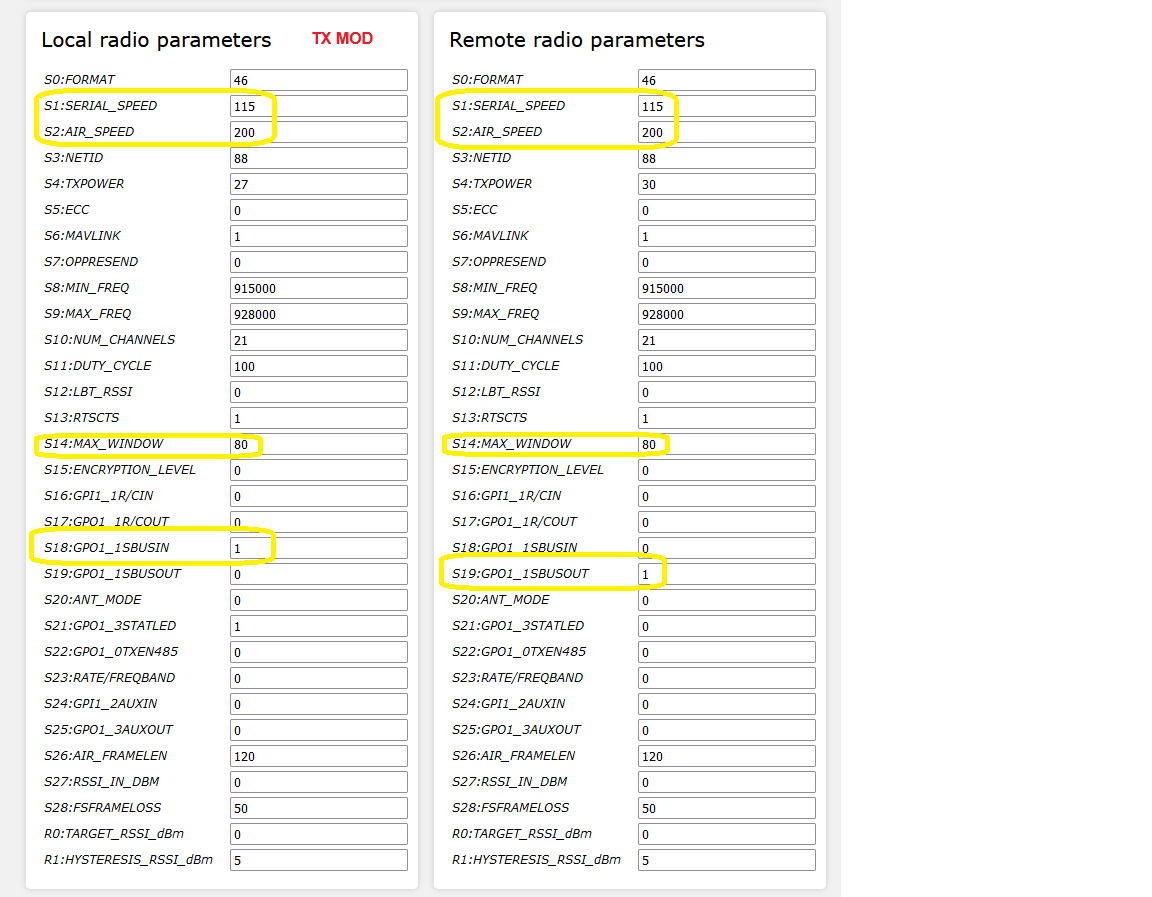
- Set the serial baud rate to 115 and Air Speed to 200
- Set the Max Window to 80
- On the Local radio (TX MOD) set the SBUSIN GPIO port to 1
- On the Remote radio (air unit) set the SBUSOUT GPIO to 1
It is also possible to have one set to SBUS and one set to R/C and the RFD’s will convert between SBUS and PPM - but why would you ![]()
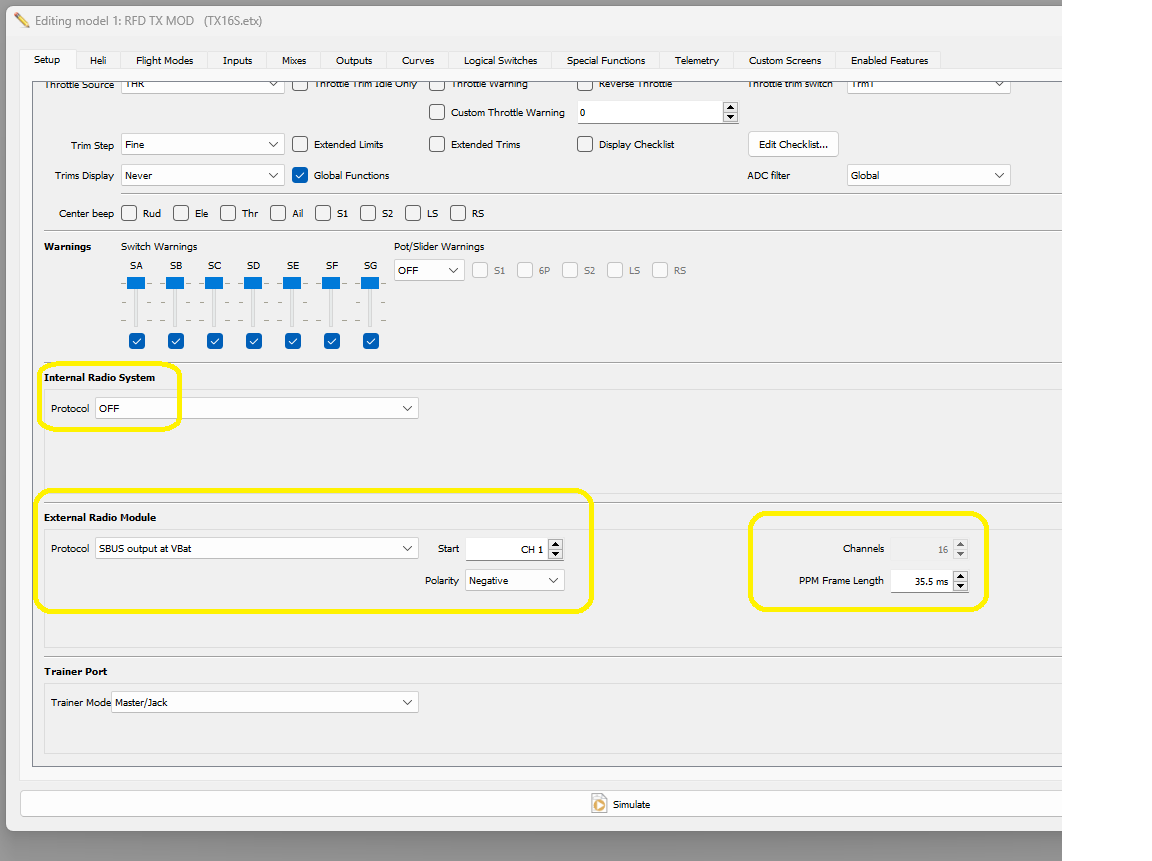
In the RC Transmitter you have to edit the model you use with the TXMOD.
- Disable the Internal RF
- Enable the External RF
- Select SBUS at VBat , negative polarity
- Adjust the PPM frame length if necessary, if this is wrong you wont have all 16 channels available, come back and fix it
I use the EdgeTX Companion, the OpenTX Companion is basically the same. You can do this in the radio itself too if you are good at clicking around with the buttons or on the touch screen (with EdgeTX)
If updating the baud rates from the default 56k to 115k then you need to also change your flight controller settings:
SERIAL1_BAUD,115
SERIAL1_OPTIONS,0
SERIAL1_PROTOCOL,2
Probably do this last via USB connection
Use the MissionPlanner RC Calibration screen to check you get all the channels and that they actually work.
If using the TXMOD WiFi to connect, remember to select 115200 baud in the MissionPlanner or QGC connection dialog.
You probably should run the calinration again too, since the ranges might be slightly different to whatever RC receiver you were using before.
Welcome to downloading logs by radio FAST (well bearable anyway) and not having to go through that awful PPM failsafe dance !
Emergency recovery
If at anytime you completely lose contact and cant recover anything, the TXMOD has a reset button - press 5 times in 5 seconds to reset everything to defaults
The air-side radios can be connected direct to a PC via a FTDI USB cable, or just keep changing the flight controller SERIALx_BAUD value until you establish contact. It will most likely be either 57 or 115
Please advise me of any differences or issues and we can update this thread. I’ll capture more screenshots if I have to.