timtuxworth
March 22, 2022, 11:19pm
42
Are we trying to implement a general solution for a specific problem? What exactly caused “it didn’t”, and what was the unusual flying location?
I don’t know if you’ve seen my post about a crash I had when my plane did an RTL after it had landed (caused by the geofence being too close to the runway). Geofence breach RTL after landing = crash
I’m not trying to change the subject, just thinking that the whole auto land design maybe needs some thought end-to-end, including input from @iampete and @WickedShell and others, rather than just patching individual issues with possible unintended consequences.
timtuxworth
March 22, 2022, 11:24pm
43
Sorry that’s the wrong post - hang on, I’ll fix it. Ok - fixed. Geofence breach RTL after landing = crash.
Allister
March 23, 2022, 12:03am
44
tridge:
set RTL_AUTOLAND to -1
I could live with that. Then it’s a user choice one way or the other to set it up or leave it. It will need a wiki update. I should learn how to do that just to help out…
2 Likes
timtuxworth
March 23, 2022, 12:08am
45
Are you sure? How about this? You are landing a quad on a ship … an unexpected large wave buffets the vessel just as you are about to touchdown with the quad. You abort the landing - but you still want to land - so - go around? (start again)?
tridge
March 23, 2022, 12:12am
46
@timtuxworth see the special ship landing mode in 4.2, which has abort
[image]
The Plane 4.2 firmware (from beta2 onwards) supports landing on a moving platform. This post describes how to use this functionality. Testers would be very welcome.
Equipment Needed
To use ship landing you need a beacon setup on the landing platform. This beacon should be a flight controller running the ArduPilot Rover firmware. You can set the FRAME_CLASS on the beacon to 2 to make it a “boat” so the right icon shows in the ground station.
The beacon flight controller needs the foll…
timtuxworth
March 23, 2022, 12:14am
47
So does this mean we need to get QGroundControl changed? If it’s data driven I guess it might work, but right now there is no option in QGC to set RTL_AUTOLAND to -1
Allister
March 23, 2022, 12:20am
48
Admittedly I’m not a regular user of QGC. I mostly only use it from my iPad in the field with a few vehicles. But I think you can use the “advanced settings” in a parameter to override the basic choices.
timtuxworth
March 23, 2022, 12:30am
49
Oh I see you can do that - you have to select “Advanced Settings” and then “Manual Entry” - so this means that for the wizard generated drag and drop landing in QGC, it will always throw this error on arming and the user will have to figure out that they need to manually override this value.
It kind of defeats the “user friendly” idea of having the landing setup wizard no?
I use QGC whenever I can, mostly because I got rid of my last Windows machine more than 10 years ago, I only have Macs, one in the office, one for the field.
tridge
March 23, 2022, 12:30am
50
i’ve updated the PR so there is a new RTL_AUTOLAND=3 that disables the arming check and allows for go-around usage of DO_LAND_START
ArduPilot:master ← tridge:pr-DLS-check2
opened 02:45AM - 22 Mar 22 UTC
on fixed wing aircraft you can use DO_LAND_START with DO_GO_AROUND. On
QuadPlan… e there is no reason to have DO_LAND_START without
RTL_AUTOLAND
Allister
March 23, 2022, 12:33am
51
So that would be the same as the -1 you mentioned before?
tridge
March 23, 2022, 12:34am
52
yes, both -1 and 3 will work, I just decided to make 3 the one that will appear in the dropdown menu when setting the param
1 Like
Allister
March 23, 2022, 12:35am
53
That makes sense. I’m good with it. Thanks!
timtuxworth
March 23, 2022, 12:41am
54
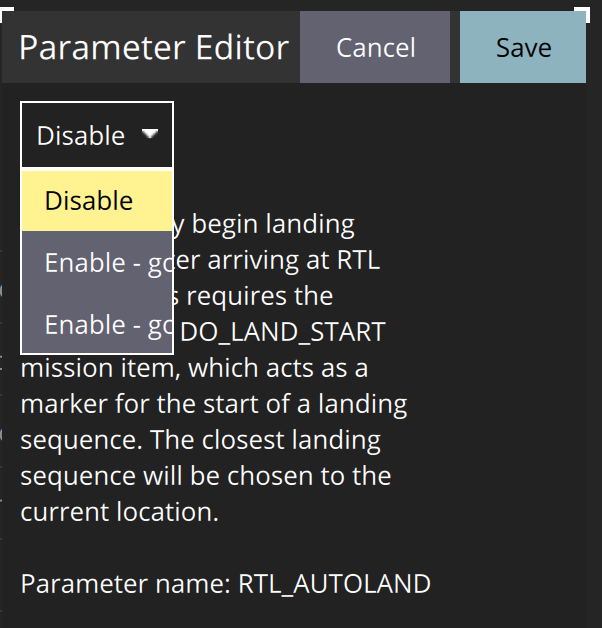
I’m struggling with how to describe this in the docs. RTL_AUTOLAND = “Automatically begin landing sequence after arriving at RTL location.”
So the table would look like this:
Value
Meaning
0
Disable
1
Home - Enable fly HOME or to a Rally point then land
2
Land - Enable go directly to landing sequence
3
Go Around - Disable but allow Arming with DO_LAND_START in the mission for go arounds.
This is because in QGC - only the first part of the text is shown, so the options will all look the same otherwise. Here is a screenshot:
tridge
March 23, 2022, 12:42am
55
close, but on (1) a rally point may be used
timtuxworth
March 23, 2022, 12:43am
56
I just copied what was there
tridge
March 23, 2022, 12:47am
57
thanks, i’ve updated the PR to clarify
timtuxworth
March 23, 2022, 12:49am
58
Are the docs generated from Parameters.cpp? If so can I suggest you use the text I have put above, including the rally point , I think (maybe), it’s clearer than just “OnlyForGoAround”. I added a screen shot to show why it’s important.
tridge
March 28, 2022, 8:25pm
59
I’ve just released ArduPilot Plane 4.2.0beta4. Several important fixes are included since the previous beta, plus some new features.
added BATT_OPTIONS option to send resting voltage (corrected for internal resistance) to the ground station
fixed a bug when a blended GPS is lost, where the wrong GPS could be used for a short time
prevent rapid RTL/AUTO switching with DO_LAND_START and fence breach
added RTL_AUTOLAND=3 to prevent arming check about DO_LAND_START with no RTL_AUTOLAND
fixed yaw in AUTO mode on the ground on quadplanes when using rudder to disarm
fixed failover between IOMCU RC input and a secondary RC input on a uart
display source of RC input with protocol
fixed DShot reversal bugs with IOMCU based boards
fixed battery remaining percentage with sum battery backend
added KakuteH7-bdshot
added terrain reference adjustment and TERRAIN_OFS_MAX parameter
fixed param conversion bug (impacts airspeed enable)
changed MatekH743 to use a 32 bit timer
Happy flying!
6 Likes
_sobi
March 30, 2022, 3:29pm
60
Where can I find any details to “DJI FPV OSD multi screen and stats support” please?
tridge
March 30, 2022, 9:08pm
61
there is more information in this PR which added the feature:
ArduPilot:master ← yaapu:pr/msp_osd_multiscreen
opened 11:06PM - 19 Aug 21 UTC
This adds multiple screens and stats to the DJI MSP Backend.
Support for multip… le screens is similar to regular OSD, one has to enable the additional screens with OSDn_ENABLE and switch between them with one of the supported methods defined by OSD_SW_METHOD.
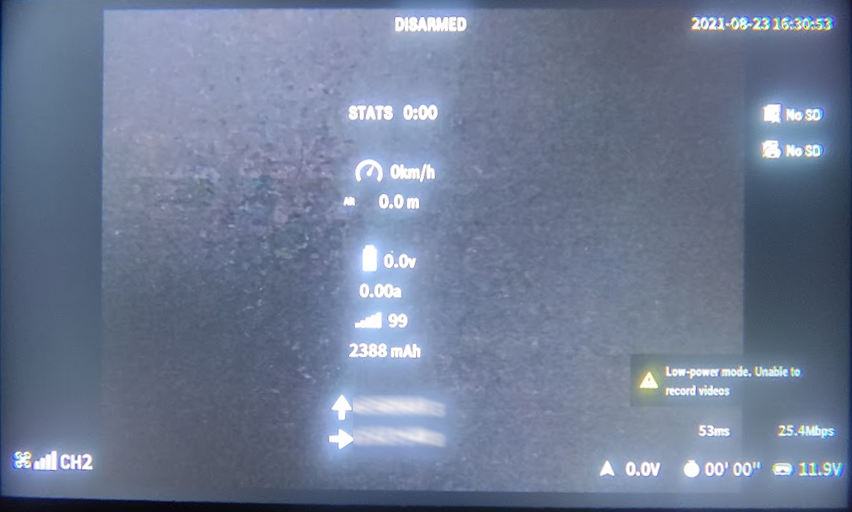
Stats needed a "hack", when a user switches to a screen that has stats enabled with OSDn_STATS_EN = 1, the telemetry for speed, altitude, voltage, current and distance will report min/max values rather than instant values.
The home distance OSD item will alternate every 2 seconds between max home distance and total traveled distance
The message text OSD item will report "STATS hh:mm" where hh:mm is the flight time and just like usual incoming status text messages will be shown with rolling text.

stats panels have to be individually enabled
- OSDn_STATS_EN 1.000000, required to enable the new stats feature
- OSDn_MESSAGE_EN 1.000000, required to display flight time in stats display mode
- OSDn_ALTITUDE_EN 1.000000, shows max altitude
- OSDn_BAT_VOLT_EN 1.000000, shows min voltage
- OSDn_CURRENT_EN 1.000000, shows max current
- OSDn_GSPEED_EN 1.000000, shows max ground speed
- OSDn_HOMEDIST_EN 1.000000, alternates max distance from home and total traveled distance every 2 seconds
- OSDn_RSSI_EN 1.000000, shows min rssi
_Note: to get airspeed max rather than gspeed max just like usual one have to set OSDn_ASPEED_EN =1_
A possible layout:
OSD2_ENABLE 1.000000
OSD2_STATS_EN 1.000000
OSD2_MESSAGE_EN 1.000000
OSD2_MESSAGE_X 14.000000
OSD2_MESSAGE_Y 3.000000
OSD2_ARMING_EN 1.000000
OSD2_ARMING_X 12.000000
OSD2_ARMING_Y 0.000000
OSD2_ALTITUDE_EN 1.000000
OSD2_ALTITUDE_X 11.000000
OSD2_ALTITUDE_Y 6.000000
OSD2_BATUSED_EN 1.000000
OSD2_BATUSED_X 12.000000
OSD2_BATUSED_Y 11.000000
OSD2_BAT_VOLT_EN 1.000000
OSD2_BAT_VOLT_X 12.000000
OSD2_BAT_VOLT_Y 8.000000
OSD2_CLK_EN 1.000000
OSD2_CLK_X 12.000000
OSD2_CLK_Y 0.000000
OSD2_CURRENT_EN 1.000000
OSD2_CURRENT_X 11.000000
OSD2_CURRENT_Y 9.000000
OSD2_GPSLAT_EN 1.000000
OSD2_GPSLAT_X 9.000000
OSD2_GPSLAT_Y 13.000000
OSD2_GPSLONG_EN 1.000000
OSD2_GPSLONG_X 9.000000
OSD2_GPSLONG_Y 14.000000
OSD2_GSPEED_EN 1.000000
OSD2_GSPEED_X 13.000000
OSD2_GSPEED_Y 5.000000
OSD2_HOMEDIST_EN 1.000000
OSD2_HOMEDIST_X 13.000000
OSD2_HOMEDIST_Y 7.000000
OSD2_RSSI_EN 1.000000
OSD2_RSSI_X 13.000000
OSD2_RSSI_Y 10.000000
yielding
1 Like