Quoting Tridge here: “if NAV_LOITER_TURNS is used with Q_GUIDED_MODE=1 then we would orbit
forever. This ensures we do exit the loiter”.
1 Like
Will / can support for the BME280 be added to GND_PROBE_EXT? I have several BME280s on hand but they don’t seem to work as a substitute for BMP280.
Cube Black and i get the same results on a pixhawk in mission planer and in the OSD my rxrssi is always stays on 100 but if i turn off the TX it does go to 0 in mission planer
i am using analogue pin 103 Sbus out pin
frsky x8r show volts 3.1 rssi on the tx is rssi 98 to 2.1 volts tx is rssi 42
under 4.0.4 does not work
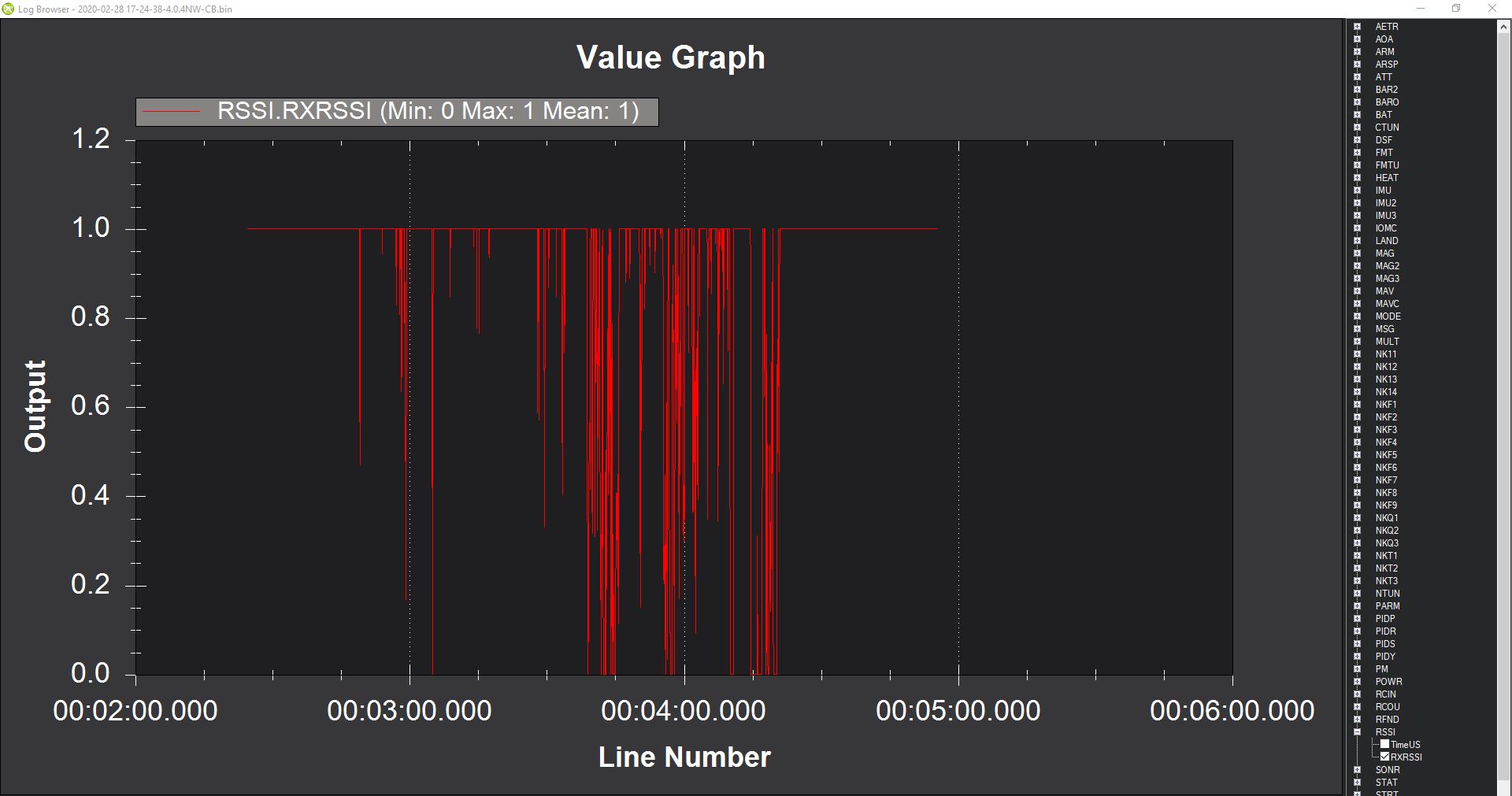
but if i roll it back to 3.9.8 it works in mission planer and the OSD
all 4 plane running cubes
Well its not my setup on all my planes on 4.0.5 don’t work anymore

here are the logs
@ tridge
I am running a Cube Black. I have to have the battery plugged in to do any firmware updates. I just updated from Plane 3.9.7 to 4.0.4. After update was finished and the tones played, the motors spun up to THR_MIN. I was in manual mode and THR_PASS_STAB=1. The plane was not armed. The only way I could keep the motors from spinning was to change from Throttle to Throttle Left and Throttle Right. After disconnecting the battery and removing what was left of the props, I plugged the battery back in to find that when the motors were set to Throttle and the plane was disarmed, the signal out was always at THR_MIN. Arm the plane and they would go to 1000. Disarm the plane again and they would spin up. They wouldn’t spin up on boot because channel never went to low throttle to allow the ESC to work.
Does Throttle Right and Throttle Left act in the same manner as throttle in Auto modes?

I’ve just released plane stable 4.0.5. This release includes a one important bug fix and some minor enhancements. The changes are:
- fixed bug handling change of RC input source while MAVLink signing is active. This could cause a stack overflow and a crash
- added display of RC output types to aid in debugging DShot outputs
- modified clocking on H7 boards to produce more accurate clocks for DShot
- switched to new USB VIDs for dual-CDC boards
- fixed a bug in handling LOITER_TURNS for quadplanes when
Q_GUIDED_MODE is enabled - added a TECS reset at the end of a VTOL takeoff to handle aircraft with TECS climb rates below VTOL climb rates
Many thanks to everyone who tested the beta!
Happy flying!
3 Likes
Hello, where did you connect the airspeed (analog)? On a matek F765-WING
Check the Matek F765-Wing connection diagram and you’ll find out… There is a soldering pad for that purpose.
The port labelled AirS.
ARSPD_PIN,10
ARSPD_TUBE_ORDER,0
ARSPD_TYPE,2
Thank you, that’s how it works now.
maybe someone can now tell me where I can shoot a second battery voltage?
I need a second battery indicator in the osd
For example (current sensor is Allegro ACS758LCB-100B with voltage divider to 3,3 V):
BATT2_AMP_OFFSET,1.6668
BATT2_AMP_PERVLT,75.65
BATT2_ARM_MAH,0
BATT2_ARM_VOLT,0
BATT2_CAPACITY,5000
BATT2_CRT_MAH,0
BATT2_CRT_VOLT,0
BATT2_CURR_PIN,15
BATT2_FS_CRT_ACT,0
BATT2_FS_LOW_ACT,0
BATT2_FS_VOLTSRC,0
BATT2_LOW_MAH,0
BATT2_LOW_TIMER,10
BATT2_LOW_VOLT,0
BATT2_MONITOR,4
BATT2_SERIAL_NUM,-1
BATT2_VOLT_MULT,12.08911
BATT2_VOLT_PIN,4
Watch my video only in Russian language: https://www.youtube.com/watch?v=P6vDcpMvtCs
It looks like the maximum number of waypoints have been reduced with Plane 4.0 from the previously known 724. We just run into this as we upgraded our planes from 3.9 to the most recent one and uploaded the same mission what we flew 3 months ago. It gave an error now as it exceeded the max number. Anybody aware of the new limit of waypoints?
ahh, that will be the change for CAN DNA storage. It should be 656 waypoints now.
We intend to increase this again in the future using the ability to use the extra memory available on new boards, plus the ability to overflow to microSD. My apologies for not including this in the release notes.
Dear @tridge ! Thanks a lot for the quick response. I was looking at the code and started to wonder if getting rid of the rally/fence points would do us any good, but I would rather stick with the main branch. We highly hope you are able to utilize the new boards with Cortex®-M7 processor so you should have plenty of space to expand. In the meantime we will just upload the new waypoints in a holding pattern in air.
I’m delighted to announce the first beta of Plane 4.0.6 has been released. This is a major release with a significant number of new features and bug fixes. You should read the list of changes and the information below carefully.
- changed LED scripting API to allow more than 32 LEDs on a pin
- added support for ProfiLED LEDs
- added u-blox GPS moving baseline u-blox auto-configuration
- fixed handling of GPS antenna positions on EKF GPS switch
- changed default USB IDs to new ArduPilot specific IDs
- fixed bug in handling trim for RC control of camera mounts
- added LGR_OPTIONS bits to control landing gear behaviour on takeoff/landing
- improved mavlink streaming output control to better allocate time to each channel
- fixed send of mavlink PARAM_VALUE on set of a readonly parameter
- fixed mag variance reporting in EKF_STATUS_REPORT mavlink message
- fixed time wrap bug in BMP085 barometer driver
- fixed buffer overflow in ST24 RC input driver
- fixed EKF usage of WMM tables when user has specified a specific declination
- fixed bug in AP_Terrain on-disk format
- added script for offline generation of terrain data
- severel improvements to smbus battery drivers
- fixed a race condition in parameter storage on ChibiOS
- fixed use of zero GNSS timestamp in UAVCAN GPS driver
- improved GCS messages during bootloader flash
- fixed CS pin in bootloader that could corrupt FRAM on some boards
- added GPS yaw to MAVLink GPS_RAW_INT message
- added Hott telemetry support
- added FRSky FPort support
- fixed bug in CAN clock and queue handling on H7 based boards
- added support for BRD_ALT_CONFIG for alternative hardware configs on several boards
- added new boards CUAV-Nora, CUAV-X7, MatekH743, R9Pilot, mRoNexus
- improved reporting of internal errors to GCS
- fixed recursion bug in tonealarm player
- fixed flaperon SERVO_AUTO_TRIM behaviour
- added option to compensate forward throttle for battery voltage
- added compensation in VTOL gains for pressure altitude
- switched to new more flexible compass ordering system
- fixed forcing of safety off on IOMCU reset
- increased maximum compass scale factor to 1.4
- added RTL_CLIMB_MIN parameter for initial climb in RTL
The key changes to existing behaviour to watch out for in this update
are:
USB IDs
ArduPilot has now switched to it’s own USB IDs for all boards. For most users this won’t cause any change, except they may notice the drop down list of devices in MissionPlanner will have the ArduPilot flight controllers labelled more usefully as “ArduPilot” instead of just “STM32”. If you hit issues on windows please try reinstalling the device drivers from this URL:
https://firmware.ardupilot.org/Tools/MissionPlanner/driver.msi
Terrain
A bug fix in the format ArduPilot uses to store terrain data means that your flight controller will need to re-download the terrain data onto the sdcard via your GCS. If you fly without a GCS and you use terrain data then please re-download the terrain data you need by setting up a mission when you have internet access and allowing your flight controller to request terrain data from your GCS.
Pressure Altitude Compensation
This release adds in the missing hook for the VTOL motor controller on a quadplane to compensate the VTOL gains using your pressure altitude. For most people this will not have a noticible effect, but some users that have tuned their aircraft for high locations may notice a tuning change.
Compass Ordering
The new compass ordering system in this release gives a lot more
flexibility and should preseve existing configurations and calibrations. If you hit issues then please have a look at the new compass ordering user interface in recent beta releases of MissionPlanner.
Many thanks to everyone who contributed to and tested this release!
Please report test flights here with logs, both good and bad flights.
Happy flying!
9 Likes
Any fix for tkoff mode ?
No changes in takeoff for beta1. I have added the change to ensure it is flying for more than 10s before starting the circle ready for beta2.
Are there any other takeoff mode issues I should know about?
Only a short but good 10 minute flight with Autostart + FBWA, everything worked perfectly (including the thermals ![]() ). There is the log file: Anmelden – MagentaCLOUD
). There is the log file: Anmelden – MagentaCLOUD
Many thanks to Tridge and everyone who contributed.
Rolf