Good day everyone, the materials I use for the drone I built for hobby purposes.
1-) frame https://tr.aliexpress.com/item/32952518324.html?gatewayAdapt=glo2tur
2-)rotor Readytosky 2212 920KV Brushless Motor, 1200 RPM at Rs 649 in Ahmedabad
3-)propeller 2 Pairs 9 inch 9443 Self-Tightening Propeller Prop for DJI Phantom 2 Vision +
4-)esc https://tr.aliexpress.com/item/1005001854409916.html
5-)4s lipo battery
6-)autopilot Pixhawk 4 – Holybro Store
I applied all the settings required for the flight by following the link “How to methodically tune (almost) any multicopter using ArduCopter 4.4.x”
I share the bin file after autotune
I also tried manual adjustments but my pid values are not good
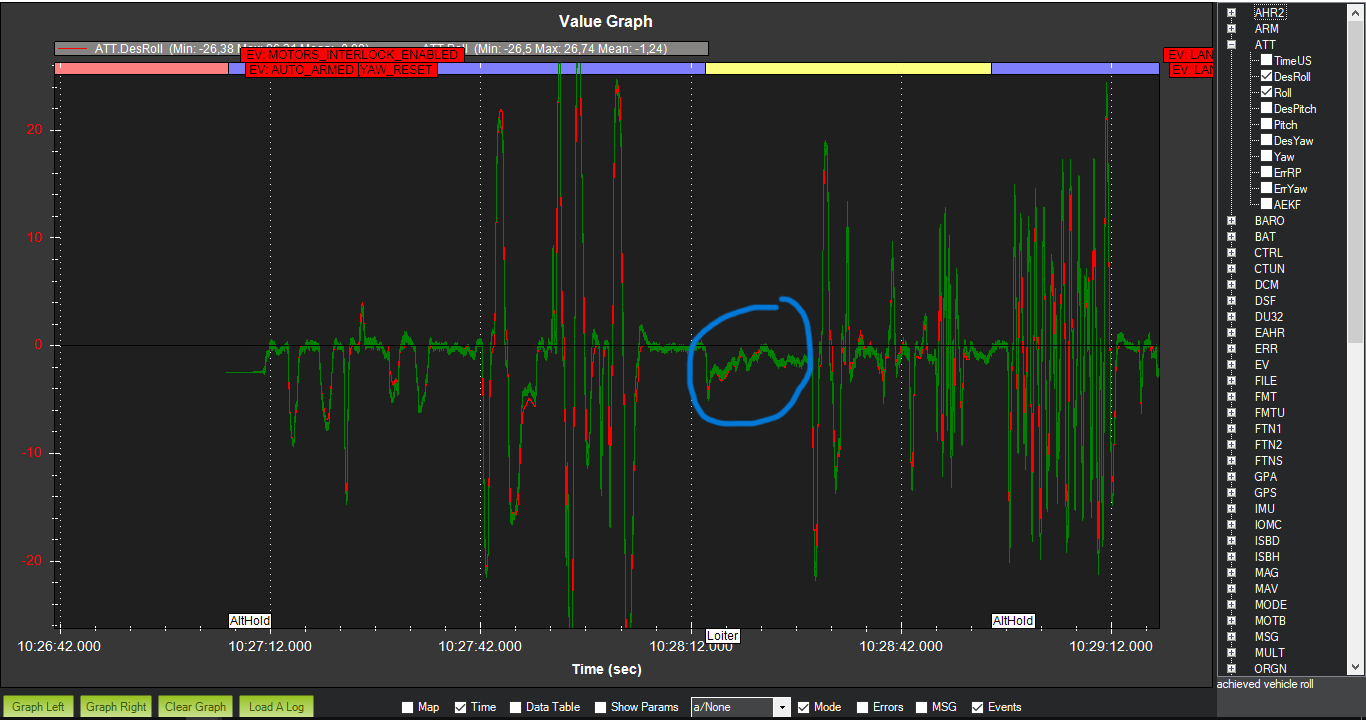
I couldn’t improve my attitude graph. What is the source of the oscillations in the graph?
What is my problem?
.bin file