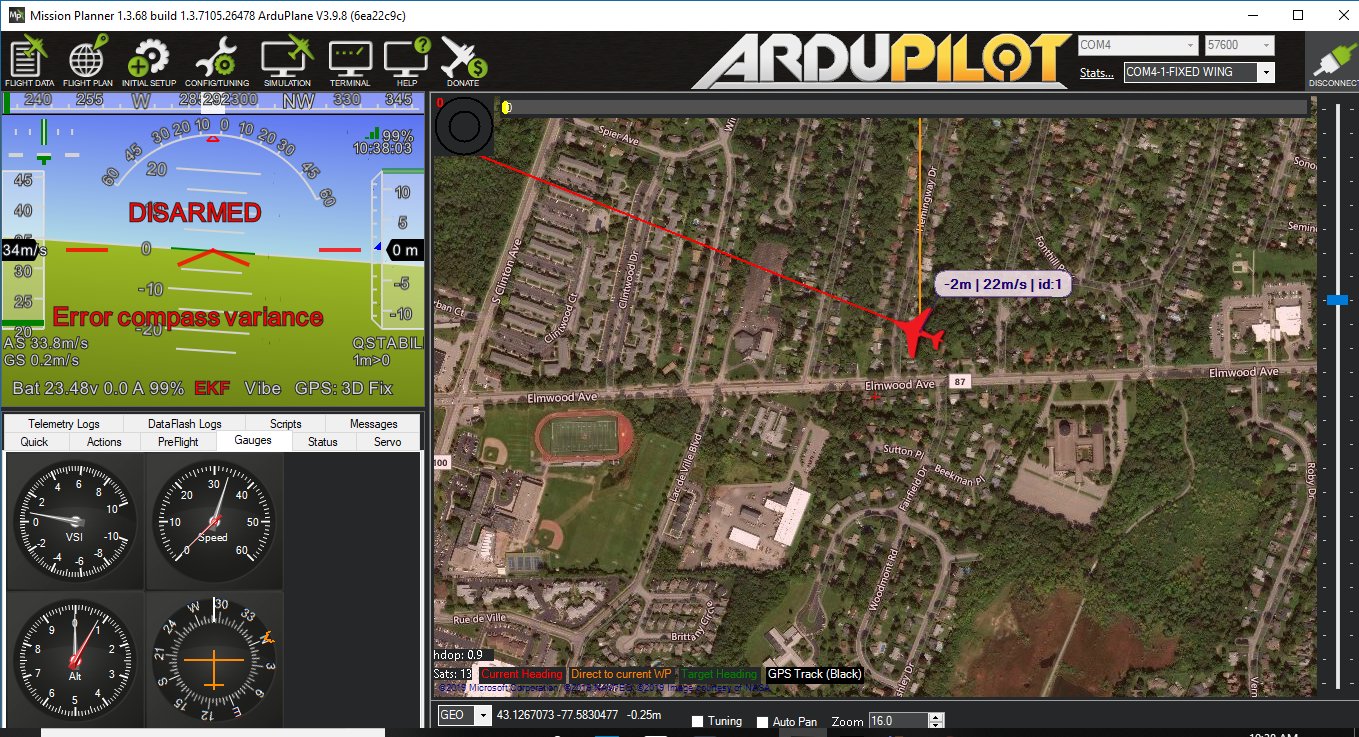
To clarify: the Speed gauge in Mission Planner does seem to work properly in my setup. It bounces from 0-2 without air and I can blow into the pitot tube and watch the needle go up to 30 or 40 m/s.
Is there another way to ground test the AS sensor operation?
Ok, thanks, guys. I have several other complete analog AS sensor sets so I can try swapping out the current one. My point is that even after I swap it out, it seems the Speed gauge on the HUD may not be a foolproof way to test it…but I can look for differences between the two sensors. I’ll then fly it and look at the logs since it gets logged even if you don’t use it.
Eventually, I would like to get the SPD33 sensor kit but it still says “Pre-order” on the Drotek site.
Greg, this seems to be the same problem I am having, that the transition doesn’t seem to complete with the motors tilted partially up. I thought it was solved by going from 11m/s to 9m/s for ARSPD_FBW_MIN but I still had an intermittent issue since then, although Musa reported that it was fixed with his aircraft after that change. Wish @tridge would come past to comment.
It’s also possible that Q_ASSIST_SPEED must be lower than ARSPD_FBW_MIN otherwise one gets too much ‘assistance’ at the lower airspeeds.
BTW, [quote=“Oubie, post:480, topic:31042”]
If the Nimbus stalls at 11m/s and you have set GPS speed at 15m/s
as soon as you get a tail wind of more than 4m/s the plane will stall.
[/quote]
This is not quite true as whether or not one uses an airspeed sensor, Arduplane calculates the wind speed and direction and will increase the plane’s airspeed to try to always fly at, at least ARSPD_FBW_MIN. (To quote: This is referred to in the aviation business as PFM, Pure F’ing Magic. The magicians (Tridge and Paul) use accelerometers to calculate the approximate wind velocity.)
I agree. I just have the added confusion that the airspeed logs graph to crap while the GPS ground speed seems fine. The cure for me is to disable ARSPD_USE. The Nimbus transitions and forward flying are then superb. I’m using stable Plane v3.9.8 on a Pixhawk 2.4.8 (Pixhawk 1) pulled in from Mission Planner.
Is your setup using an analog AS sensor? Pixhawk 1? Is there any other commonality between our setups that might suggest an area to look? Doesn’t the code have a transition time-out on reaching ARSPD_FBW_MIN or revert to GPS speed if the airspeed data is garbage?
I’ll connect another AS sensor this afternoon and look for differences.
The second analog AS sensor behaved the same when blowing into the pitot tube. You can see the Airspeed gauge below behave properly. This was true on both setups. Perhaps if a bug exists, a workaround may be to install a digital AS sensor…for now.
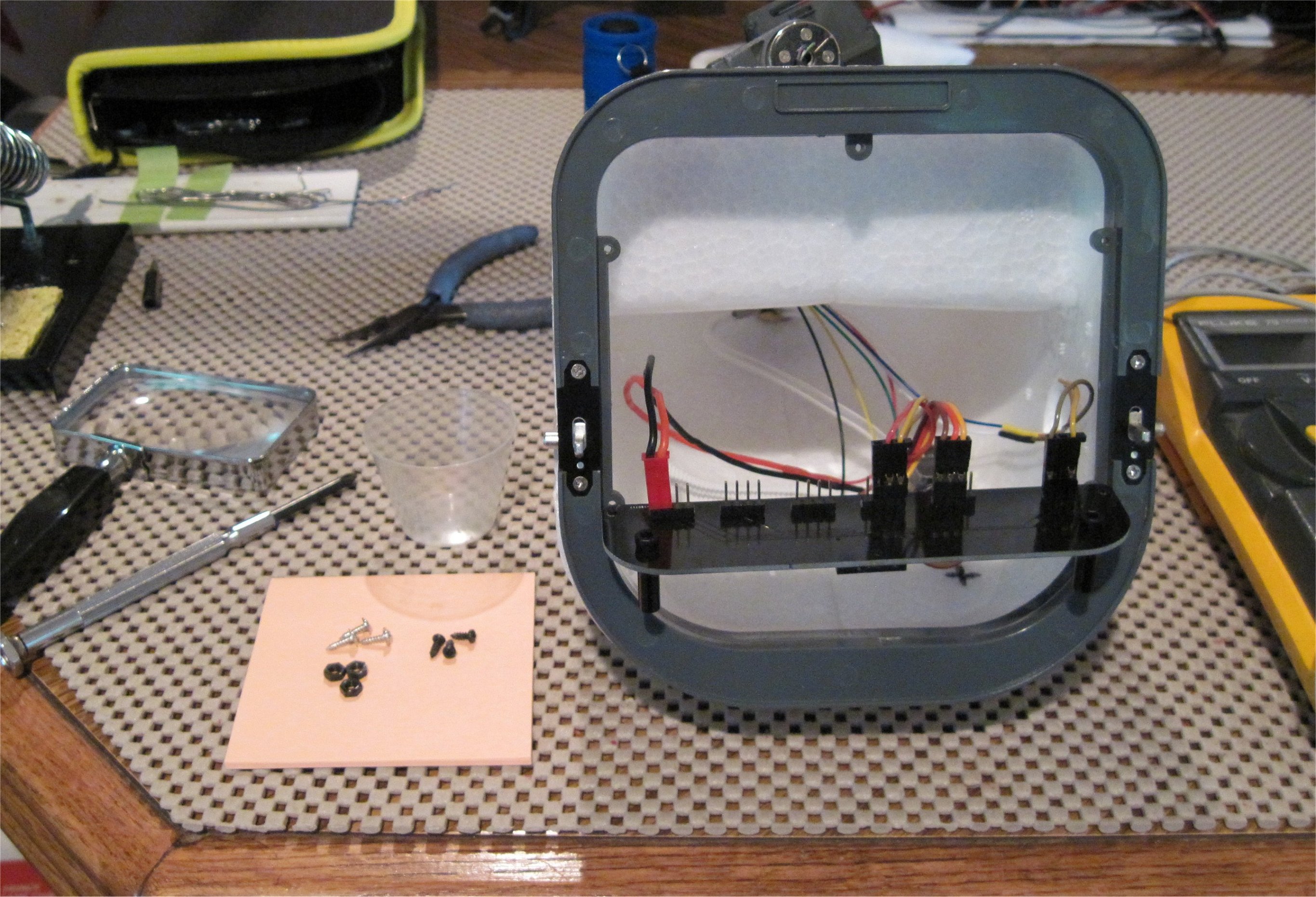
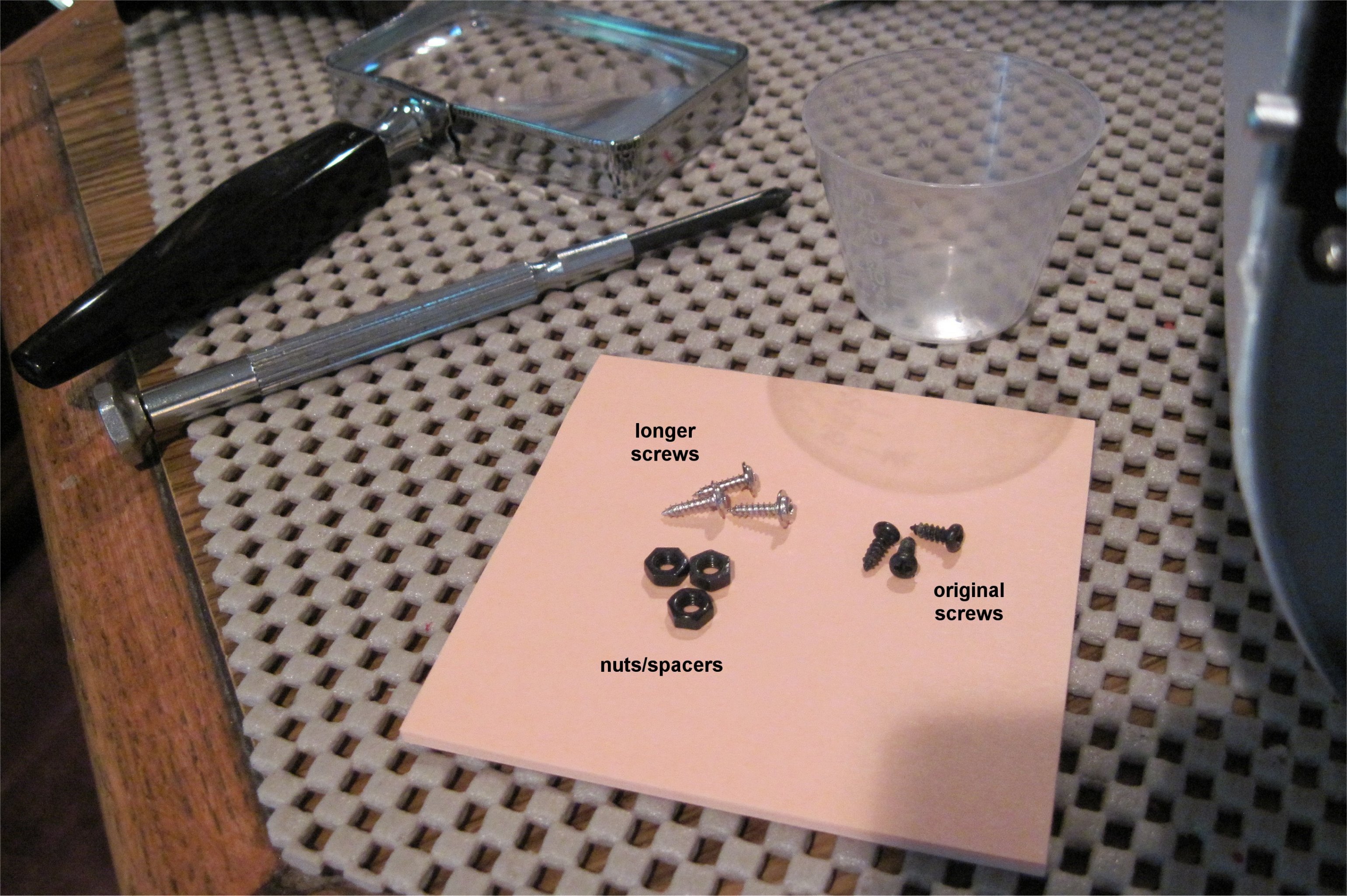
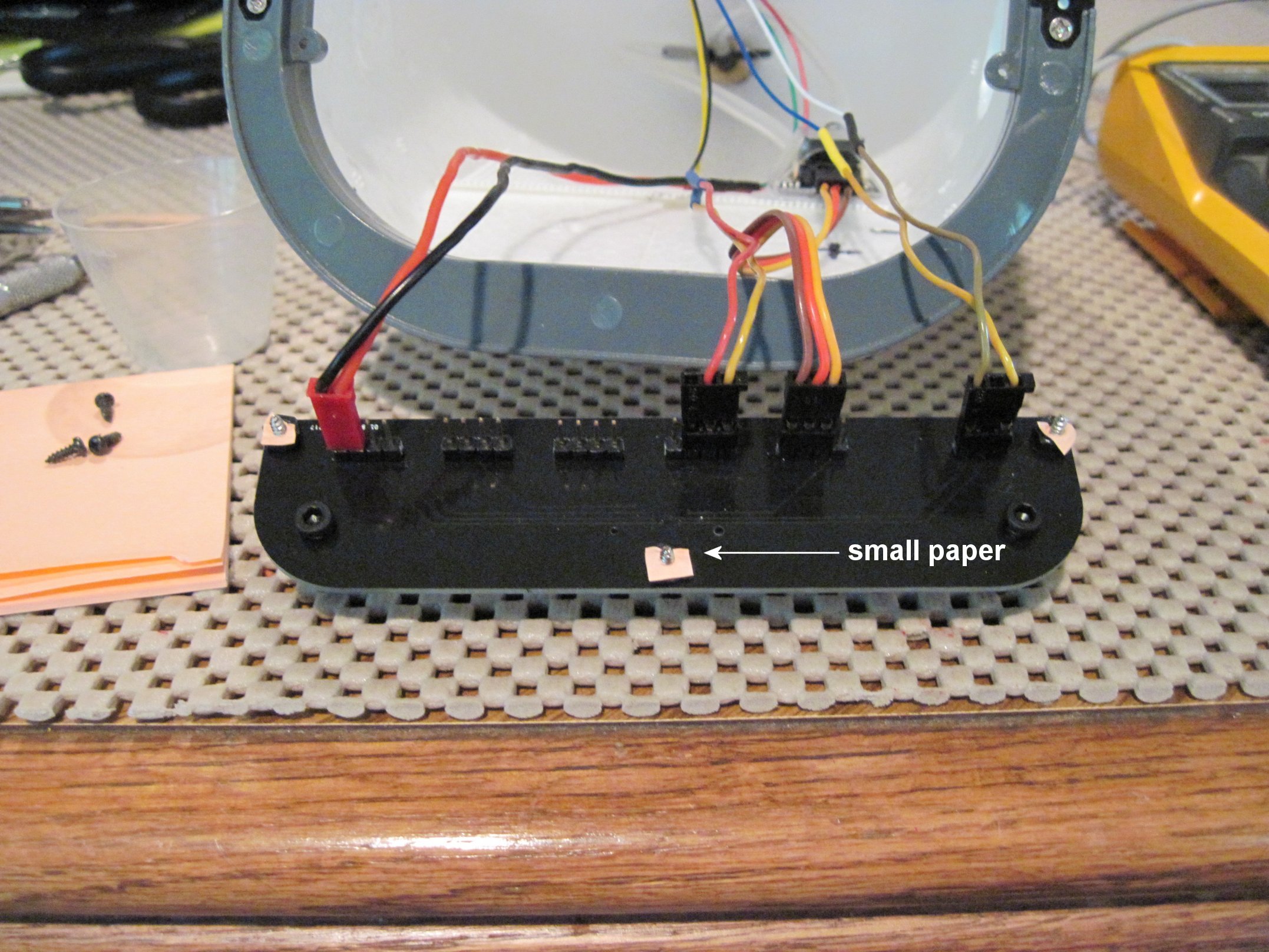
After using a multi-meter, I figured out that the connector between the nose and body was not fully mating. There was no artwork or alignment issue…it was simply a depth problem. I fixed my nose connector problem by replacing the three stock screws in the nose board with slightly longer ones and added some spacers in the back to move the board outward. The spacers were held in place with tiny pieces of paper. Now, my AS sensor and gimbal power/control is back to being cable-free.
Greg, Thank you
Graham, These guys are magicians
My problem - hopefully you experts can get it from the log
I took off in QLOITER then change to CRUISE and after a circuit changed to AUTO
The plane pitched up, climb for a few metres , stopped and transitioned to VTOL ( hanging in the air)
I changed to QLOITER and tried to bring the plane back
All went fine but i had no rudder control.
My questions: Why did it not fly the mission and secondly why did the rudder died on me?
It comes out a bit odd when I open it in MP but I can see it. I think you need to take out the Take-off command from the mission as the plane will try initiate a take-off by going back to hover mode. If flying already then just put a waypoint in as your first mission item.
Not sure about the rudder, is this in 'copter mode? Because the rudder doesn’t work anyway on my Nimbus in plane mode.
Thanks - will change my flight planning procedure and try again
The rudder movement might be that it went from CRUISE to VTOL
without a command (or a none standard command) and switching to QLOITER
over another CRUISE command ( very quickly) did not register properly.