HI guys, we were able to test a Nimbus from foxtech. It was a successfull flight but we encountered some weird issues.
-Were flying in fixedwing in cruise mode and decided to start Mission and switch to AUTO. The aircraft transition from fixwing to tricopter and hovers. While it hovers it change the heading to WP1 and accelerated the transition to fixwing. and continue its mission. This is kind of weird. I was expecting it to continue flying fixwing when i switch to AUTO.
I usually start a AUTO mission from ground so I am not familiar with entering AUTO mode when already flying. Perhaps you need to add this command at the beginning.
Hello Greg, im testing flight modes when we encounter the issue. suppose to be we are flying already in Fixedwing mode and when i change the flight mode from Cruise to Auto Mode, it should have stayed in fixwing. Apparently it converted to Multirotor/Vertical then hovers and set its heading to WP1 and accelerate/transition to fixwing again.
We have exactly same experience, this seems to be a issue of current code.
I think it is actually dangerous as it is.
I was just tuning a quadplane the other day. Finished autotune, then switched to FBWA mode, then to loiter to calibrate Airspeed sensor.
After all that was done, I switched back to FBWA made a few circles that switched to auto, expecting it to start mission heading to waypoing 1 which was “fixedwing” waypoint it I had started from the ground.
However it just switched to Qhover or Qloiter (not sure which) and started to try to fly home that way. It would have not made it as battery would have depleted before it got back. I was so surprised at this, actually took me a while to decide what to do next. Which was switch back to FBWA then fly home manually and then switch to Qloiter and land manually.
This definitely is counter intuitive as is. One shouls be able to take off manually fly around then start/resume a mission. Ot fly a mission, interupt by switching to FBWA then resume by switching to auto, it should not switch to Quadmode.
In my case the uploaded mission had a VTol take off as first line, then next was waypoint 1 which if I started auto from the ground would have transitioned to FW on the way.
Why I think this is dangerous and risky is that no one would expect it to work the way it does now. And going into quad mode at a high altitude is asking for trouble.
There should be some “is flying” and “is fixed wing” check, based on which misson should be resumed. But I think if the basically if a plane is airborne and parameter is set to default, which is transation to Fixed wing when going for WP. Then basically any switch to auto, that finds a WP as next command (of course Takeoff and VTOL takeoff should be automatically skipped if “is flying” = true), then it should not change to Quadplane mode.
Yes it should know it is flying in fixedwing when you chane flight modes that is use for fixwing.unless you manual switch to qloiter/qstab/qhover.
Ours didnt went to Homepoint. It was scary as the aircraft was trying to balance itself due to wind. It hovers and point its direction to wp1 and went to fixwedwing.
I hope this would be address as we fly in mountains. Usualy we test flt the system before going to auto.
Hi Michael,
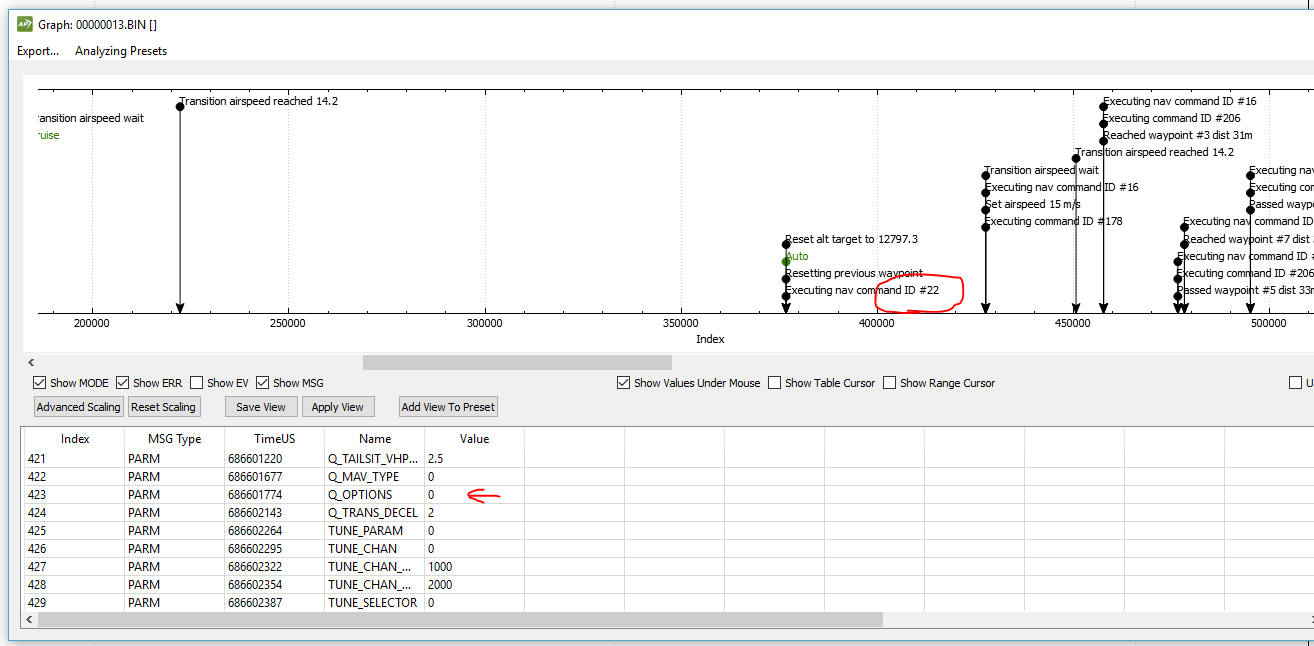
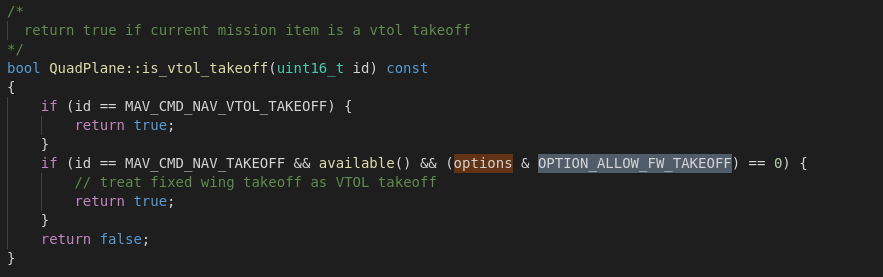
According to the log, the first mission command was TAKEOFF (#22) and the Q_OPTIONS was 0, which means that DO_TAKEOFF command is interpreted as VTOL_TAKEOFF. This is why you plane did a transition to vtol at the start of the mission.
It is indeed a little awkward, but this is how it works at the moment.
Thank you for this information. I woul like to know how to change that, i dont usually do a auto take-off and landing. It would be helpful if we can edit that part. Im not good with logs. But much appreciate if i can see a screenshot of TAKEOFF (#22) and the Q_OPTIONS was 0, which means that DO_TAKEOFF command is interpreted as VTOL_TAKEOFF.
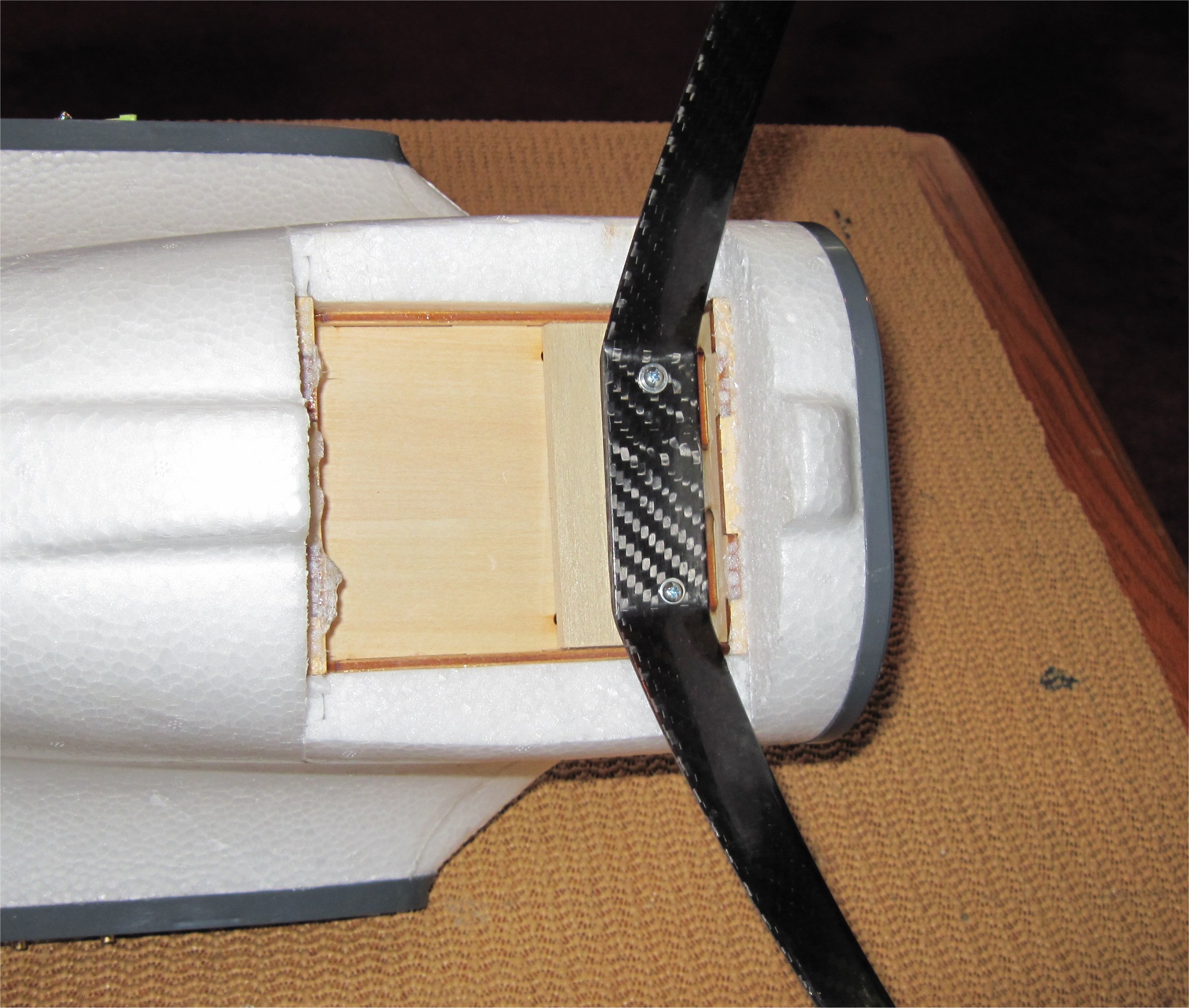
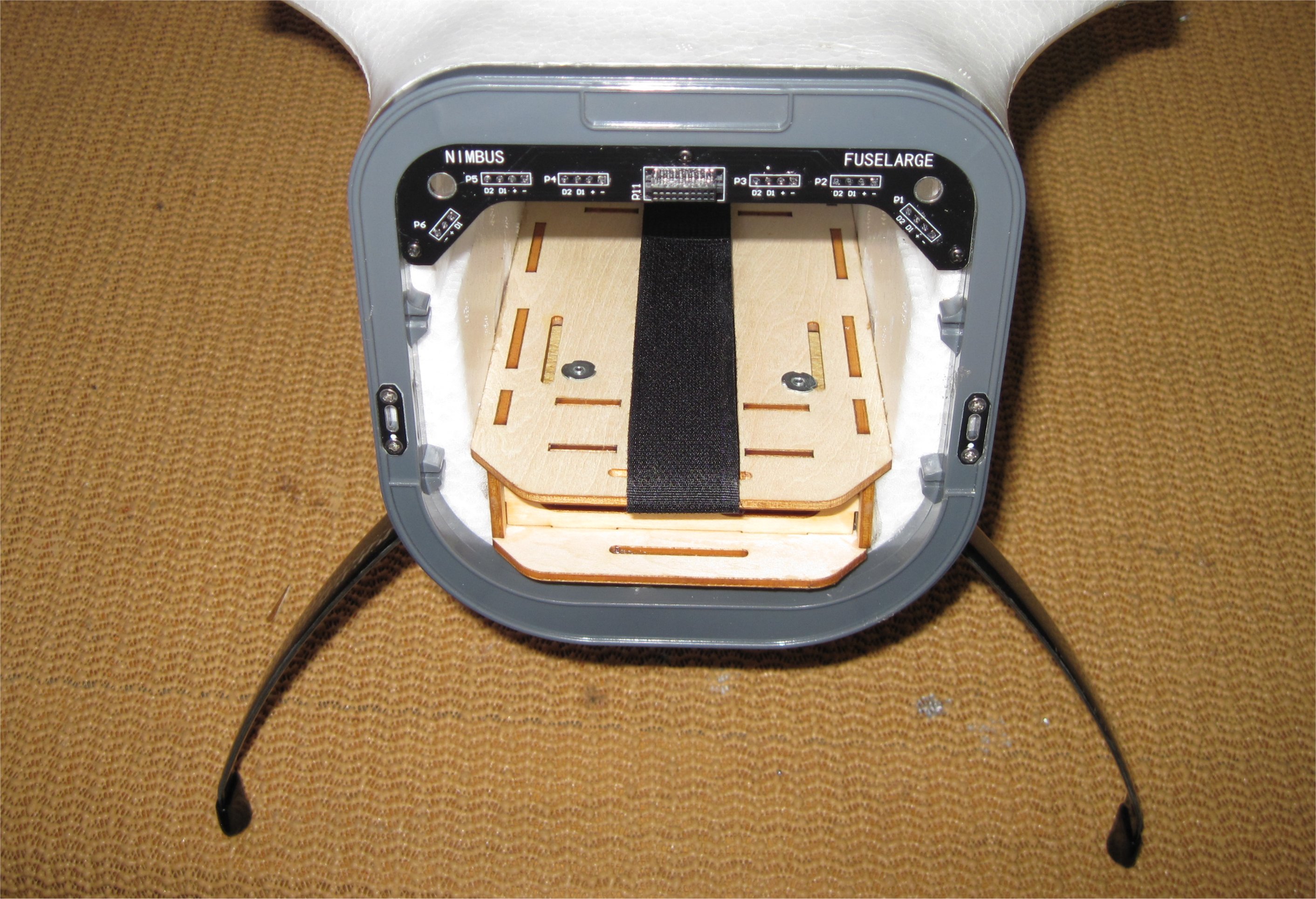
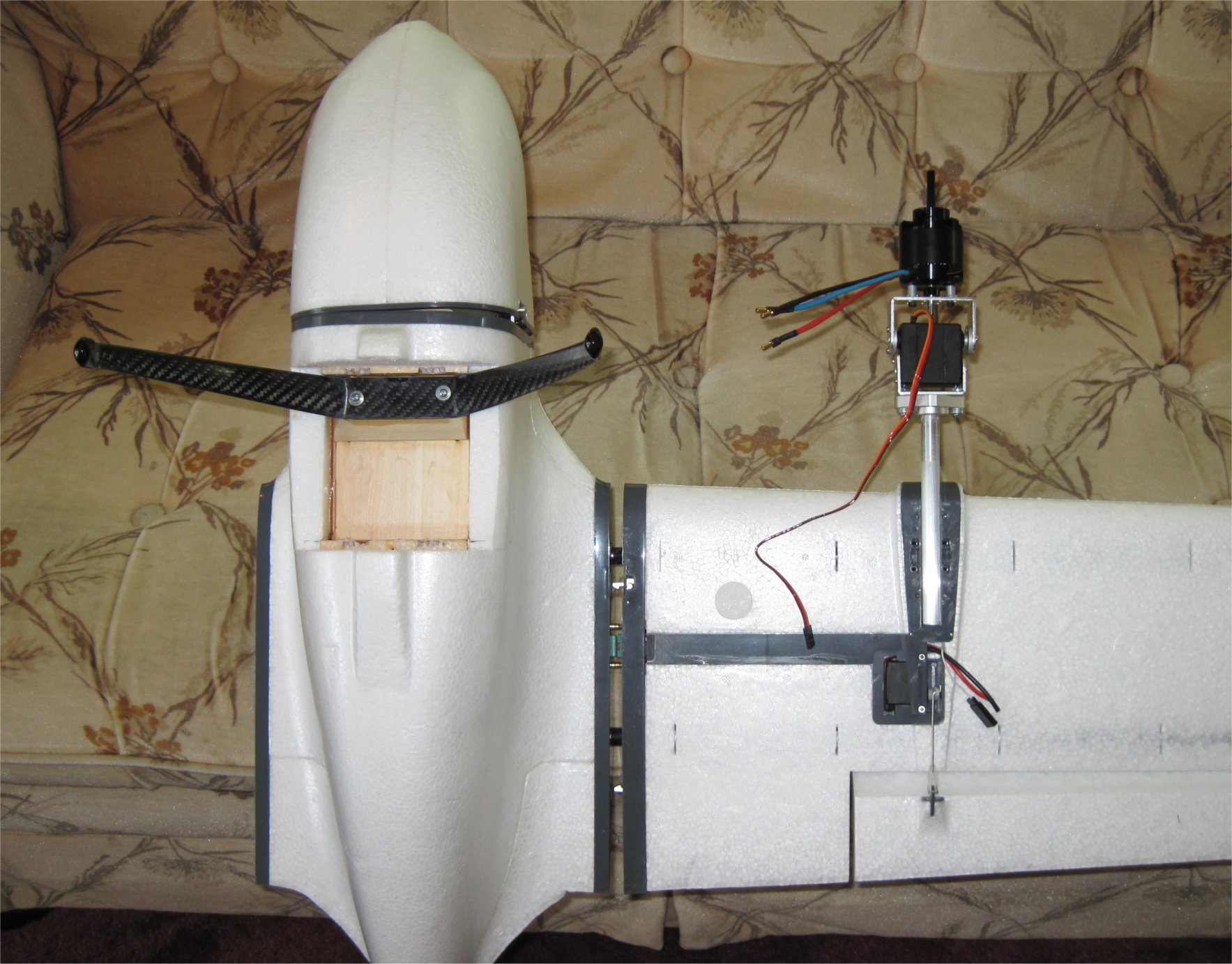
This $15 Carbon Fiber Landing Gear is a perfect fit for the Nimbus 1800. I mounted the carbon landing gear and finally got my Nimbus to stop rolling around. After cutting away the foam bottom, I used some M3 hardware to secure the gear. A poplar block was cut and CAed into the bottom tray for added strength. I added some black rubber caps to the legs which help widen and soften the tips.
I tested my 25mm tube clamps that I bought off AliExpress and they worked great. I bought two sets so I had a second carbon plate; one for the motor and one for the folding GPS mount. This is supposed to be a winter project but I can’t stop myself.
@GregCovey Can you give us your first impression on the ‘‘embedded’’ connectors (looks like 0,100’’ headers) ? It can be a blessing if it is reliable but like some poorly designed PDB it is sometimes a curse
So far, I have only put the wings, nose, and tail sections on to see that the connectors line up and everything latches properly. They did. I have not tested them electrically yet and I have not heard of any issues either.
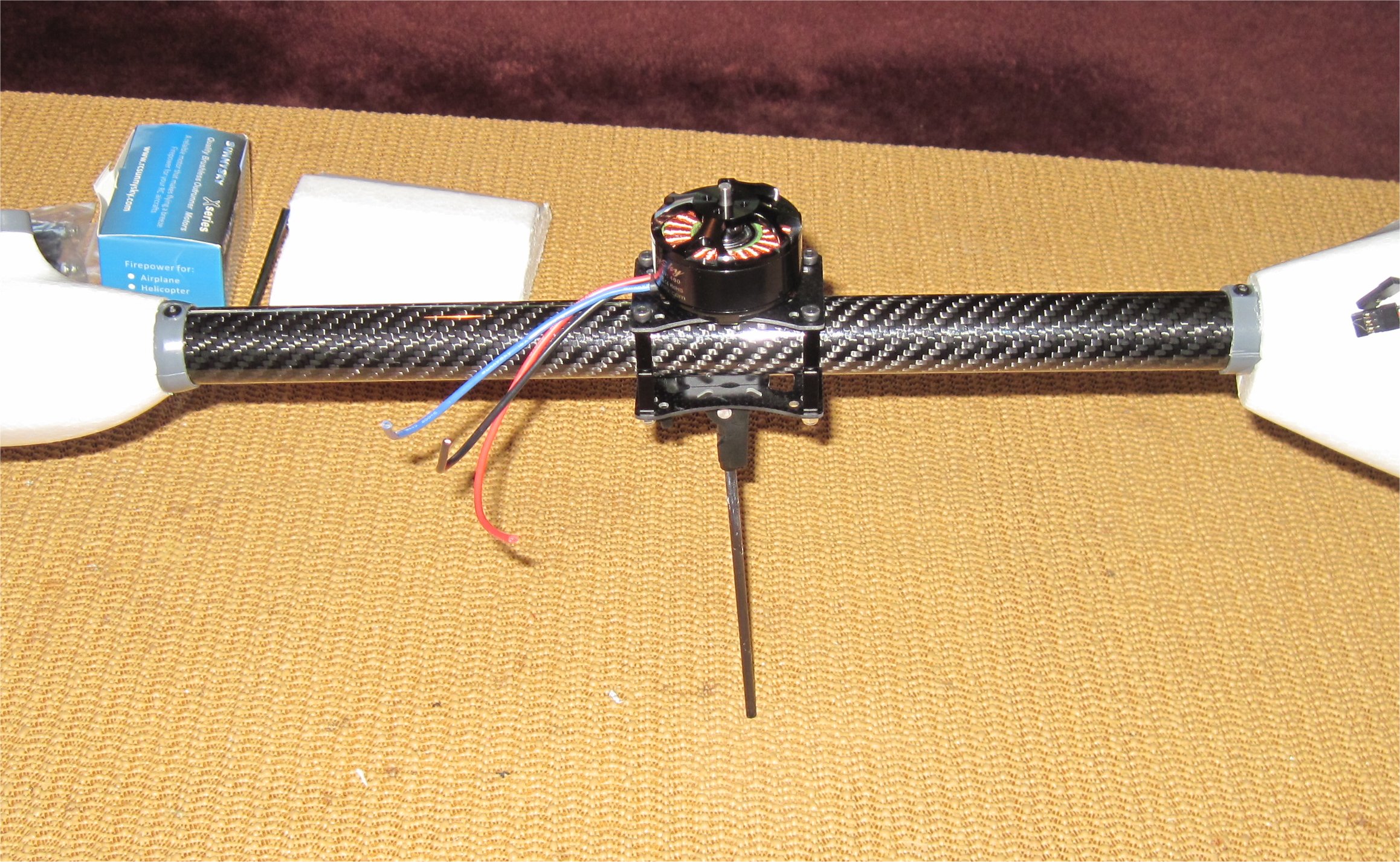
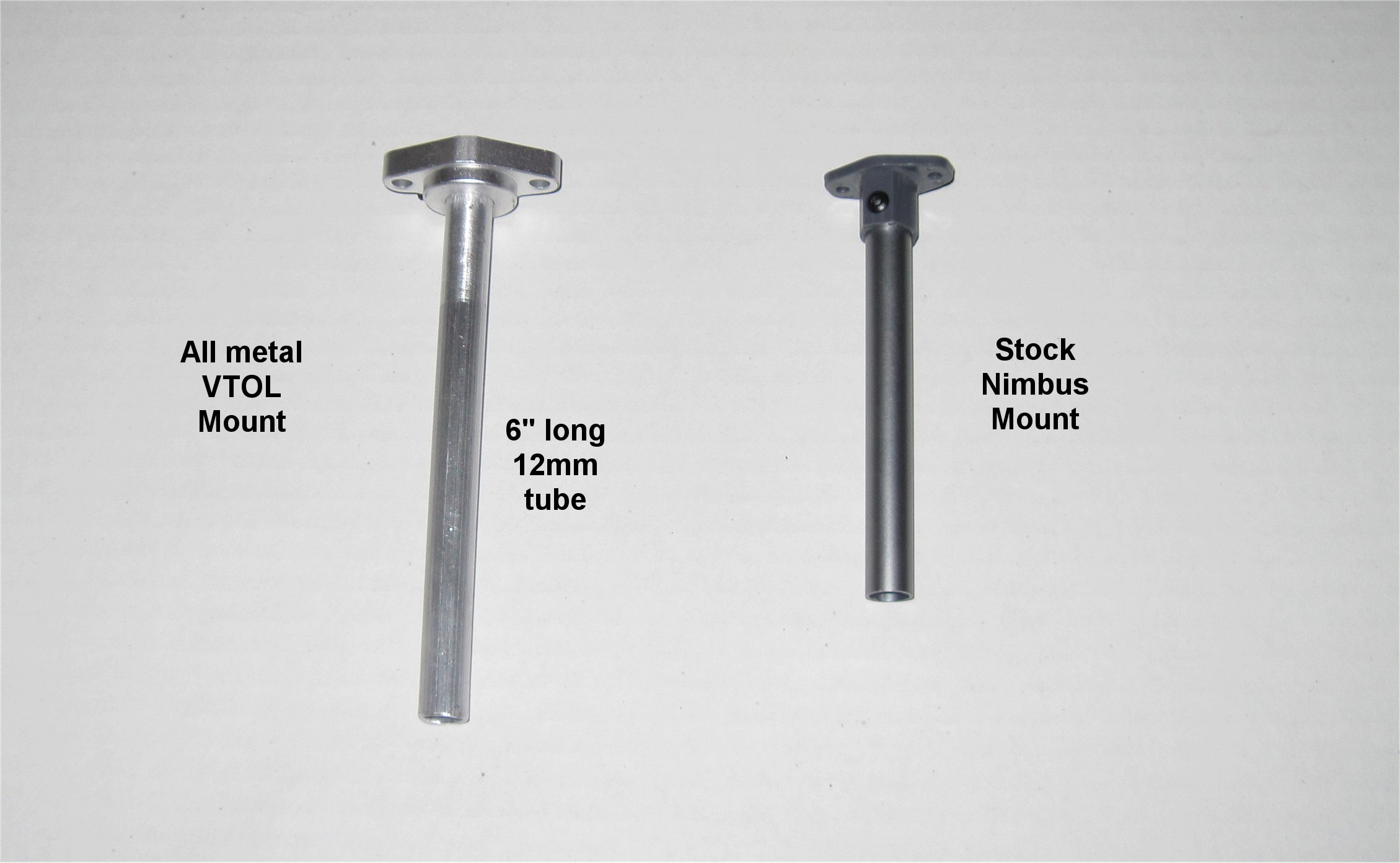
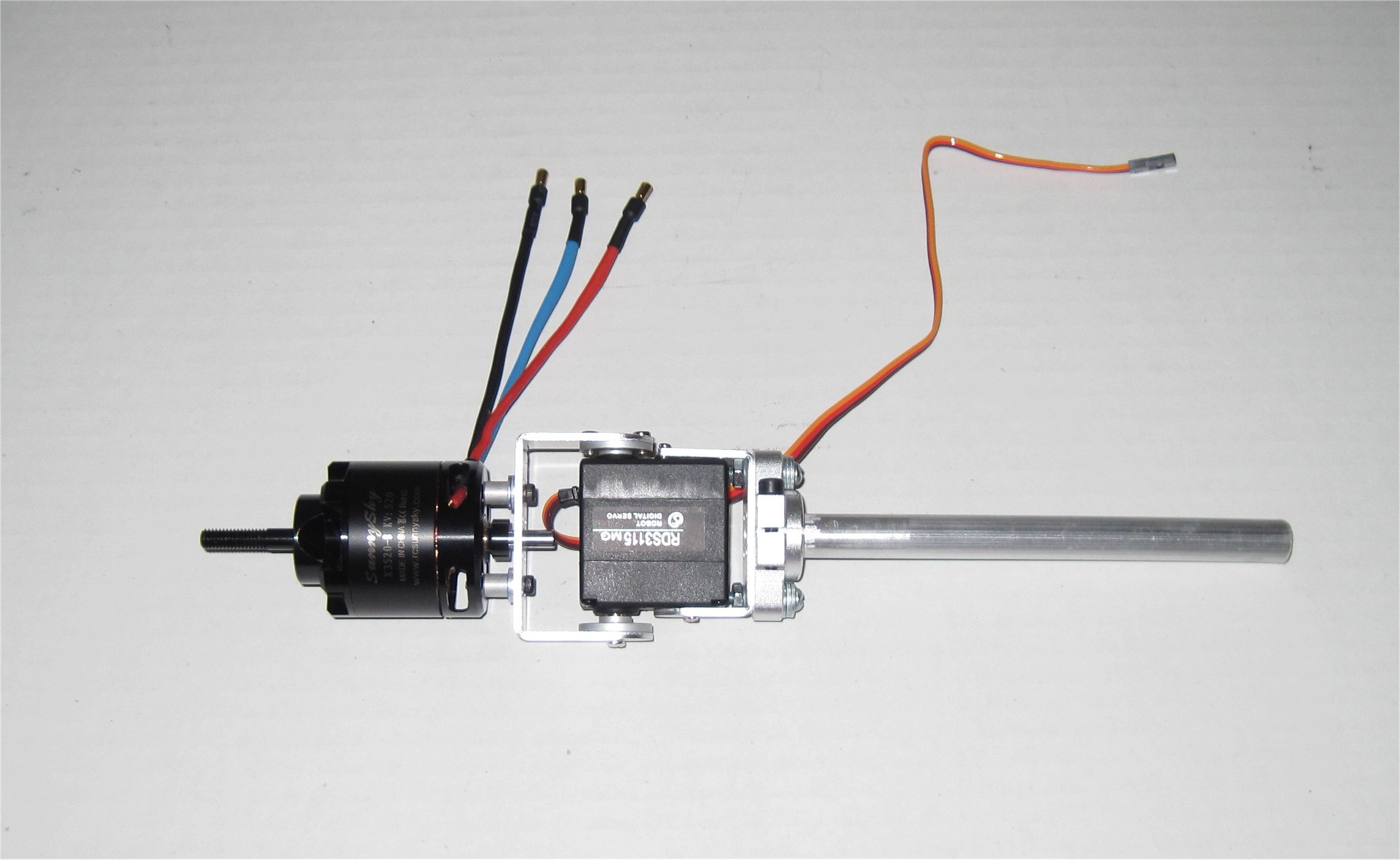
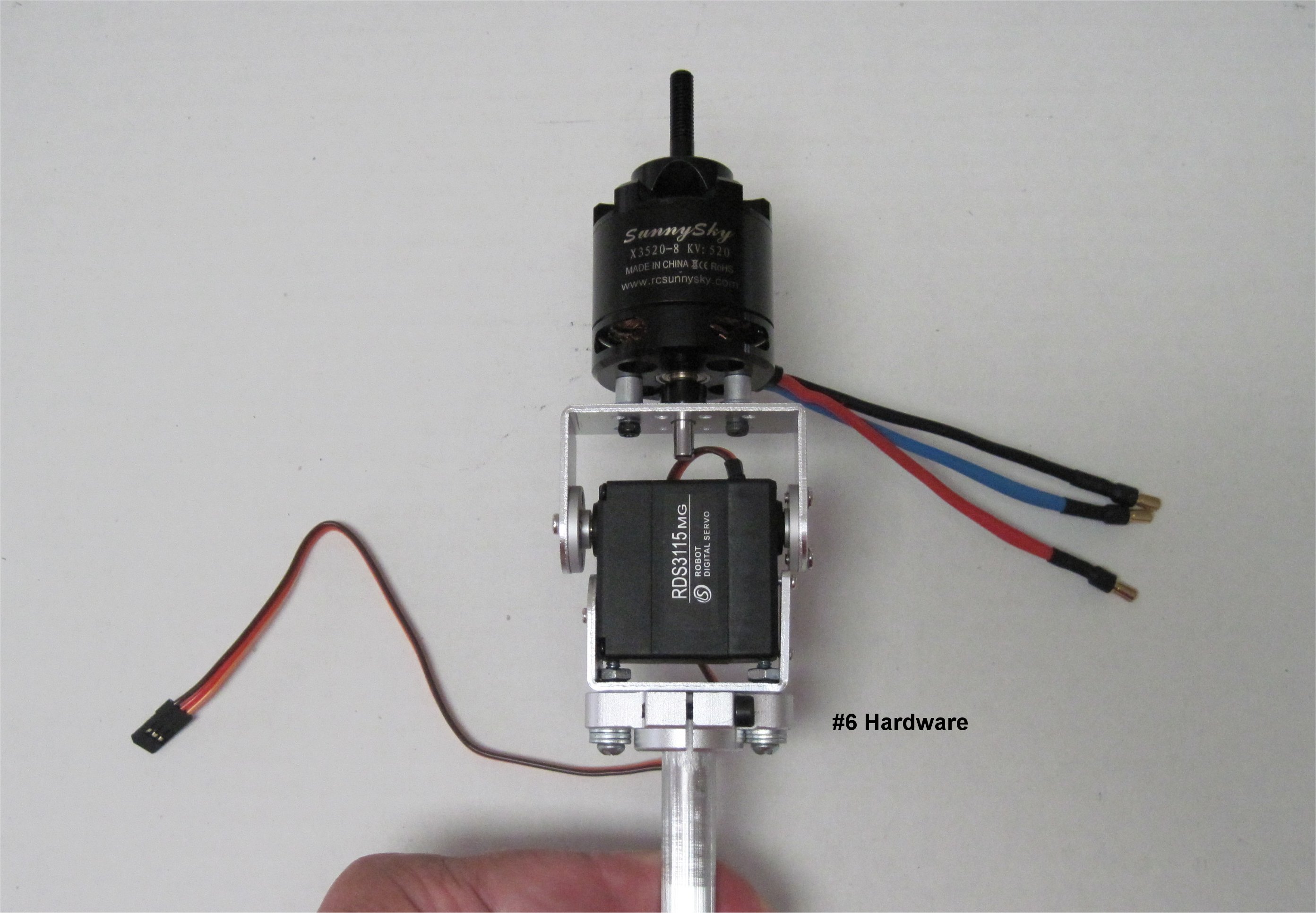
I finished one of the two motor mounts using an aluminum replacement for the stock plastic motor mount. Since I am mimicking the FoxTechFPV version, I used their images to cut a 6" length of 12mm aluminum tube. The 12" long 2mm thick aluminum tube was simply cut in half. The SunnySky 3520 520Kv motor is offset from the servo mount (using aluminum standoffs) to allow the longer shaft separation from the servo. Everything seems nice and solid and it fits in the stock wing receptacle.
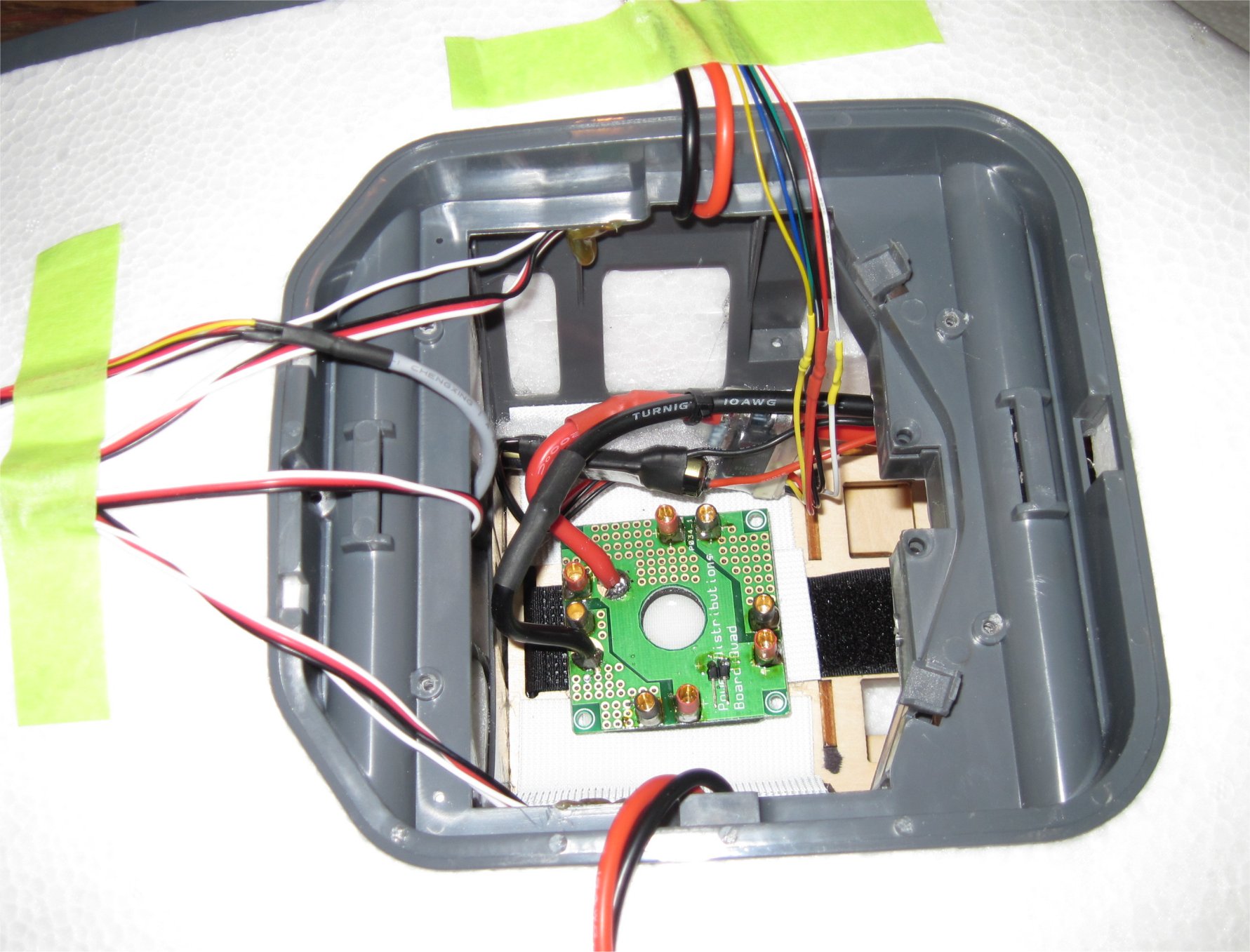
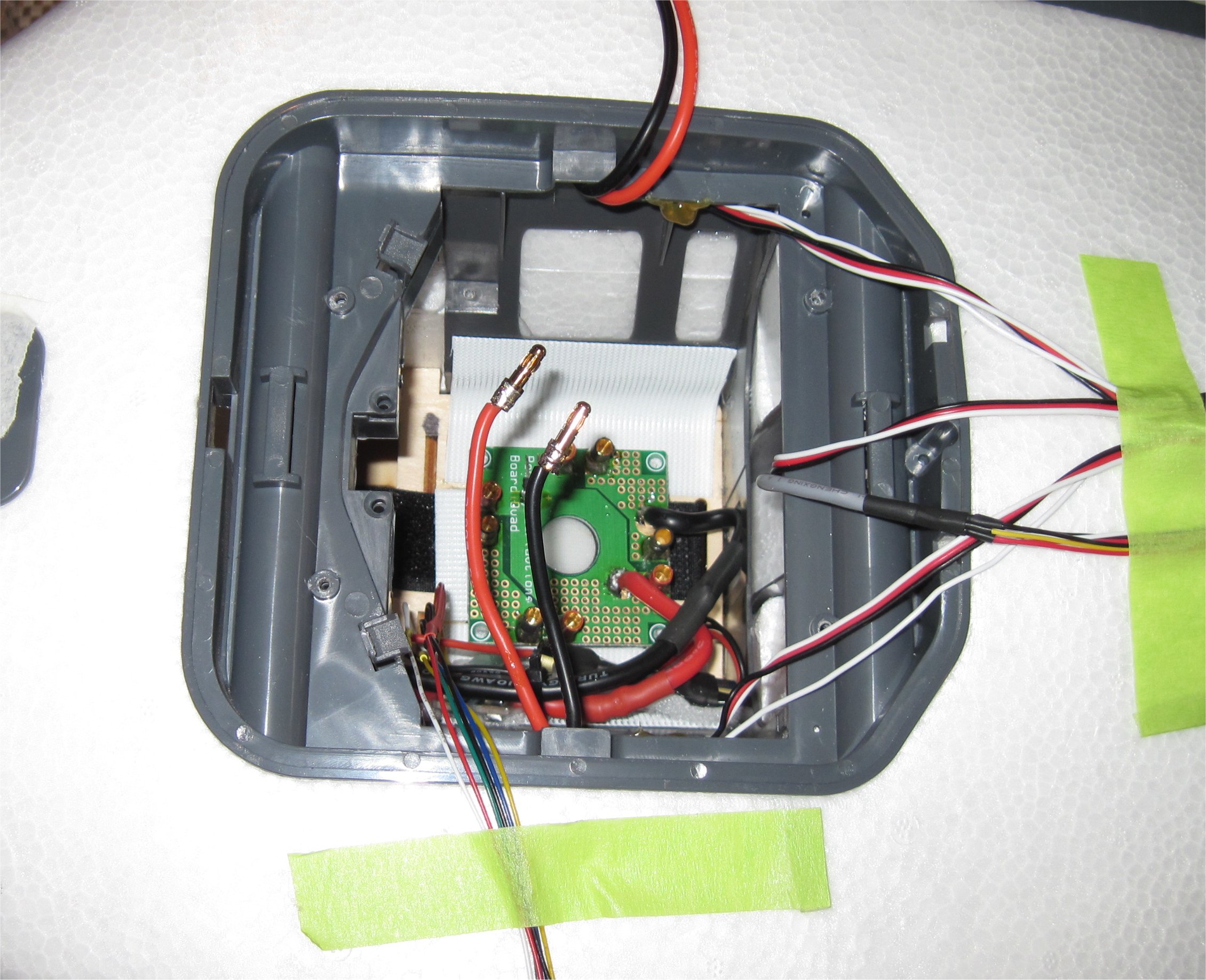
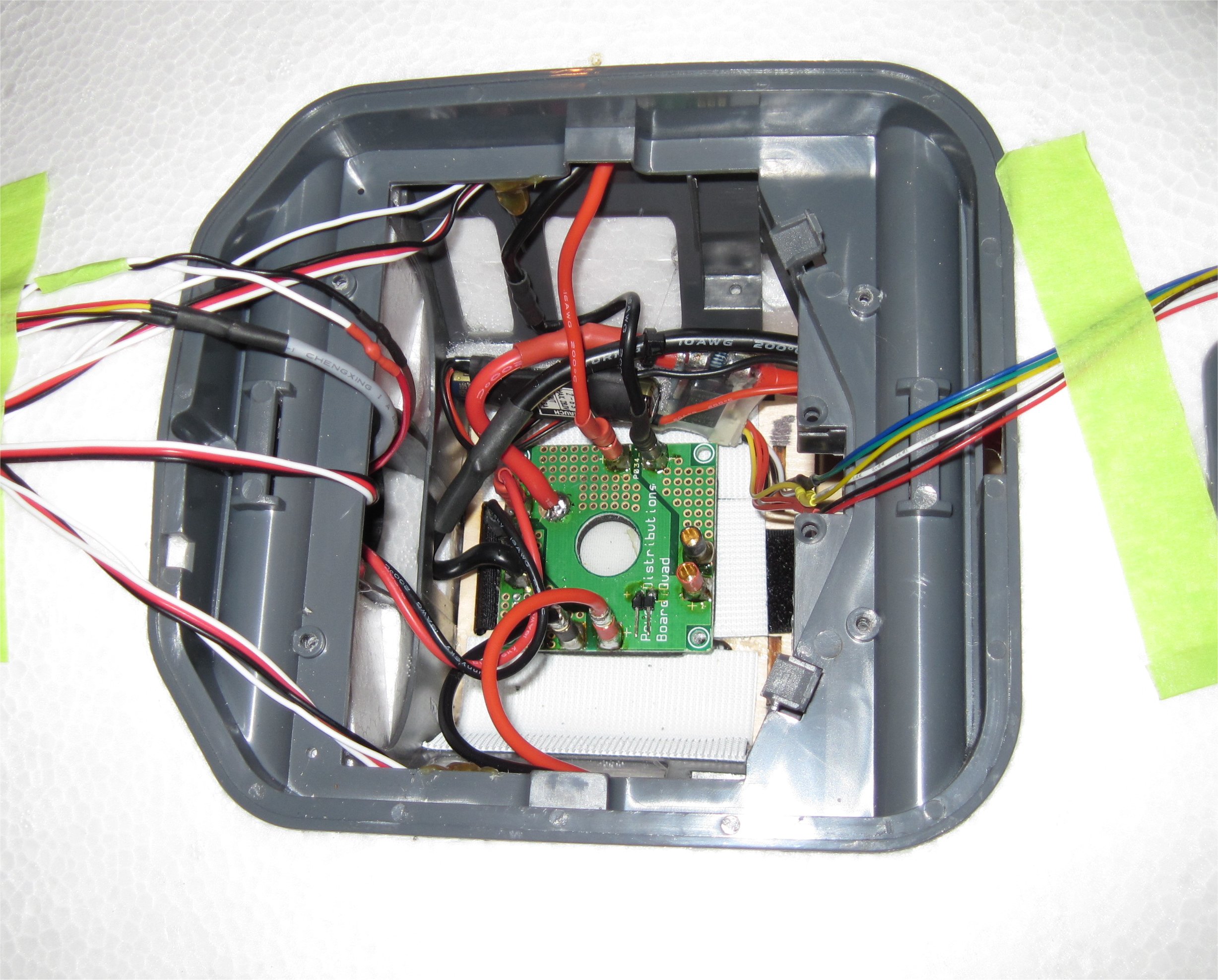
I haven’t seen how FoxTechFPV wires their internals nor have I seen many posts on it so here is my technique to make good use of the limited space in the Nimbus 1800.
I started with a HobbyKing Quadcopter Power Distribution Board and re-soldered the 3.5mm bullet connectors to face up. I then soldered the mating connectors onto the stock Nimbus power wires. After installing my tail motor and ESC, this left me with the remaining 4th set of bullets for my 12v regulator and the JST pins for my 5v regulator. I ordered a combination Matek Duo 5v/12v UBEC that I may also use. The one side holds my Mauch PM with 5v Pixhawk regulator and the other open side will likely hold my M8N receiver.
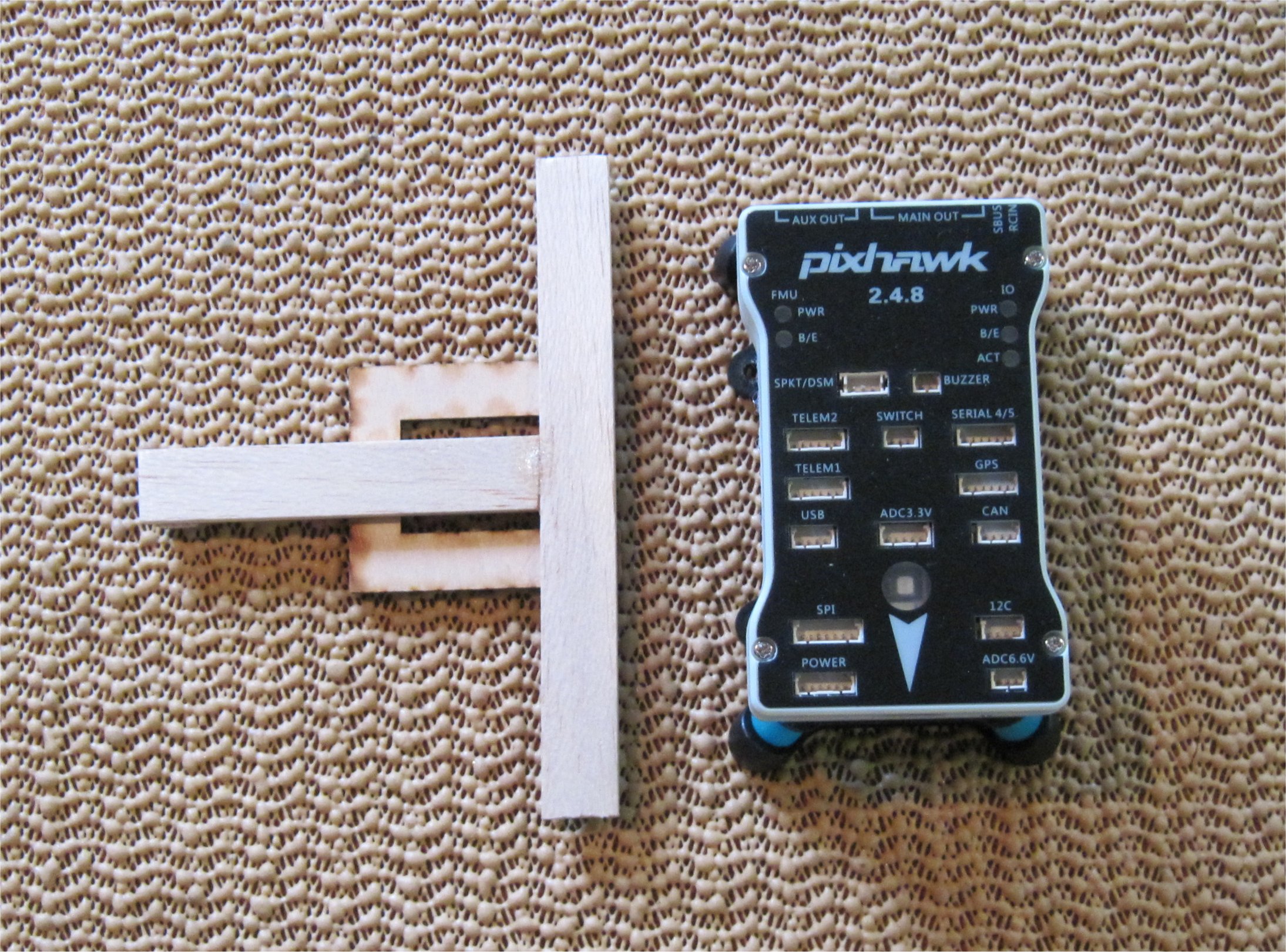
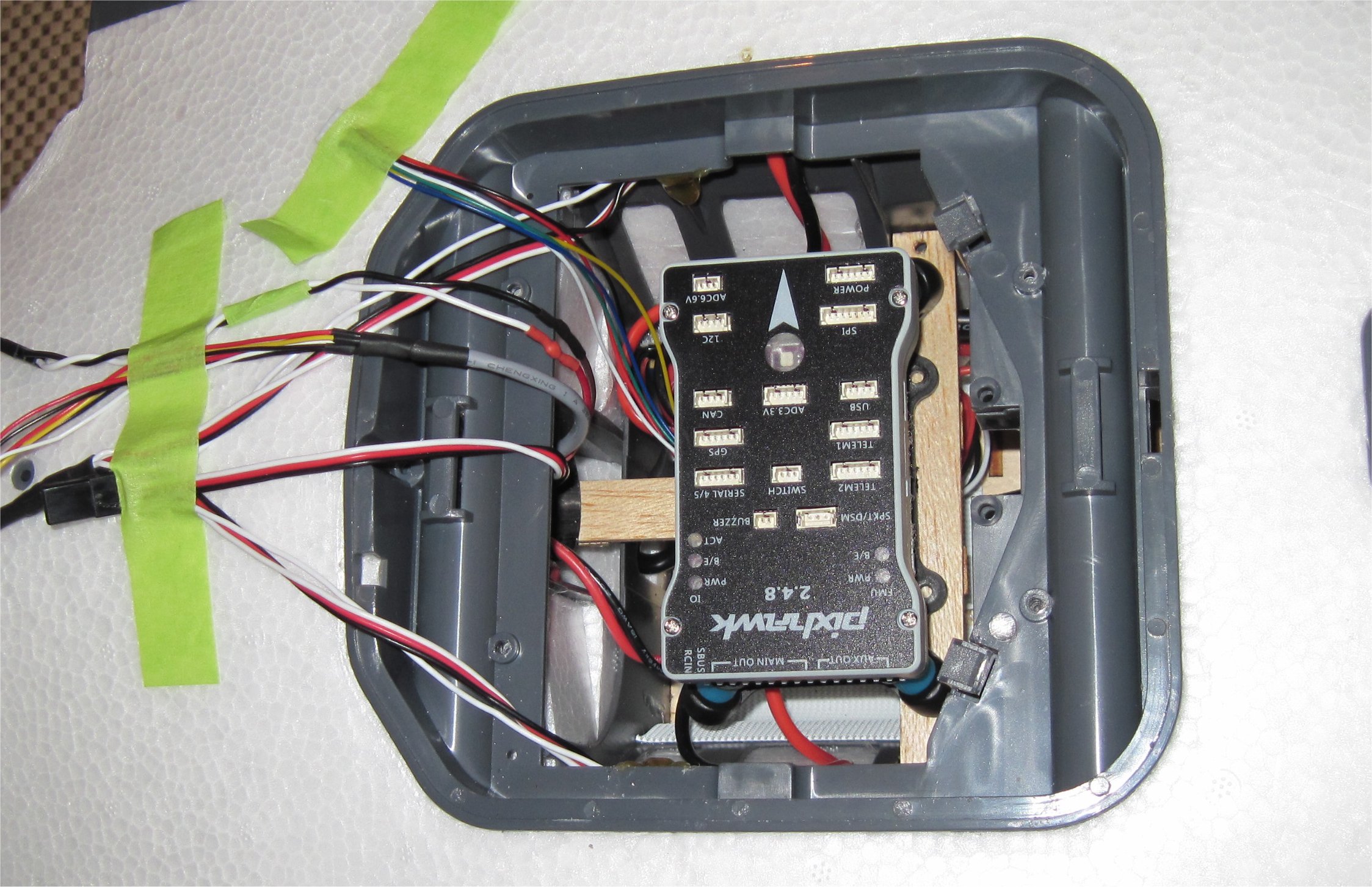
By using only the lower portion of the housing for wiring and electronics, it left me with the entire upper portion for the Pixhawk. I made a simple cross brace that mounts to the flat steps you see with the holes already in the plastic frame. The third leg of the brace simply sits across the same level opening on the rear plastic housing. So two screws hold the brace to the housing and two screws hold the Pixhawk vibration dampening mount to the brace. There is now plenty of space to connect wires to the Pixhawk and I can still use the stock top plate (which is easy to remove) that came with the Nimbus 1800.
Seems your project is progressing. we replace our aileron with hitech servos. Its fast responsing now. our issue now is the vtail. Seems the servo we put HENGE cant center the controls surface on the vtail once we push the pitch. Still accessing if the issue is with the servos or binding.