Sorry It did not load on my post. Here is the Logs,
Nimbus had a broken wing and tail fin, which are repairable. It now works already. But I think there is an issue somewere when we test it on the ground.
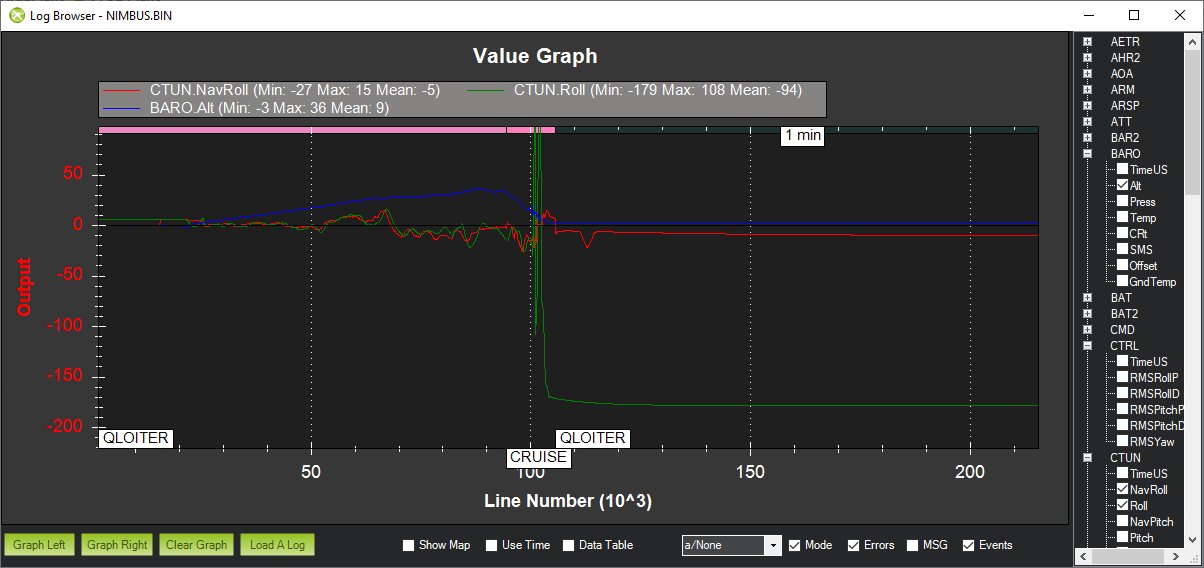
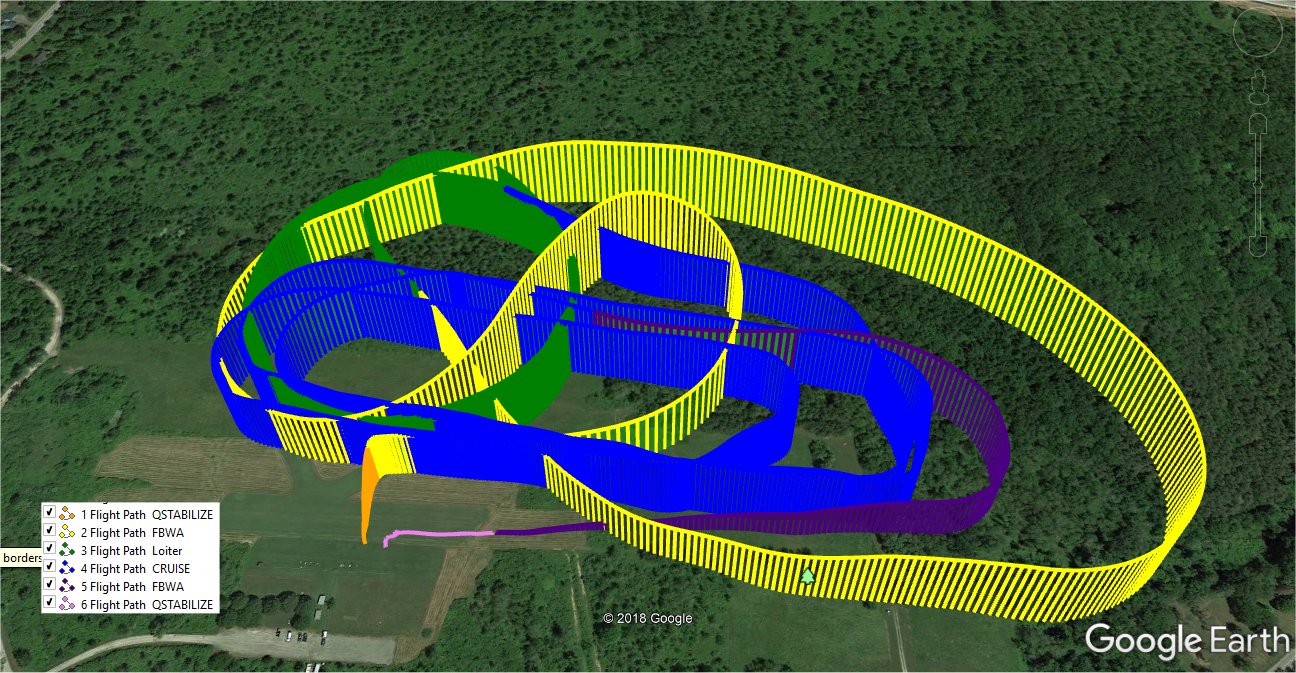
The first thing I see is that the flight controller thinks it was commanded to CRUISE mode and then back to QLOITER at your 30 meter height. I have seen this issue make my Convergence VTOL crash as well. In my case, I accidentally changed flight modes incorrectly on the 6-position knob but APM Plane didn’t recover properly using v3.9.8 firmware.
Below, the blue is altitude, green and red are Roll and NavRoll respectively.
It was only 30secs during take off before the incident happens. My pilot was telling there was no input on. Nimbus maybe just around 100 mtrs away from the LZ.
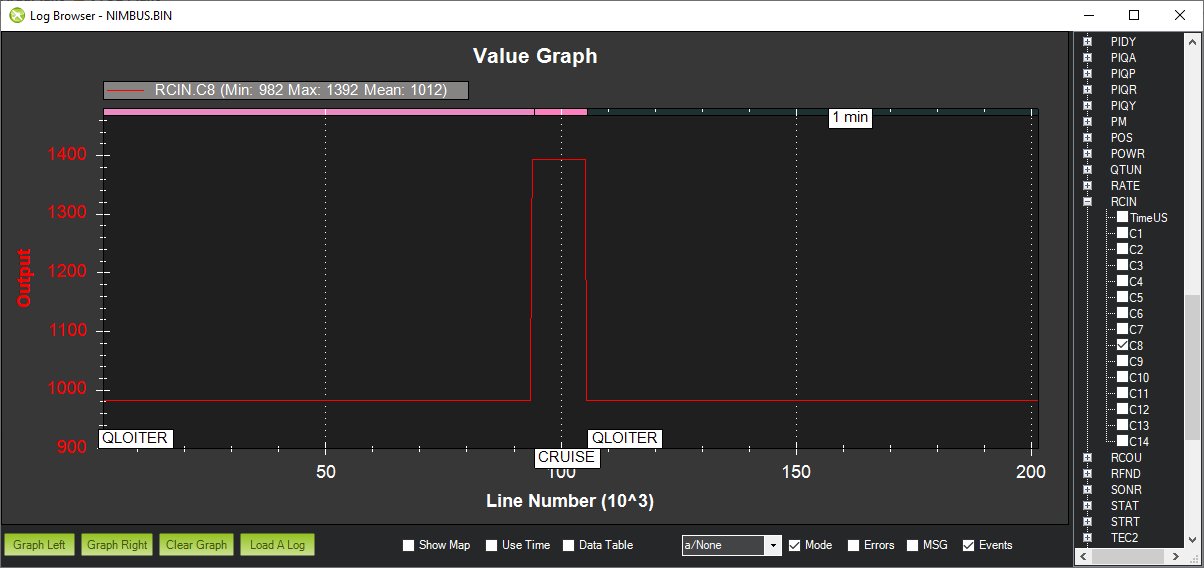
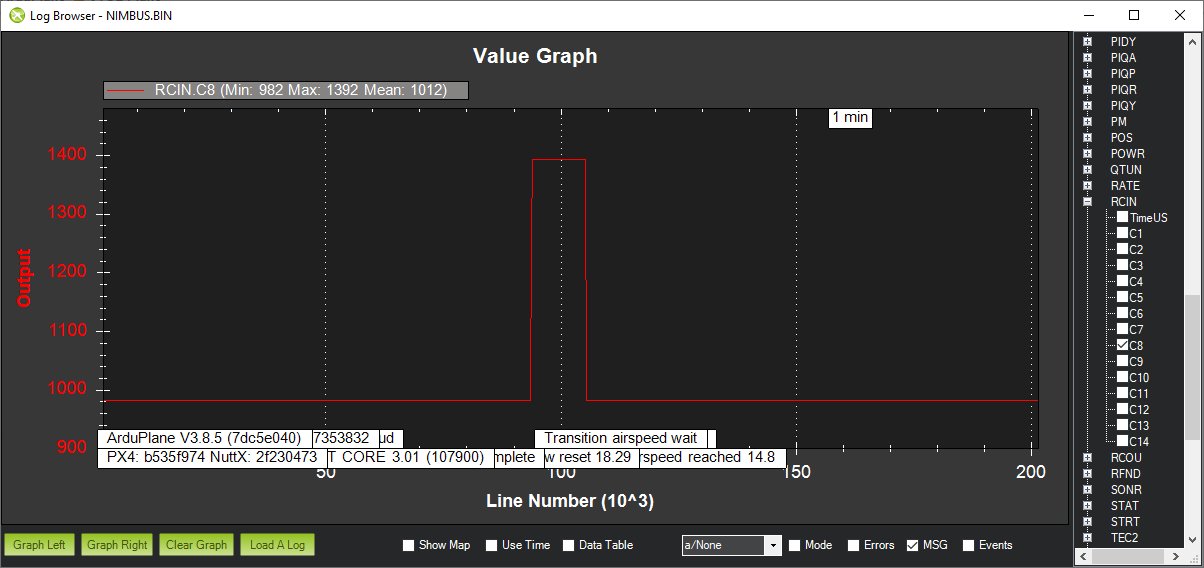
It seems weird that it transition to cruise mode. The 2 Fmode on the switch should be FBWA.
50 long range flight for the nimbus was great already.
We were able to hover the NIMBUS V2. S1= Mavlink Telem has different approach on connection.It uses higher baudrate. System Motors Idle once arms. D16 Rc have the spring on the Throt. Expect it always in mid position. The funny thing is the RC was in MODE 1. It can be easily fixed if your a mode 2 flyer by going to Mapping Channel menu.
Motor power seems satisfying. Tricopter Tune was very stable in windy condition. Will try to maiden it in Fixedwing this coming weekend. Will let you know on the updates.
Thanks to Rolf’s (@Rolf ) suggestion, my SDP33 AS Sensor arrived today. I’ll be away on vacation this week but will install it and test it out on my Nimbus next week.
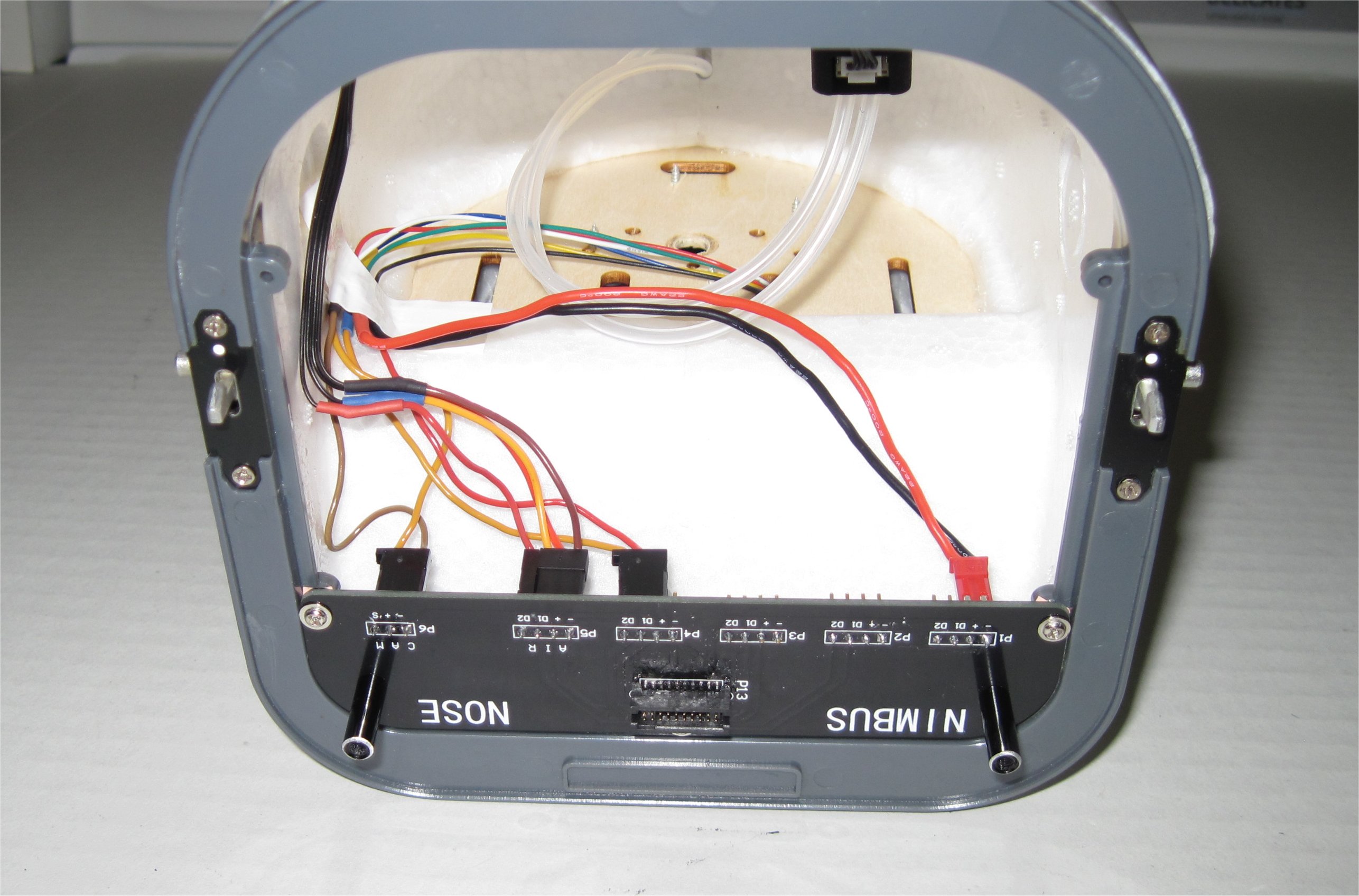
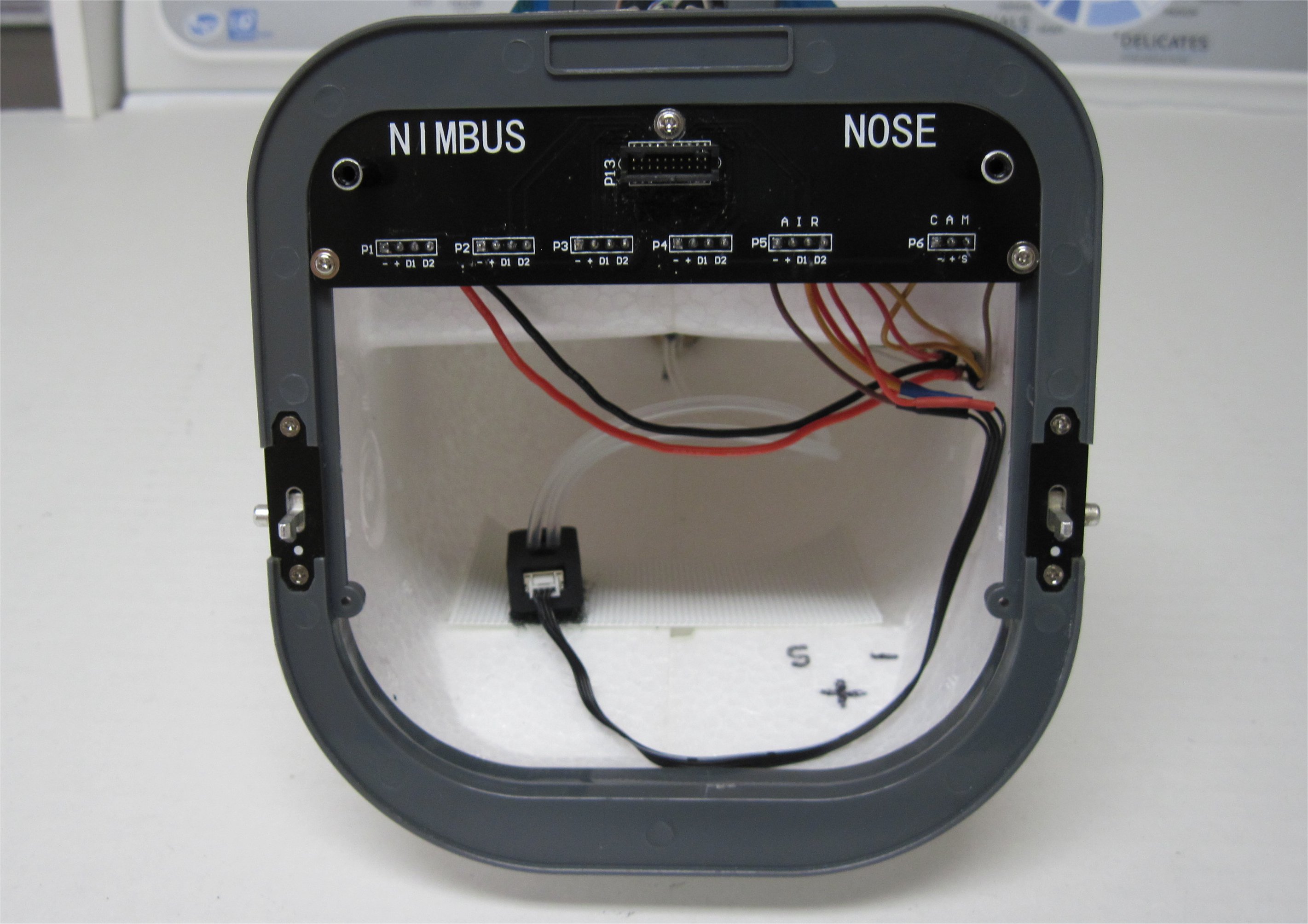
Hey Greg, one thing you may want to consider is not connecting the static port on the pitot tube to the airspeed sensor but rather leave the tube from the AS open inside the nose (perhaps wrap some foam over it) as the static port is subject to interference from the props during copter mode. I’ve read and heard of issues arising as a result.
It’s an interesting idea but I wasn’t aware of the AS sensor being used in Q modes. Forward transitions perhaps. On the Nimbus, the nose and AS sensor are forward of the props in all flight modes.
I mounted my SDP33 without issue other than needing a custom cable to attach it to the Nimbus nose pins. I also needed to add the I2C bus expansion board since my external compass was plugged into the Pixhawk 1 (v2.4.8).
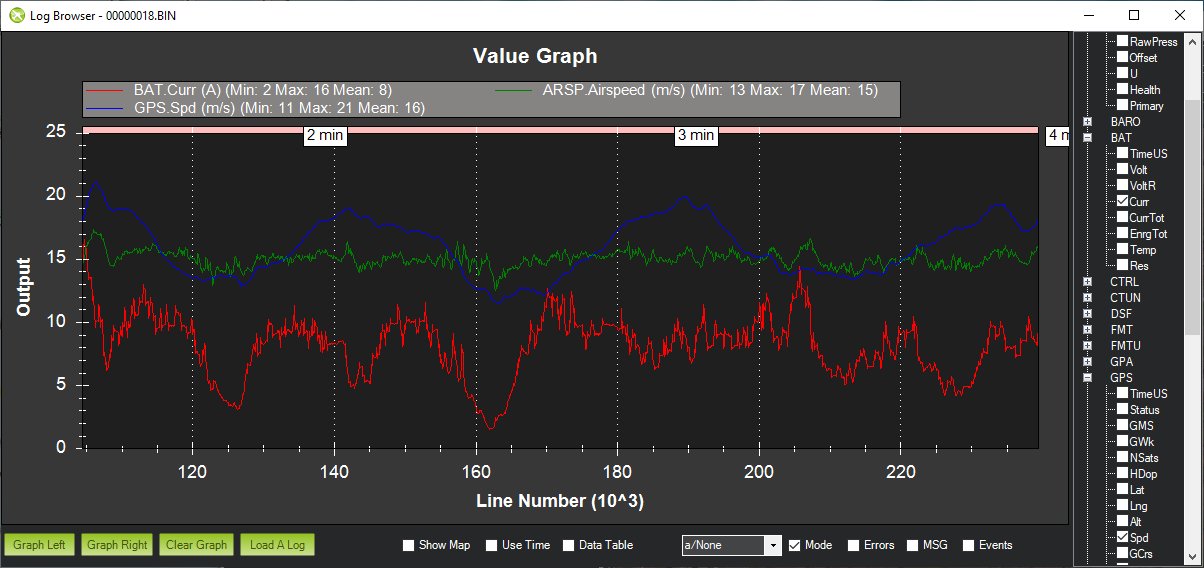
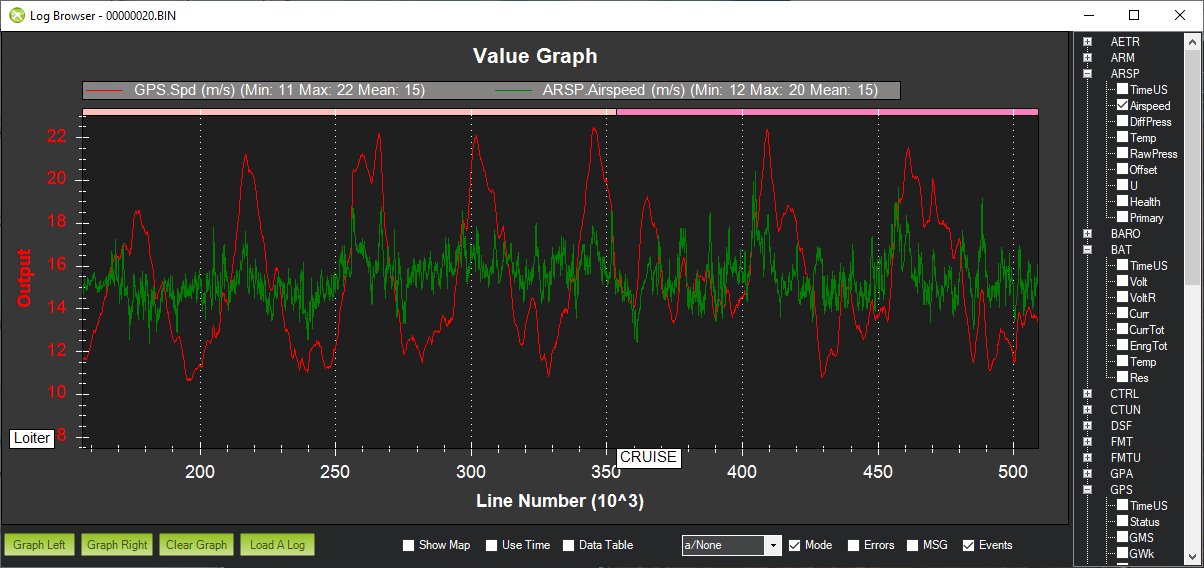
I changed ARSPD_TYPE to 6 and ARSPD_SKIP_CAL to 1 per some help from Rolf. Also, for the first flight, ARSPD_USE is set to 0 and ARSPD_AUTOCAL is set to 1. A one-time calibration of ARSPD_RATIO according to the wiki is recommended. I will reverse those settings for the second flight after checking the Airspeed graph against the GPS ground speed. It looks operational by blowing into the pitot tube and viewing the Airspeed Gauge in Mission Planner.
I love my Nimbus VTOL and my new SDP33 AS sensor! After my calibration flight, I changed ARSPD_USE to 1 and ARSPD_AUTOCAL to 0 using QGC on my tablet and had a great 2nd flight with compensation of motor speed. No issue on transitions either.
2019-08-13T04:00:00Z Edited post since you can’t post more than 3 in a row.
I flew the Nimbus VTOL in some stronger winds and my SDP33 AS sensor continues to perform well. Without a payload underneath and only using the light Arkbird 2-axis gimbal and camera on the nose, I can fly quite slow and only see an occasional wing wobble. Center throttle was 15m/s. My current settings are shown below.
FoxTech has upgraded their Nimbus VTOL V2-Tilting System to use a longer carbon plate and add a grey plastic cover. This is designed to look cleaner and keep the wires safer.
I have the V1 tilting system but have not used it yet because my original DIY version is still working fine. The V1 tilting system came out after my wing assembly was complete. I haven’t had any problems with my DIY setup but it is nice to see improvements for future builds, especially for those using the Nimbus VTOL professionally.