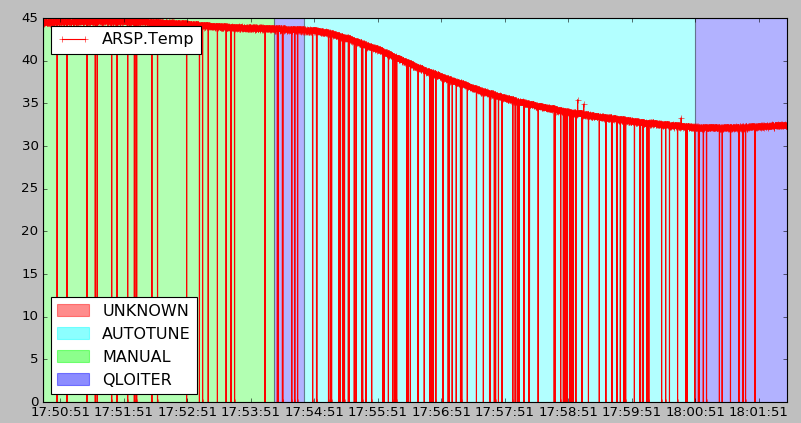
It looks like a cabling issue. The key thing to look at is the ARSP.Temp reading, which is the airspeed temperature:
The good news is it shows the issue even when you are on the ground. I suggest you put a good logic analyser (eg. Saleae Pro) on the I2C pins and see if you can spot what is happening. Also try without the differential extender.
Cheers, Tridge