Ok, thanks, guys. It’s good information. I remember Graham’s current seemed to measure high. What is your current draw at those speeds?
Cheers!
Ok, thanks, guys. It’s good information. I remember Graham’s current seemed to measure high. What is your current draw at those speeds?
Cheers!
My NImbus is around 4.150 grs weight (payload and 10Amp battey included), and in CRUISE mode it flies quite well at 16m/s airspeed, drawing current in a very reasonable way.
Now I’m waiting for a calm day to try to test my DIY 9.000 mah Li-ion battery, wich will reduce the weight in 150 grs.
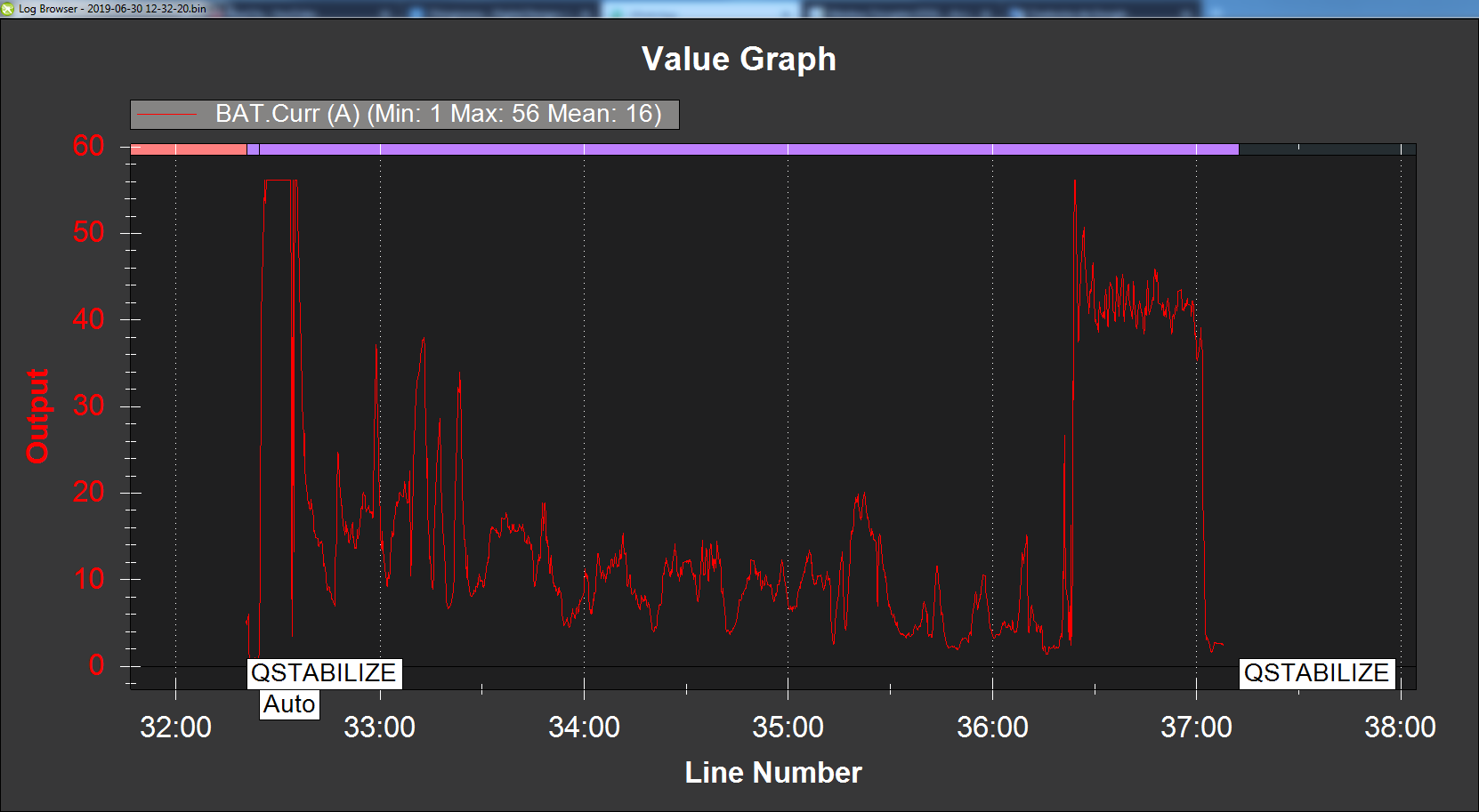
My mean current draw at 13m/s is 9 amps.
Very good!
I got another flight in today on my Nimbus VTOL. It was quite windy but it still flew with authority! I had my 2-axis gimbal camera mount for FPV video downlink and took a few photos. Have I mentioned recently how much I like plugging in the wings, tail, and battery pack? 
these past months I’ve been listening to you that you could not fly, so now I’m glad to see that blue sky
Thank you, Aticof. It is good to feel the sun and fly again.
I would like to share with you my last 3D thing designed for the Nimbus. It is a mount for Mapir Survey3 cameras. Recentrly I bought a GitUp G3 90° FOV camera, with 12 MP resolution. It is exactly the same as the Mapir Survey 3 (RGB).
This camera can be triggered directly by pwm pulses from pixhawk, using only a 3 wires cable (hdmi connector) I’m planning to do mapping with it, and now I’m in the middle of test processes. My last test was a survey (corridor), in which I forgot to disable automatic triggering from camera settings, but everything was indicating that this camera might do the job.
The mount, plus camera add a payload of no more than 135 grs, depending on the printing quality.
rortega,
Thanks for posting your printed camera mount. It looks universal for holding many different cameras.
I like your green Nimbus VTOL too! It landed nice and slow. Are these default settings for landing? If not, can you share your param file?
Cheers!
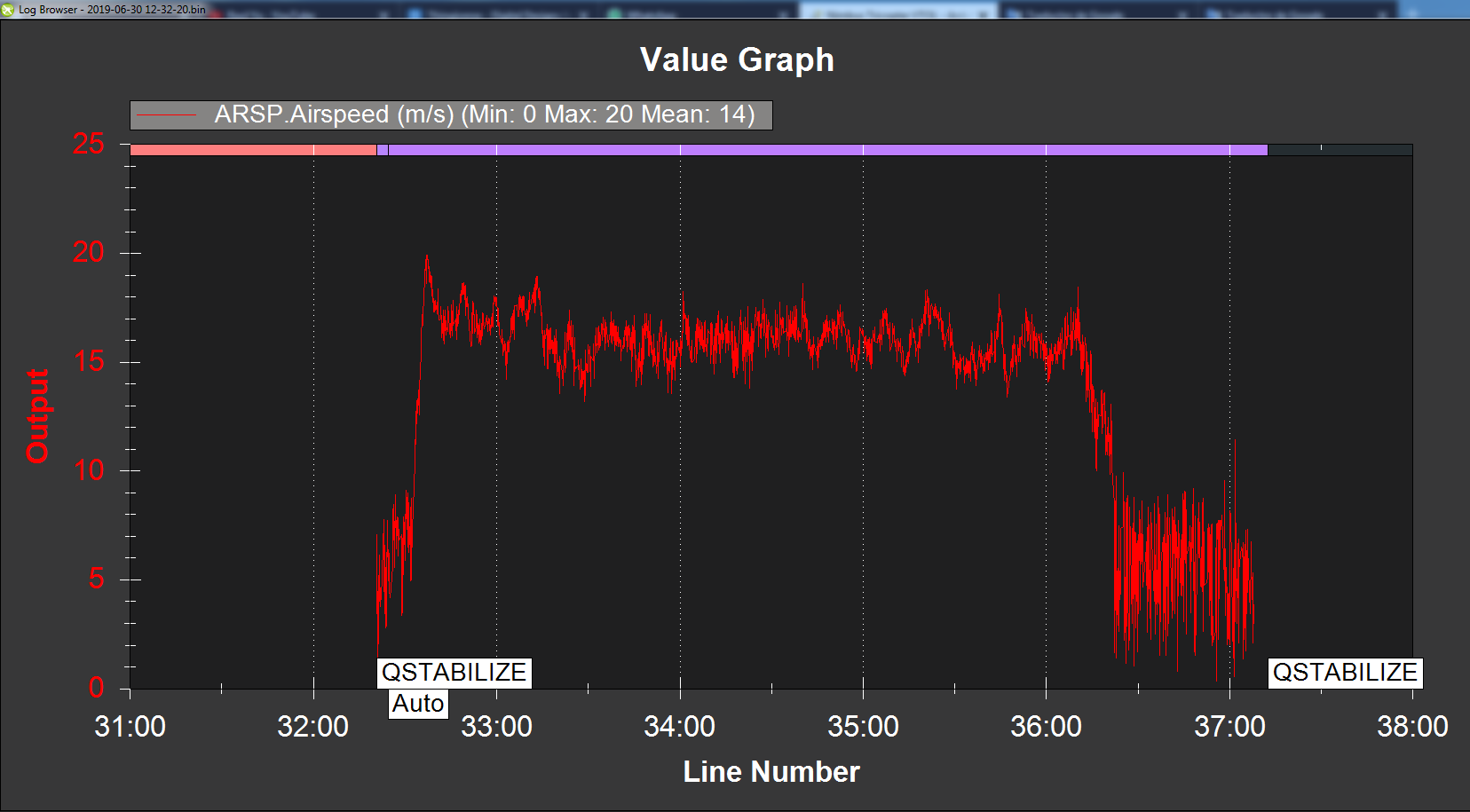
Here you are 2019-06-30 12-32-20.log.param (16.8 KB).
I followed Aticof’s Y3 tutorial and some tips from him.
Very nice, thanks for posting!
I did some reading in the Wiki and re-discovered why my mid-throttle airspeed was between 25 and 30 m/s and not the more conservative settings in ARSPD_FBW_MAX and ARSPD_FBW_MIN. It was because my AS sensor was not working. Once I re-enable the AS sensor, it should start flying slower.
If you have an airspeed sensor then the throttle will control the target airspeed in the range
ARSPD_FBW_MINtoARSPD_FBW_MAX. If throttle is minimum then the plane will try to fly atARSPD_FBW_MIN. If it is maximum it will try to fly atARSPD_FBW_MAX.If you don’t have an airspeed sensor then the throttle will set the target throttle of the plane, and Plane will adjust the throttle around that setting to achieve the desired altitude hold. The throttle stick can be used to push the target throttle up beyond what it calculates is needed, to fly faster.
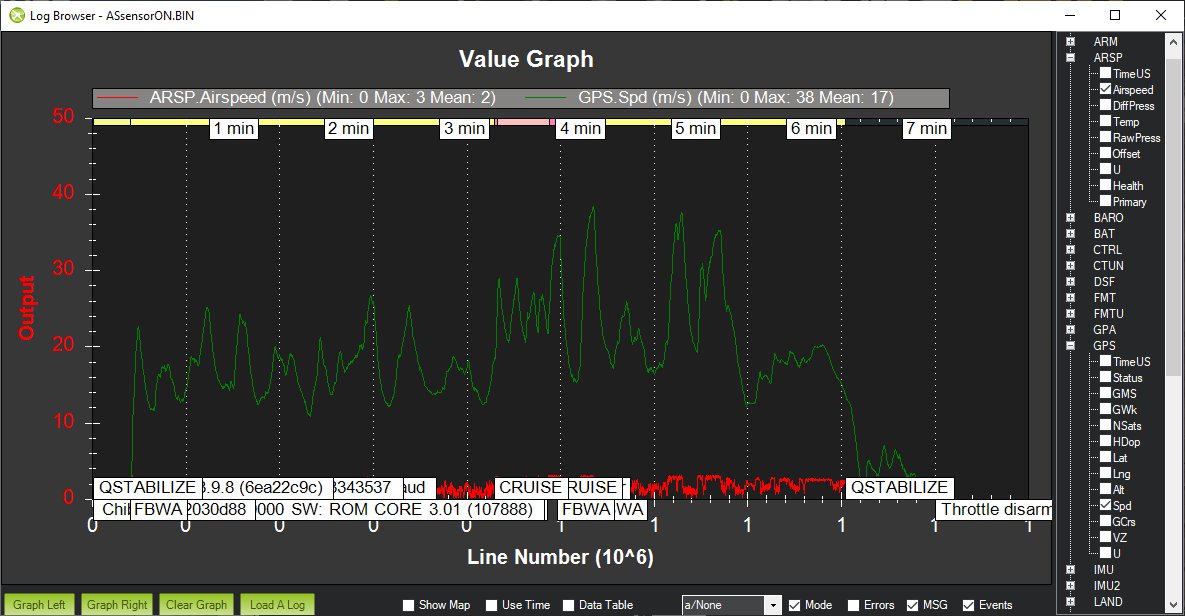
I’m still having trouble with my Analog Airspeed sensor. Perhaps someone can spot my issue. It appears to be set up correctly since I can blow into the pitot tube and get the Speed gauge in Mission Planner to go up to 30m/s and also watch it bounce between 0 and 2 when just sitting static.
When ARSPD_USE is set to 0, it transitions and flies great! However, when I set ARSPD_USE to 1, it clearly doesn’t transition to FBWA well and continues to keep the front motors pointed slightly upward. Is there another parameter I am missing or is my Speed gauge test assumption invalid? I’ve used these type of Analog AS sensors in previous applications using earlier versions of Plane without issue.
Green is GPS Speed and Red is AS Sensor
NimbusVTOL_Flight5.param (17.0 KB)
Greg,
I am new in this - the AS is quite important to use.
If the Nimbus stalls at 11m/s and you have set GPS speed at 15m/s
as soon as you get a tail wind of more than 4m/s the plane will stall.
There is some where a setting that tilt rotors will come on in a stall situation
to assist keeping the plane in the air.
Of the track (SORRY) - i do not know how to post something please help
I had a few issues on my first flight which i would like to ask/share
My .bin file is 17Mb can it be posted?
Hi Greg,
From your graphic can be seen, that the airspeed sensor measures too low. You probably know that too.
But the following causes are possible:
Why not use the SDP33 - without need of preflight calibration.
Rolf
Hi Rolf,
Thanks for the suggestions. I guess that I will be stuck to upgrade my AS sensor since you cannot rely on using the Speed gauge in Mission Planner as a sanity check. In previous applications, these analog sensors have worked fine so this would be my first bad one. The only other change is in using newer Plane v3.9.8 firmware. My tests have been repeated with the same results so why does the Speed gauge in Mission Planner work? Perhaps it is a false positive.
Marcel,
Welcome to the forum! Look at the Q_ASSIST_SPEED parameter. Most users have this set to 11 m/s.
To post a .BIN file, you need to host it somewhere and then add the link to it in your post.
Cheers!
To clarify: the Speed gauge in Mission Planner does seem to work properly in my setup. It bounces from 0-2 without air and I can blow into the pitot tube and watch the needle go up to 30 or 40 m/s.
Is there another way to ground test the AS sensor operation?
I read something wrote by tridge about testing aspeed with temp readings, if I can find or someone remember please post link for you.
Looks if Tridge comment is usefull, page 3
Greg uses an analog sensor that is not connected via I2C. Tridge describes a test to determine if the I2C transmission is working properly