We have recently added a new filter setup tool that should speed up the processes of filter setup. It can be found at: https://firmware.ardupilot.org/Tools/FilterReview/
The key feature is the ability to estimate the post filter results from a pre-filter log, this eliminates the need to do several post filter flights.
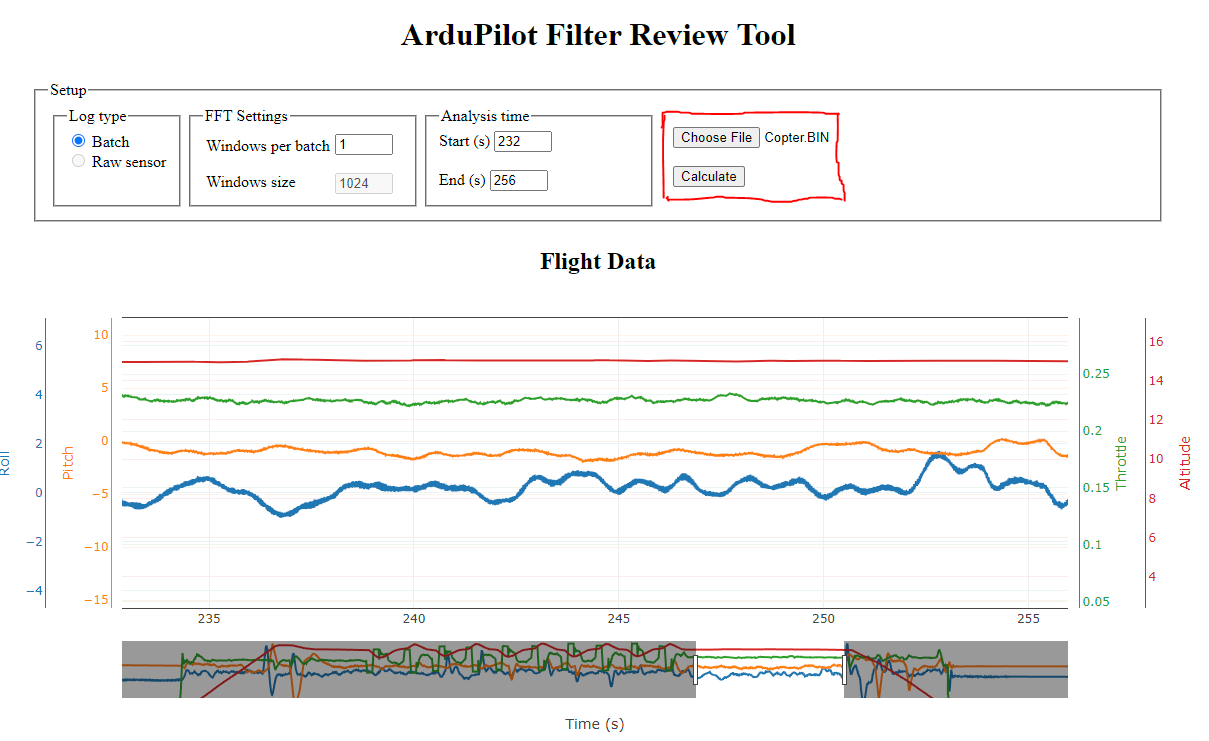
You just need a log with either “Raw IMU” selected in LOG_BITMASK or batch logging enabled.
Load the log and select a stable section in the flight data plot to for a clean look at the vibration profile. After selecting a section hit the calculate button. (Note that the it can take quite a while to processes logs, your browser might warn that the pages is not-responding.)
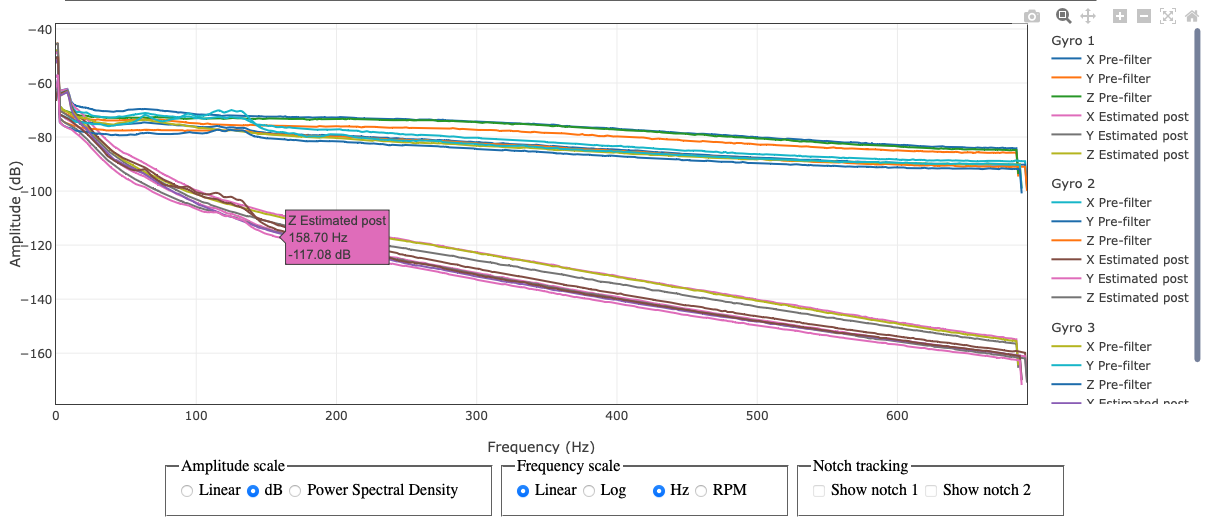
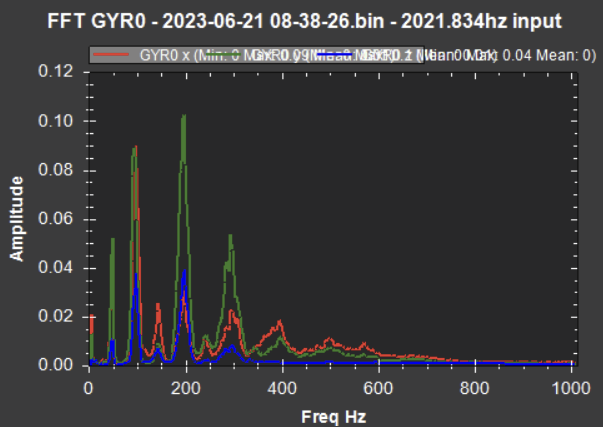
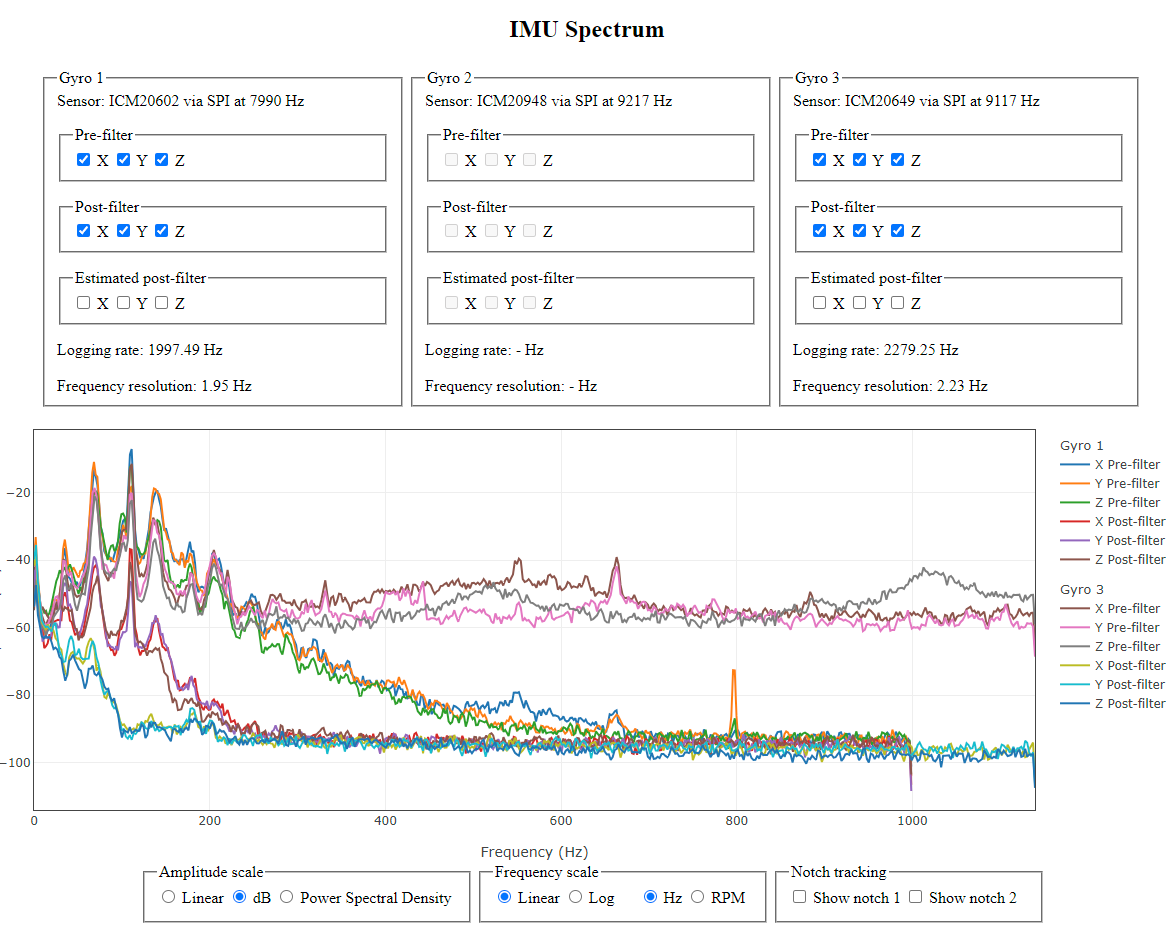
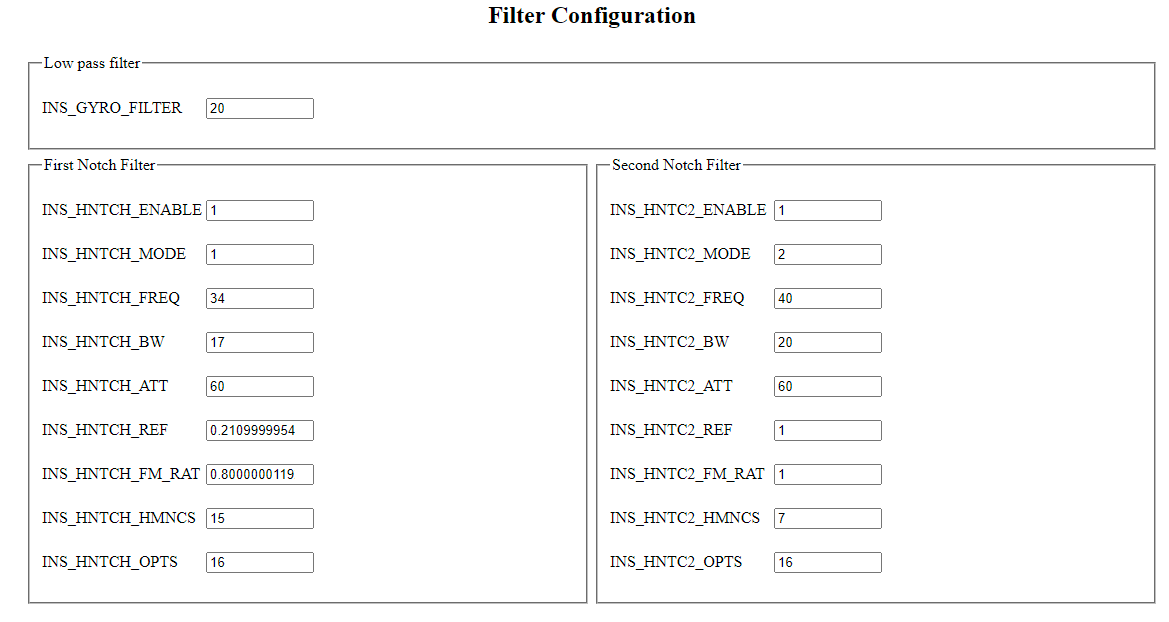
The FFT plot then shows the noise, as you may be familiar with from our other FFT tools. You can plot each IMU and each axis. There is pre-filter, post-filter and estimated post-filter. If pre-filter data is available a post filter estimate will be calculated, this estimate can be updated by changing the filter parameters and re-calculating the results (don’t forget to hit the calculate button).
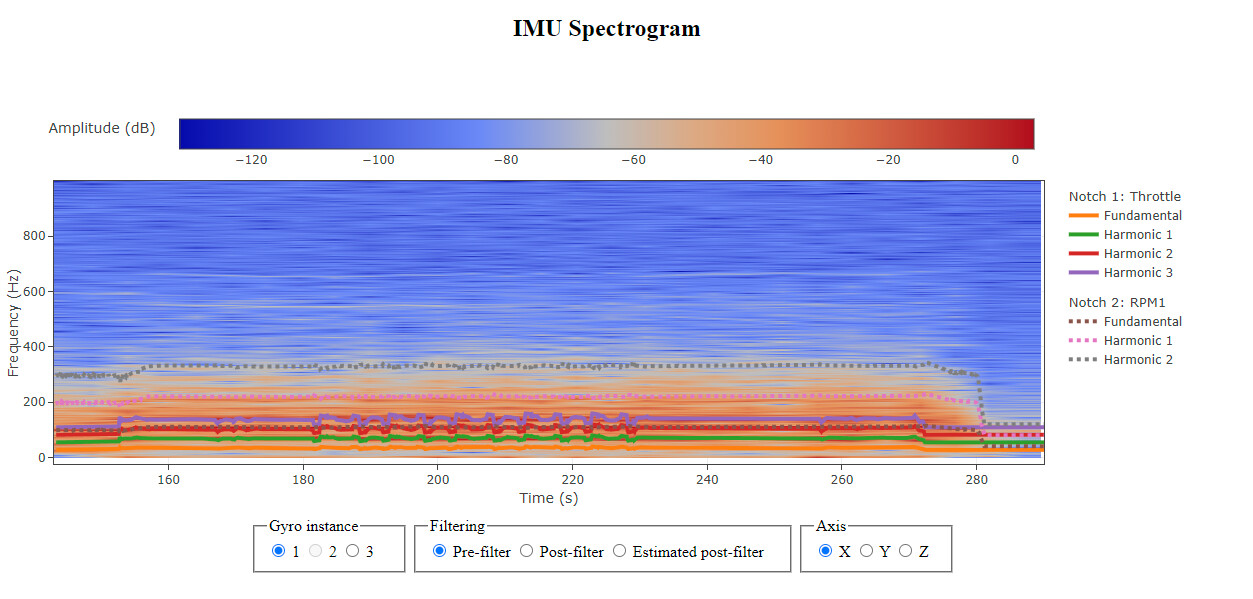
The spectogram shows how the noise changes over time and plots the notch tracking sources, the tracking should follow the peaks.
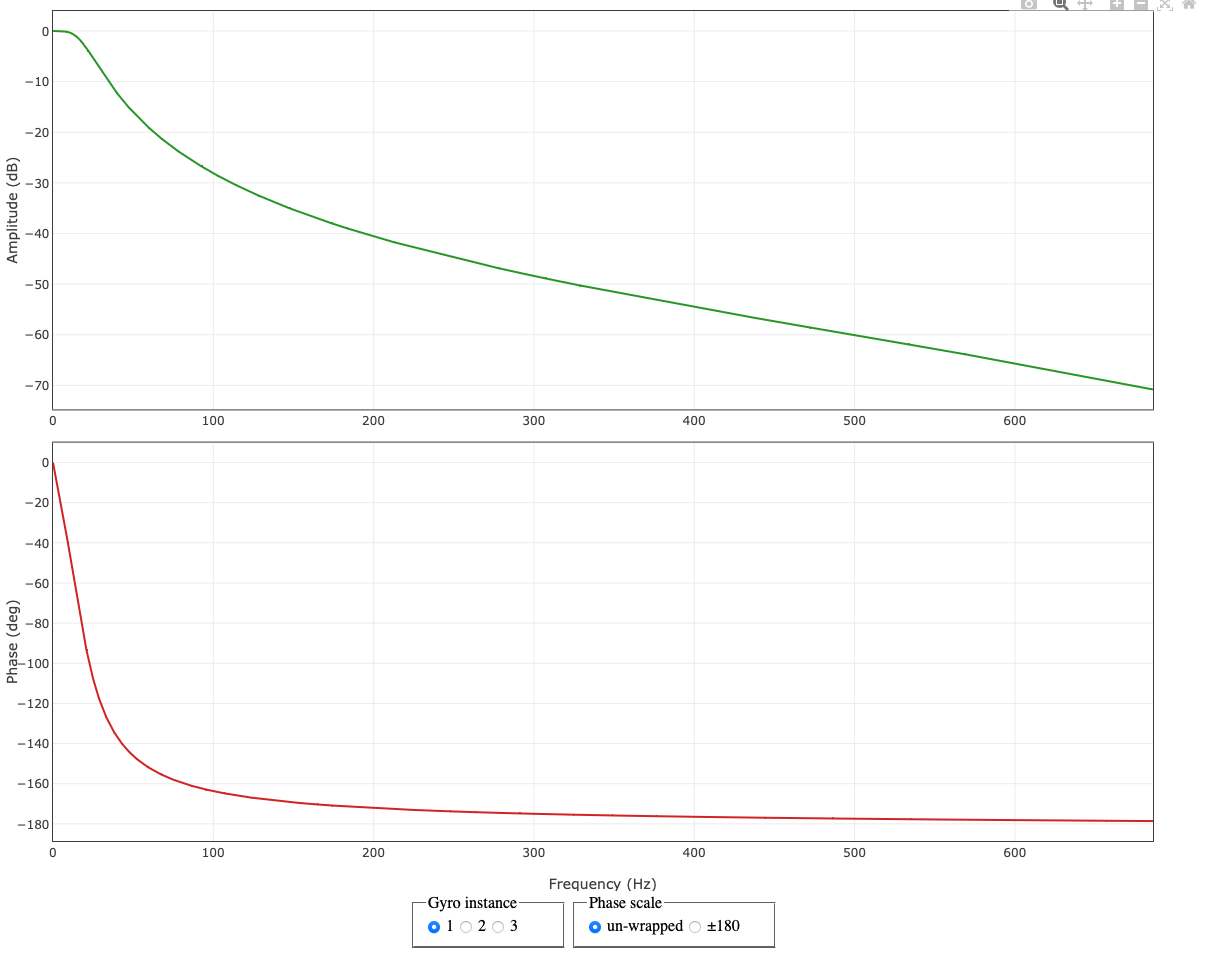
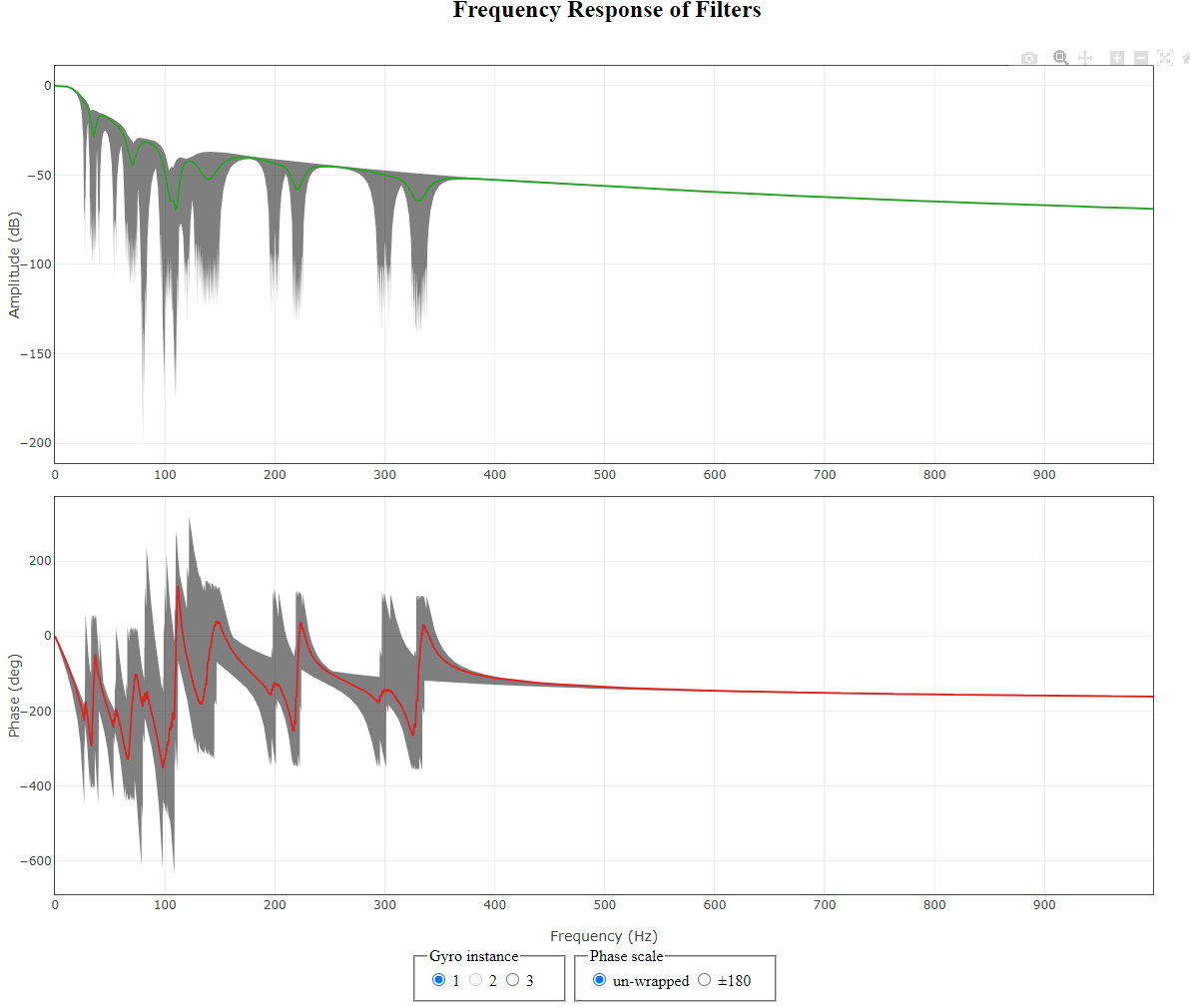
The bode plot shows the mean transfer function along with the range, this can be used to see the how much phase lag the filters generate.
I have done a demo with some example logs that covers how the tool works in more detail:

The code can be found on Github here:
Feedback and Pull requests welcome!