@iampete (see graphs in previous posts)
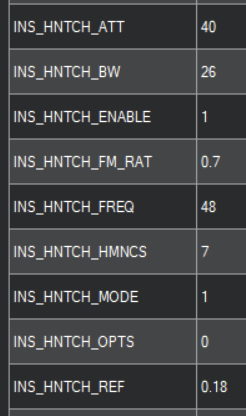
Well these HNOTCH settings derived from some time spent in the new Filter Review tool totally knocked out any noise - more so than we could have done using the normal methods and theory with only the MissionPlanner FFT graphs. To achieve the same effectiveness would have taken more test flights specifically to experiment with HNOTCH values, not knowing what the results would have been.
The revelation is the frequency is set lower than we would have previously expected due to the “shape” of the notch, and this can be clearly seen in the new Filter Review tool.
It looks like attitude control is nice and smooth with only minimal work required to complete the tune now,
You can safely set
ATC_THR_MIX_MAN,0.5
I would just run Autotune.
In that final log the Roll attitude control is actually worse than what it was in the previous two logs, so I’d put those PIDs back.