I am configuring my drone using the methodic configurator.
I have read about new FFT Filter setup and review web tool - Blog - ArduPilot Discourse
But I’m unsure what good parameters would have to look like.
When looking at the linear amplitude scale I observe a tiny bump here:
It’s too wide using Multi-Source. Why don’t you try reducing it and use Estimated Post-Filter to see how much it can be reduced and still get the job done?
This is not helpful for anyone, including you, wanting to further analyze the results of the configuration. Attitude and Rate are not being logged for one thing. @amilcarlucas, I suggest this bitmask be reset to default after the configurator does it’s thing.
Disable it. The log bitmask already has Fast Harmonic Notch Logging enabled from The Configurator.
thank you, indeed everything works perfectly with firefox.
Are there any resources to learn about good notch filter settings and the effects of all the parameters, so that I can read up on that and learn about it or is this just knowledge you get from experience?
I would first want to learn about it so I understand what I’m doing.
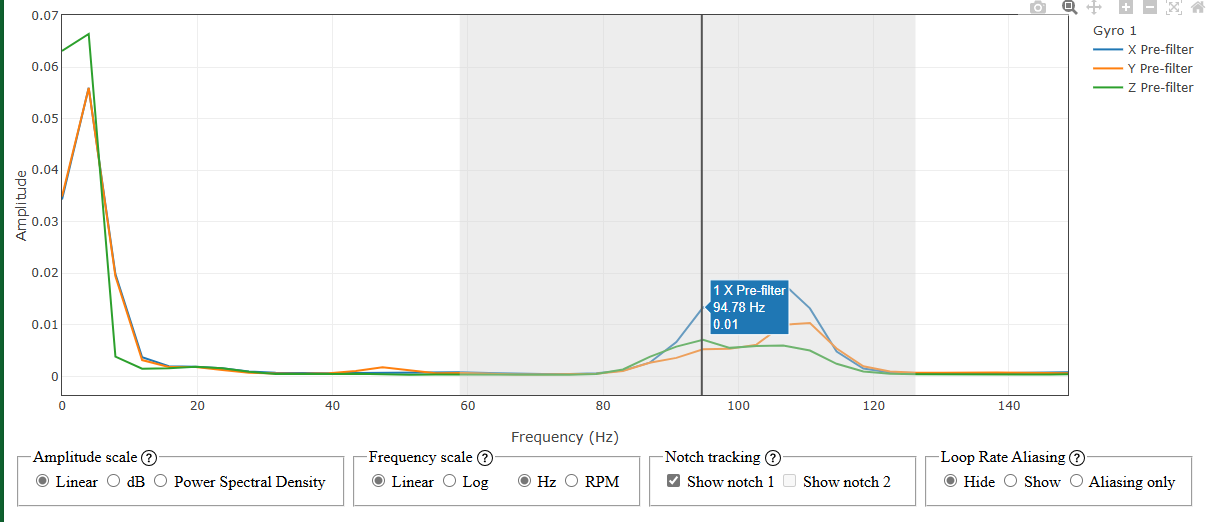
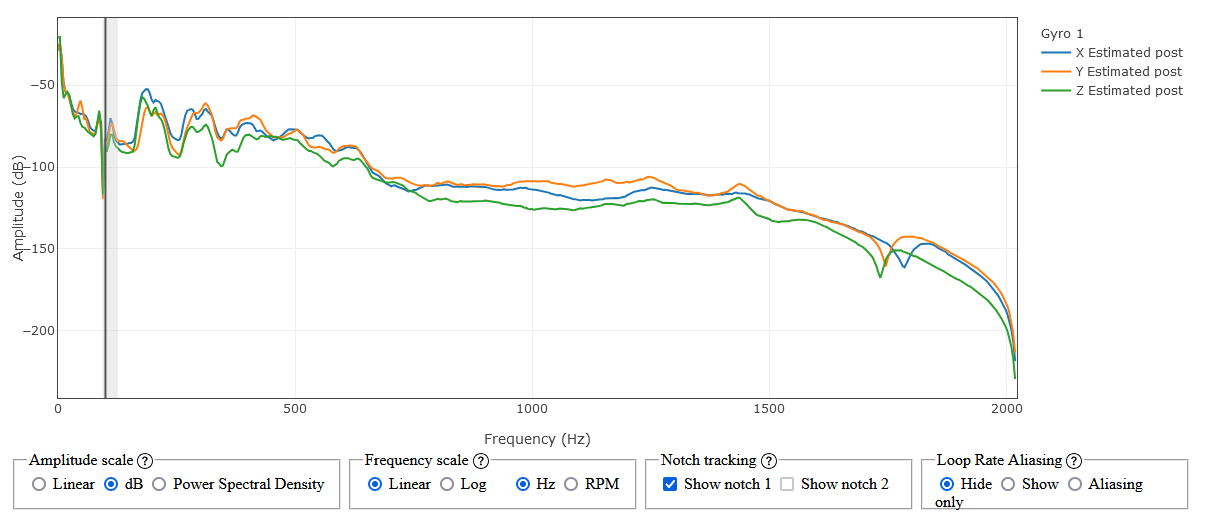
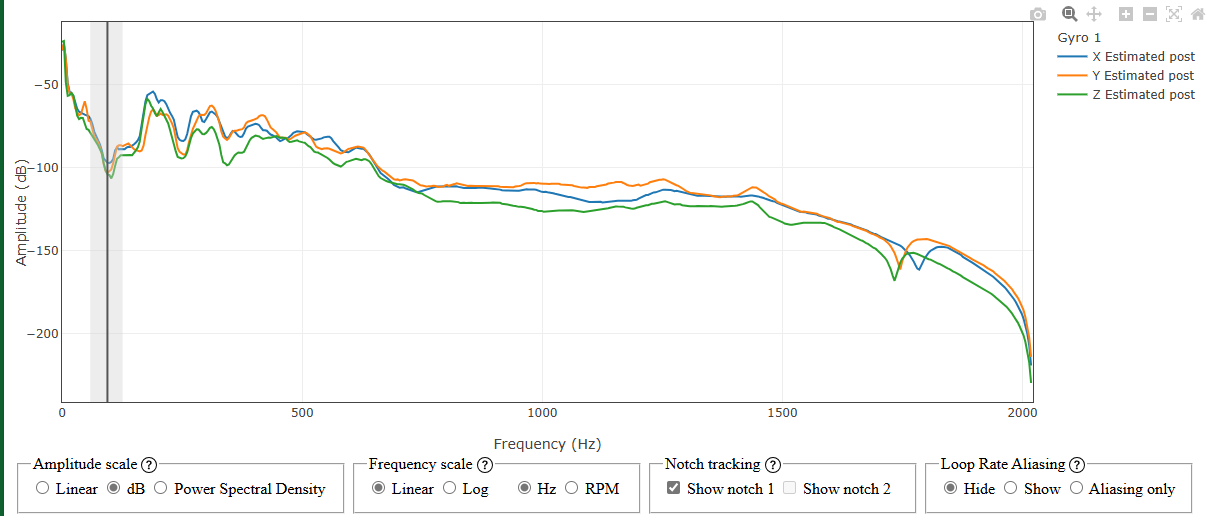
I configured INS_HNTCH_FREQ to 58.8 Hz using the configurator. However, when I use the filter review tool, the first notch shows up around 95 Hz, which is confusing. Here’s the plot I see:
Why is the actual notch frequency not matching the configured INS_HNTCH_FREQ?
Should I leave INS_HNTCH_FREQ at 58.8 Hz, or should I switch to 94 Hz?
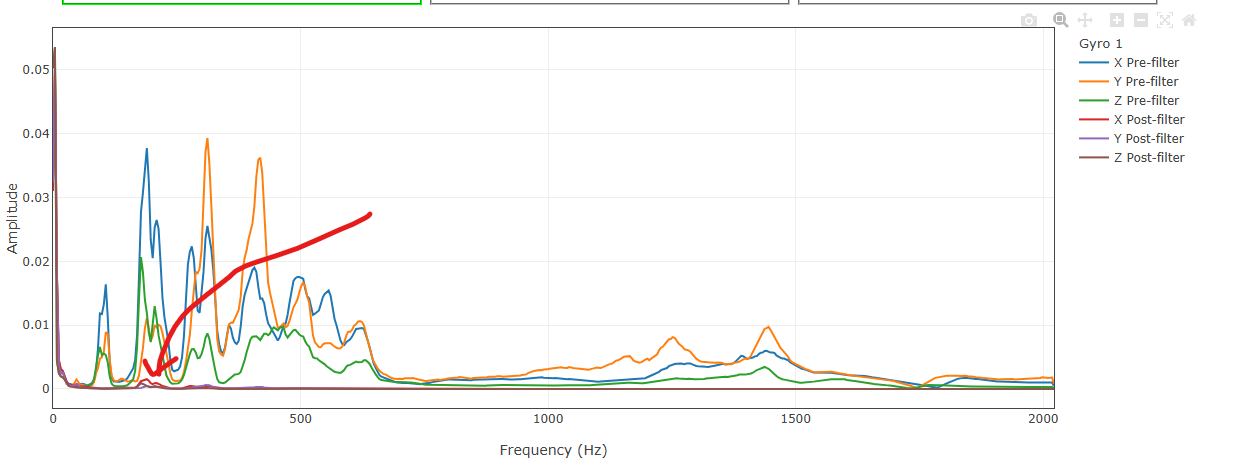
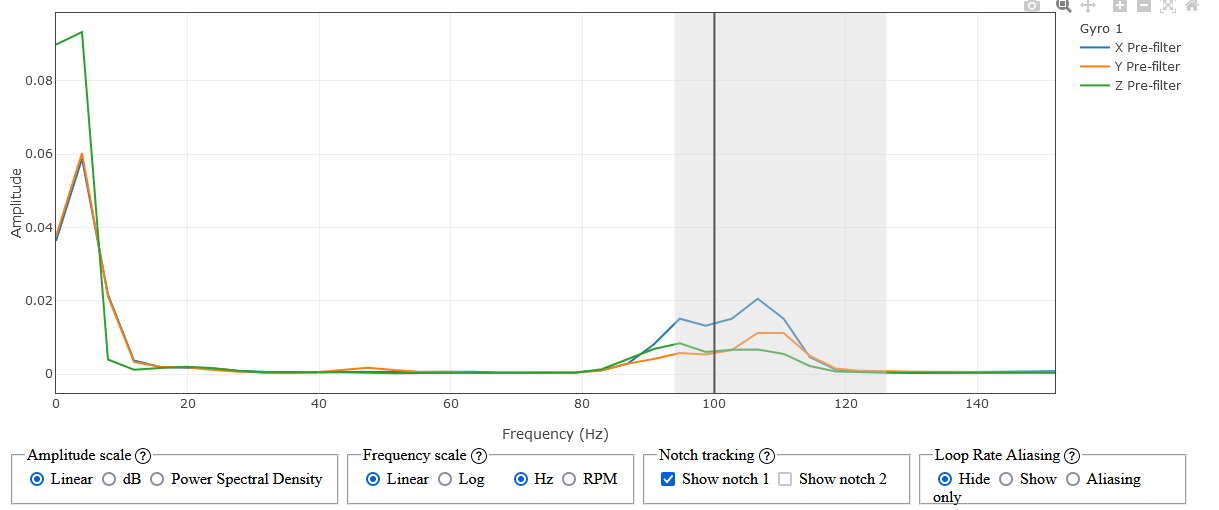
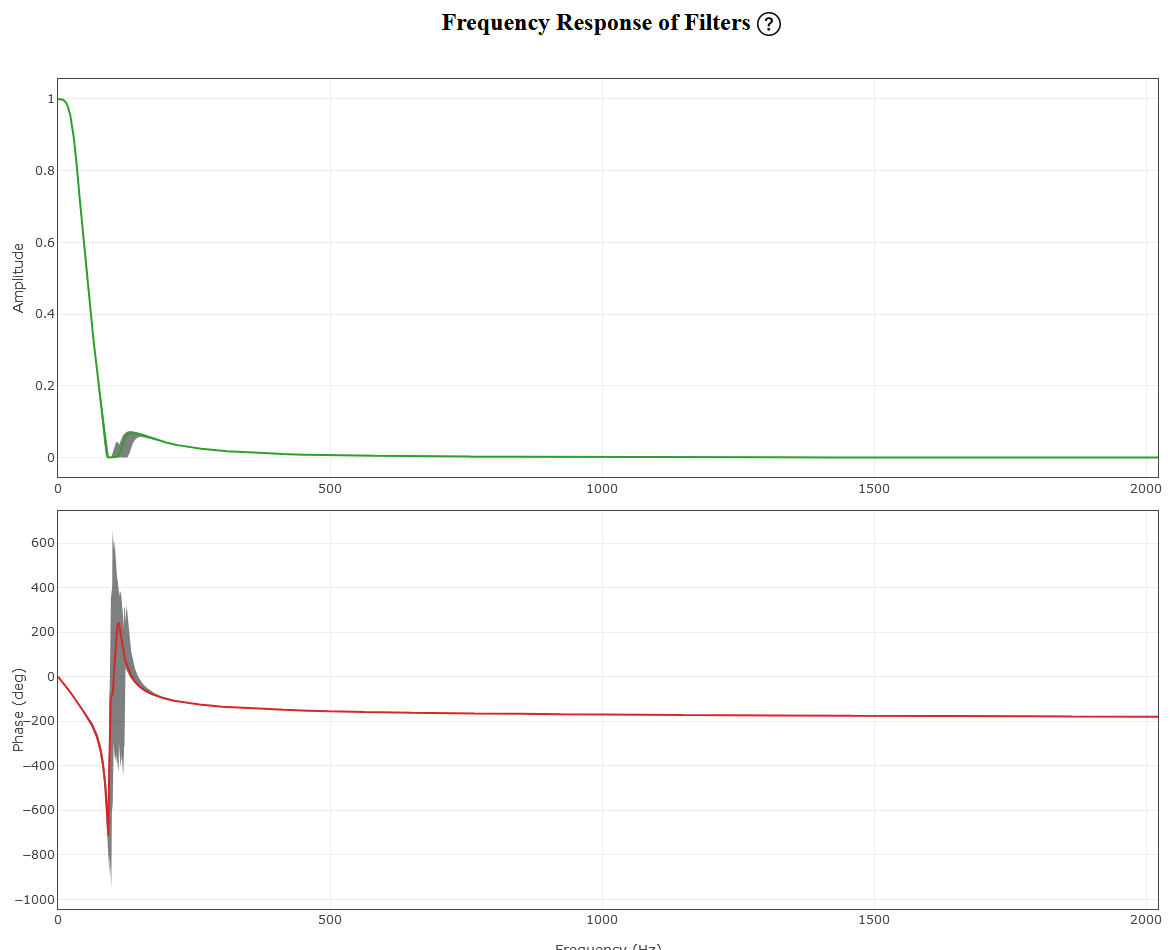
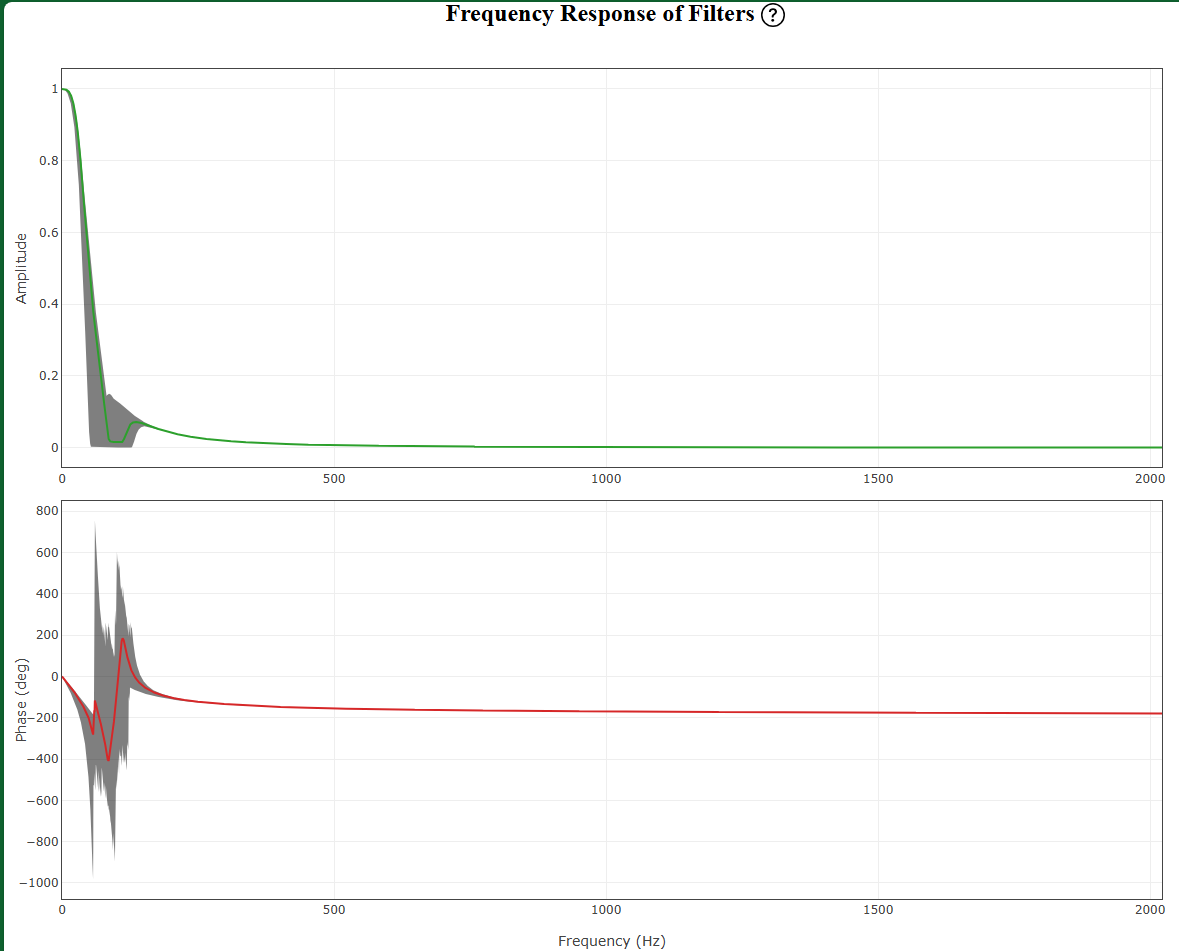
In the post-filter estimates, the difference between these two settings seems negligible. However, the frequency response filters tell a different story: 94 Hz setting:
From these plots, the configuration at 94 Hz looks preferable because the frequency response curves are smoother. But I’m not 100% certain about this interpretation.
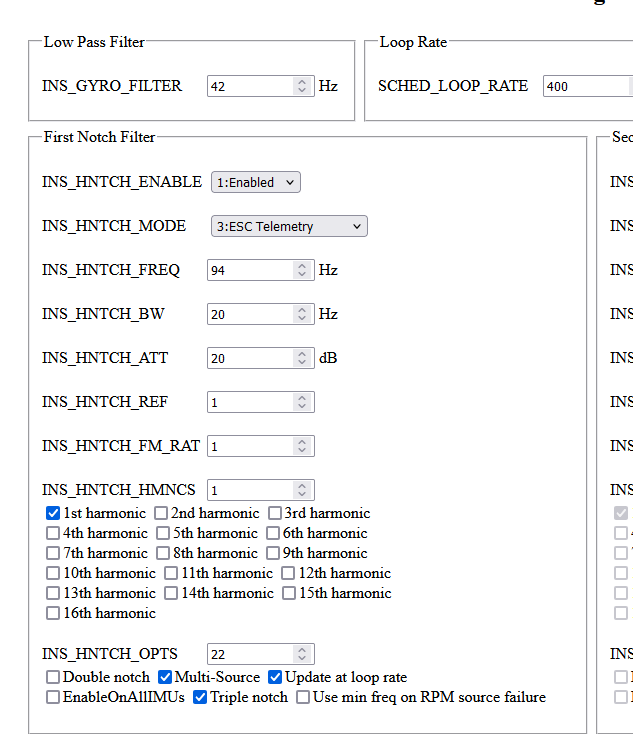
Here are my current settings based on feedback and research:
Can someone explain why the notch frequency doesn’t align exactly with INS_HNTCH_FREQ?
Is it better to set INS_HNTCH_FREQ to 94 Hz or keep the original 58.8 Hz?
Are there any other important considerations I might be missing here? Are my final parameters good? I want to get a very good tune for autonomous missions.
With ESC Telemetry mode the set INS_HNTCH_FREQ is the lower limit. The actual frequnecy comes from the RPM from the ESCs. If that does not match your peaks it suggests your pole count for the motors might be incorrect so the eRPM to true RPM calculation is not correct.
Hi @amilcarlucas - I still see it as 176126 for V4.6.0-beta1 but I would say 2273278 which is that default + Fast Harmonic logging.
What has happened a couple of times is the LOG_BITMASK has everything enabled and then RAW Logging was enabled too and the browsers choke on with the Web Tools. But @iampete did offer a solution to use Firefox. I use Brave typically.