Yes! - to me that looks great now. Attitude control is tight but could maybe do with an autotune or a couple of tiny tweaks, but nobody is going to notice.
Thanks for persisting and running more test flights.
Let us know your thoughts on the tuning as it is now, and feel free to ask if there’s more you want to do with it. The yaw is a bit fuzzy and could do with a yaw Autotune.
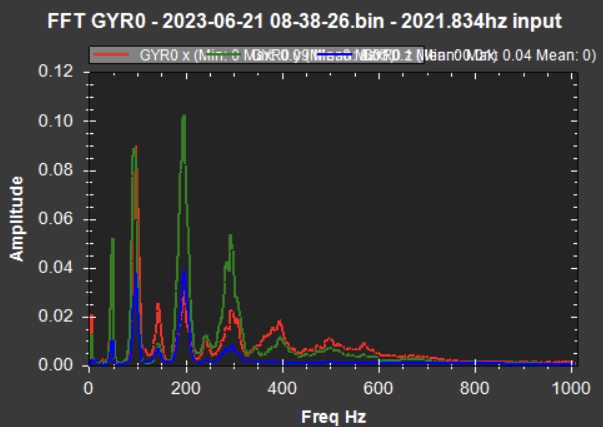
The noise and harmonics shows a BIG change:
Pre-filter
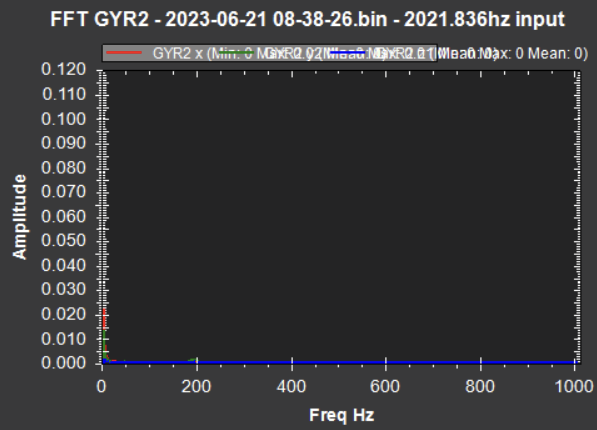
Post-filter
There’s nothing here of significance