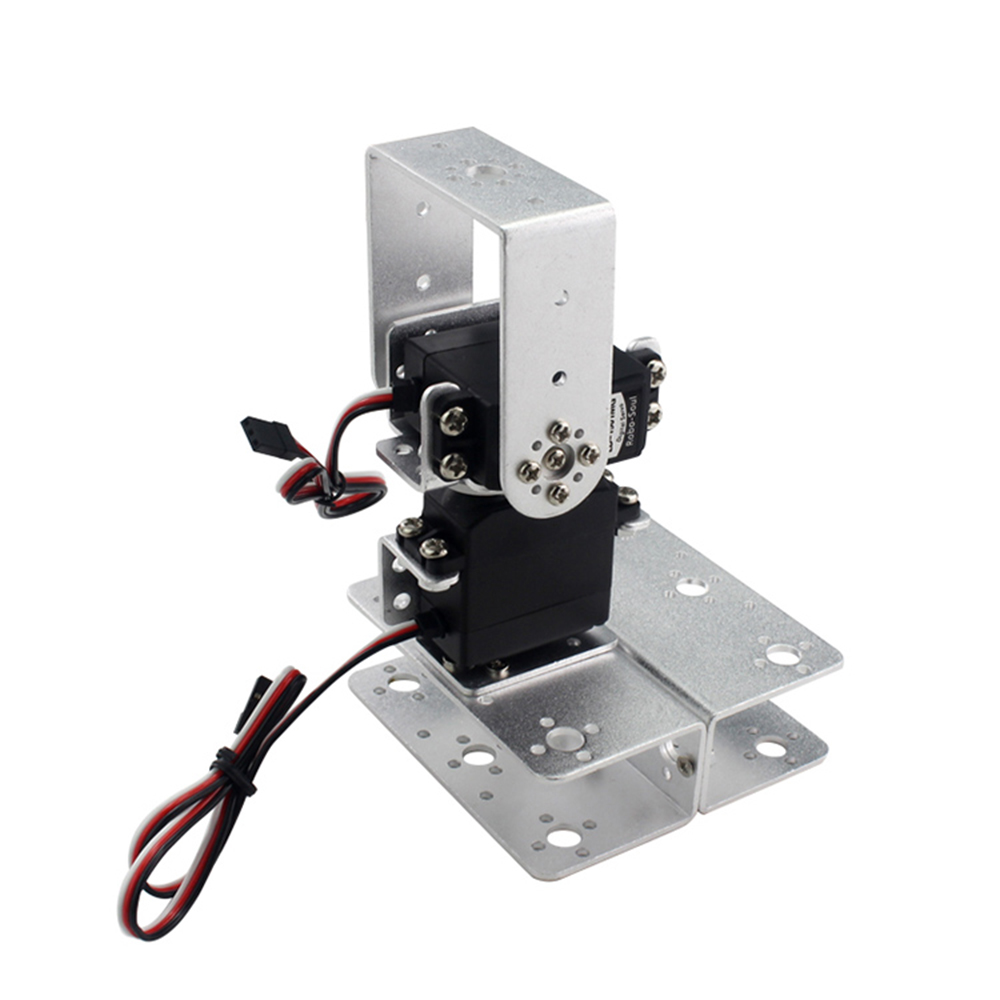
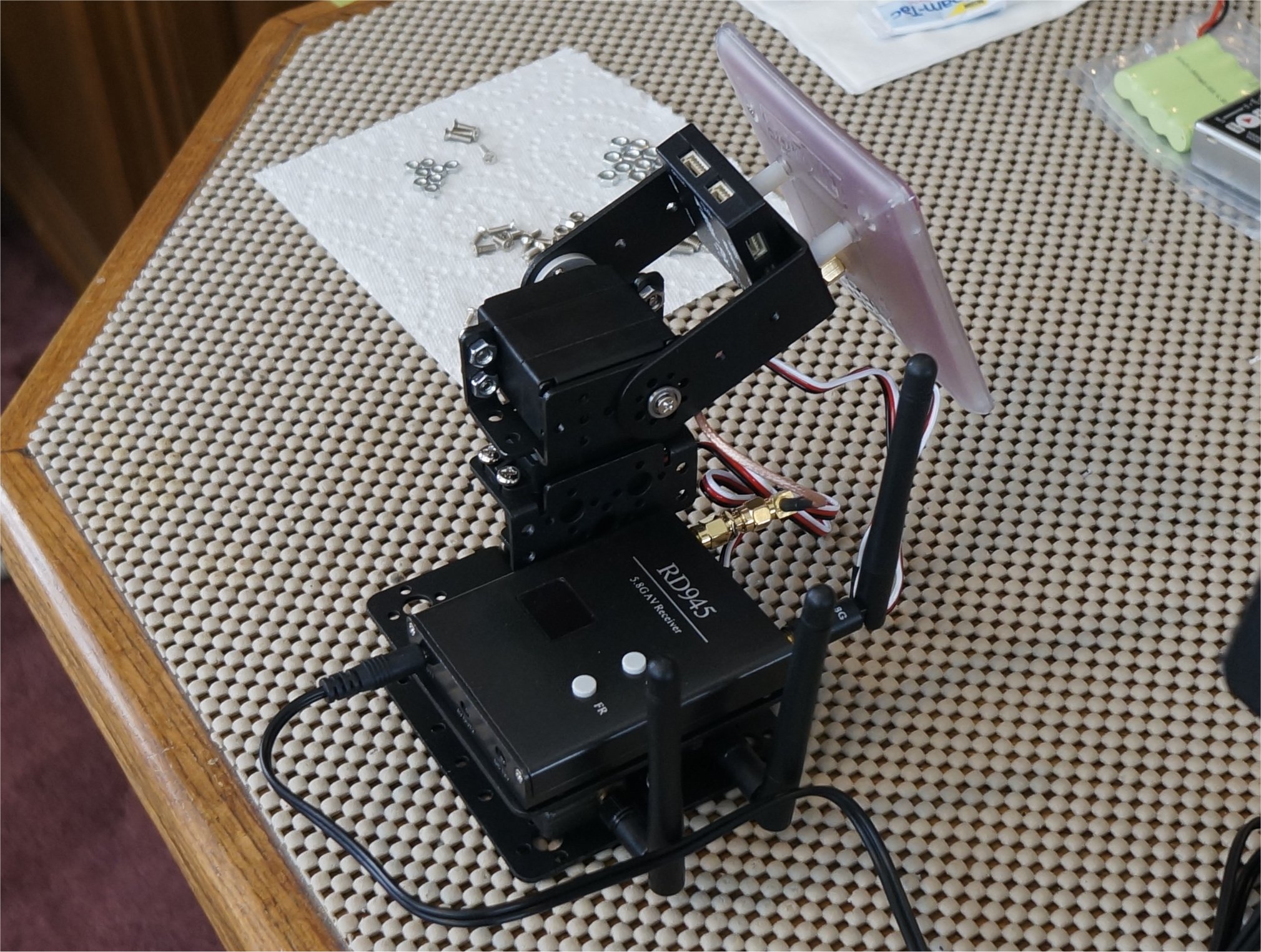
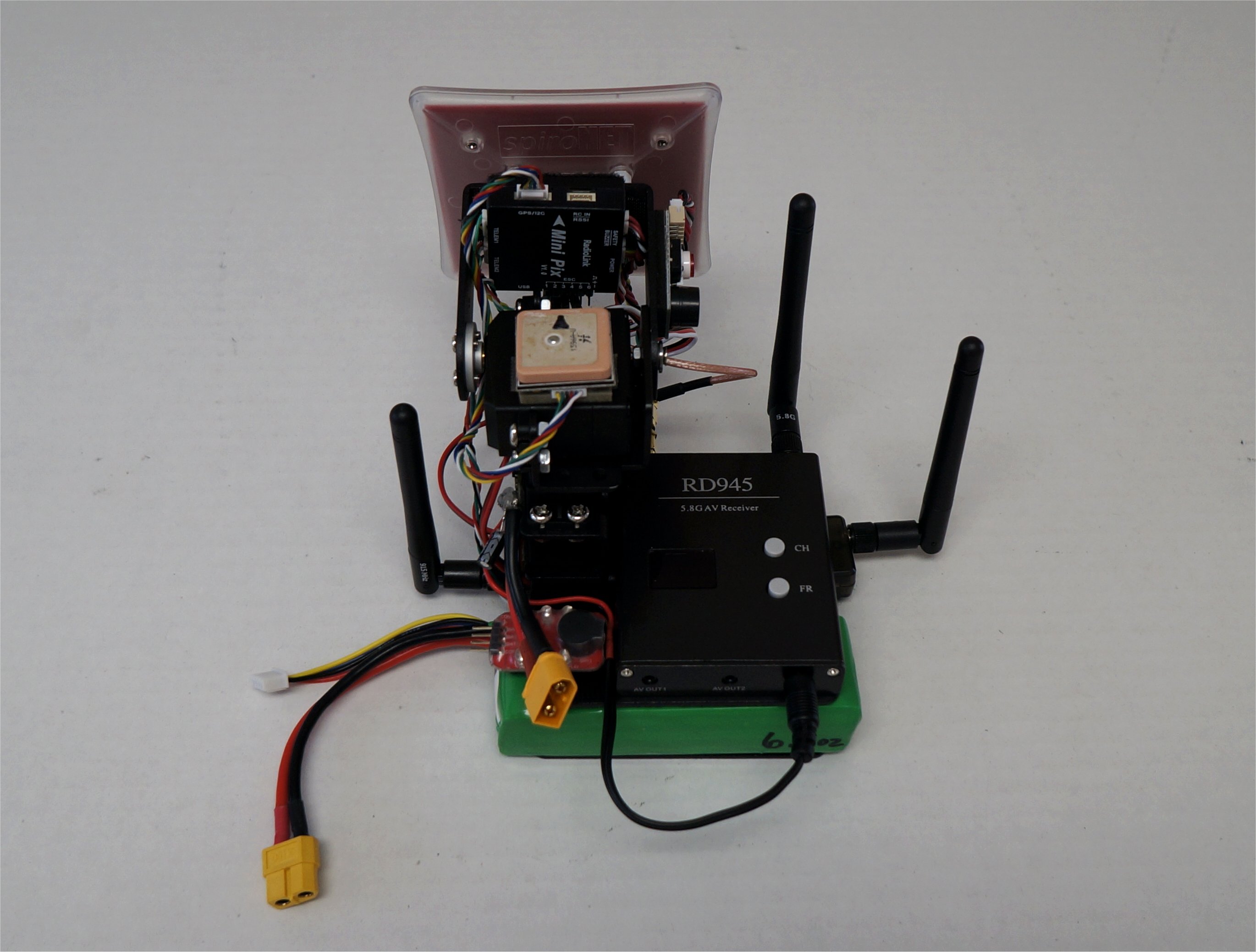
Since I had previously set up my mini PIX for the Antenna Tracker, it was mostly a plug-n-play assembly to finish things off. I found an older Multistar 3s 3AH pack that fit perfectly in between the base bracket plates and the 10C discharge rate fit the AAT’s current requirements. I use a $3 Lipo Battery Low Voltage Alarm Indicator from BG to keep the battery safe.
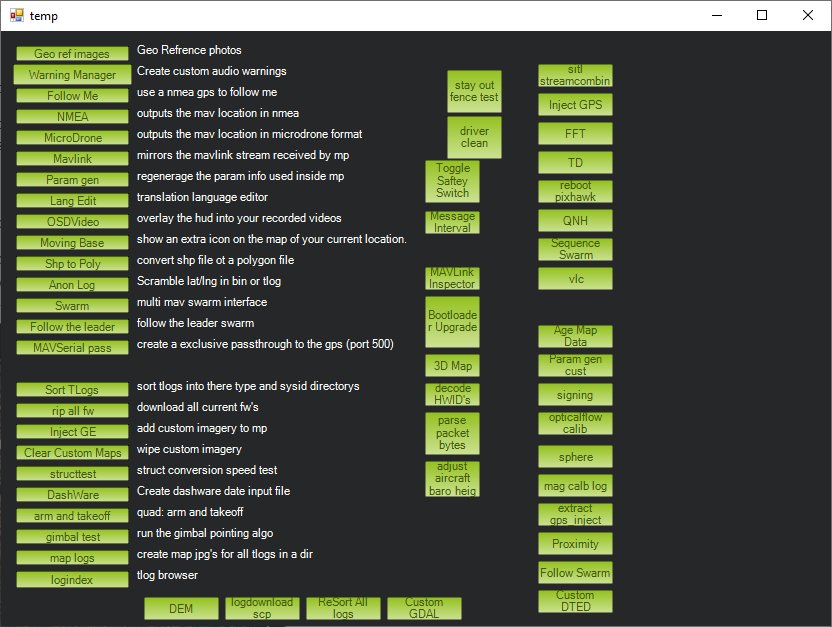
I did run into one big issue, which was changing over to the internal compass on the mini PIX. The Antenna Tracker firmware would not allow me to do this using Mission Planner v1.3.70, nor would it even calibrate either compass. My solution was to load the latest Copter 4.0.1 code into the mini PIX which allowed me to properly calibrate both compasses using the Onboard Mag Calibration. This hint came from the mini PIX Manual, page 17. I then saved this parameter file. The AAT firmware was loaded back on, along with my originally saved AAT param file (see below), and I manually entered the calibration values for just the internal compass. Some of the parameters below are read-only just for show. The main values entered pertain to compass #2.
See Post #7 as this process is not needed to calibrate the compass!
COMPASS_AUTODEC,1
COMPASS_CAL_FIT,16
COMPASS_DEC,-0.2421951
COMPASS_DEV_ID,855305 (external compass)
COMPASS_DEV_ID2,855297 (internal compass)
COMPASS_DEV_ID3,0
COMPASS_DIA2_X,0.9838372
COMPASS_DIA2_Y,1.003144
COMPASS_DIA2_Z,1.005739
COMPASS_ODI2_X,-0.005123704
COMPASS_ODI2_Y,0.02832997
COMPASS_ODI2_Z,0.009586642
COMPASS_OFS2_X,79.63103
COMPASS_OFS2_Y,110.178
COMPASS_OFS2_Z,50.07391
COMPASS_USE,0
COMPASS_USE2,1
COMPASS_USE3,0
miniAAT4.param (8.7 KB)
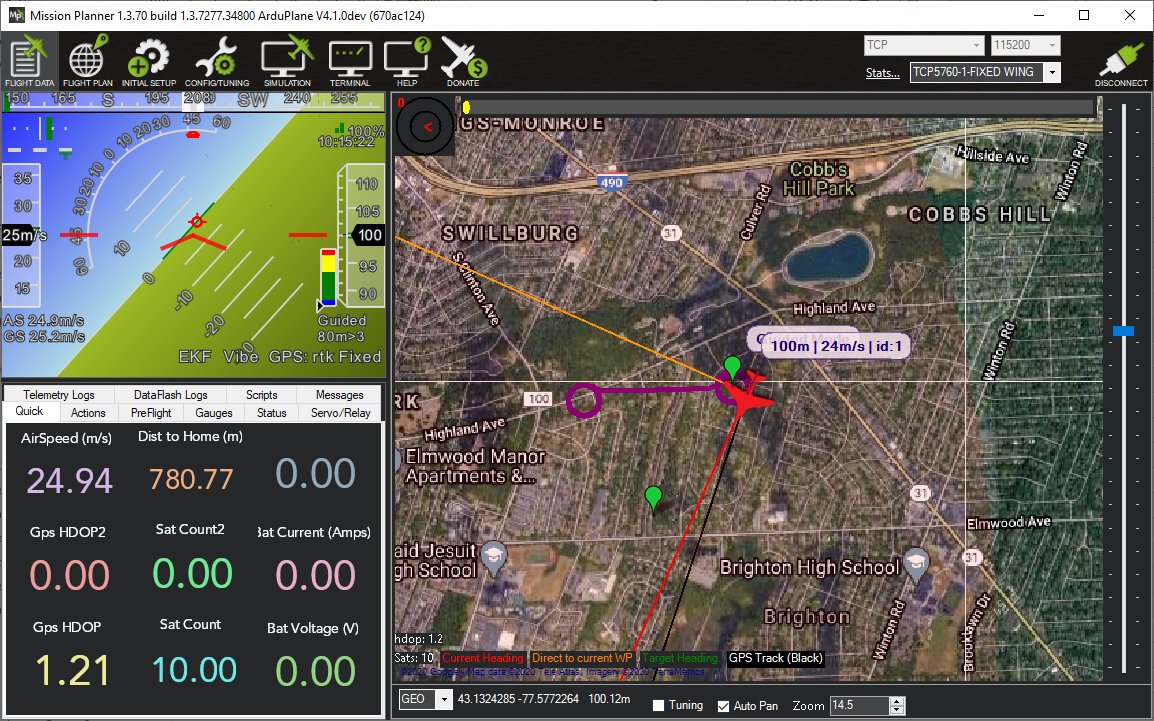
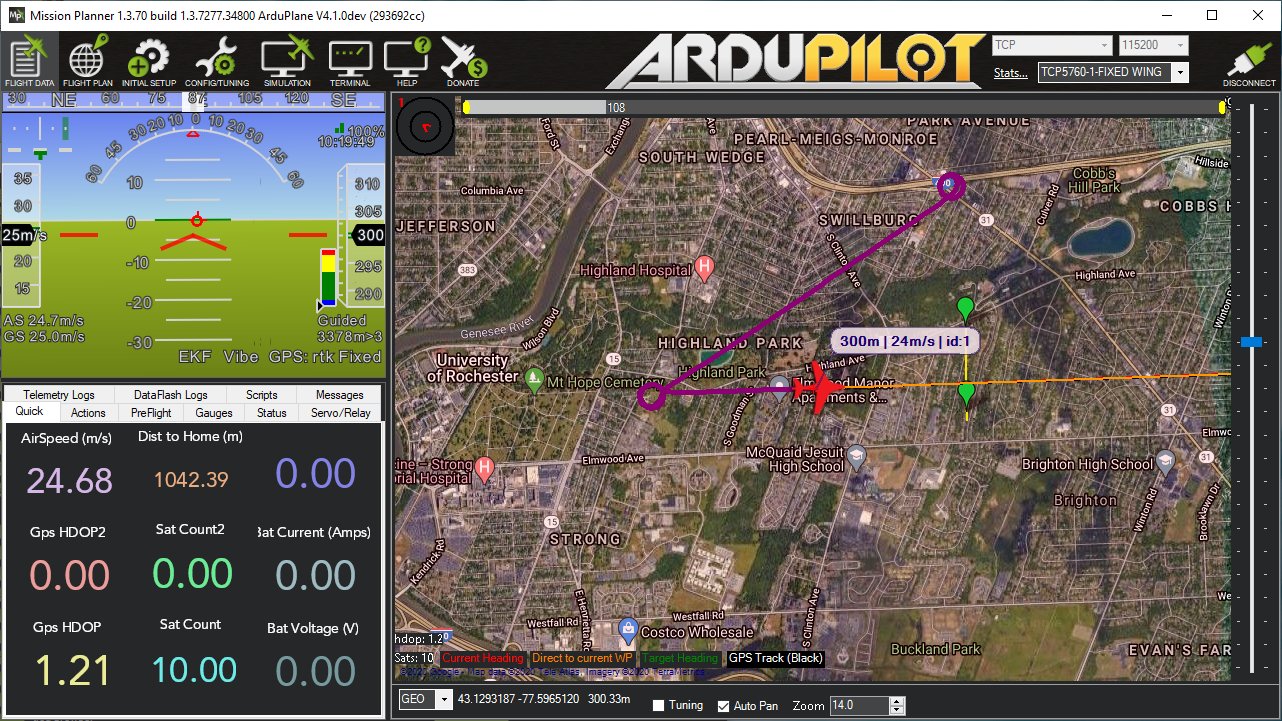
I got some better separation between the AAT and Plane by putting the plane in the garage. It’s cold and snowy here so no outside testing yet. Anyway, it was far enough to get the tracker working and the yaw worked quite well. One limitation I found with the supplied servos is that they appear to be only 90 degrees servos. This is fine for pitch but may be too limiting for others on yaw.