There are several variants of the Antenna Tracker so I decided to document my AT build here which follows the ArduPilot Antenna Tracker design. This version was originally designed and used by Tridge and then updated, improved, and, released by Randy. The original AT thread is on DIY Drones here.
I am currently using the v0.8.0 of the APM Antenna Tracker which included a new filter to smooth input to the controllers. It worked great for both APM Copter v3.3.3 and APM Plane v3.2.3. My ALT_SOURCE parameter was set to use GPS.
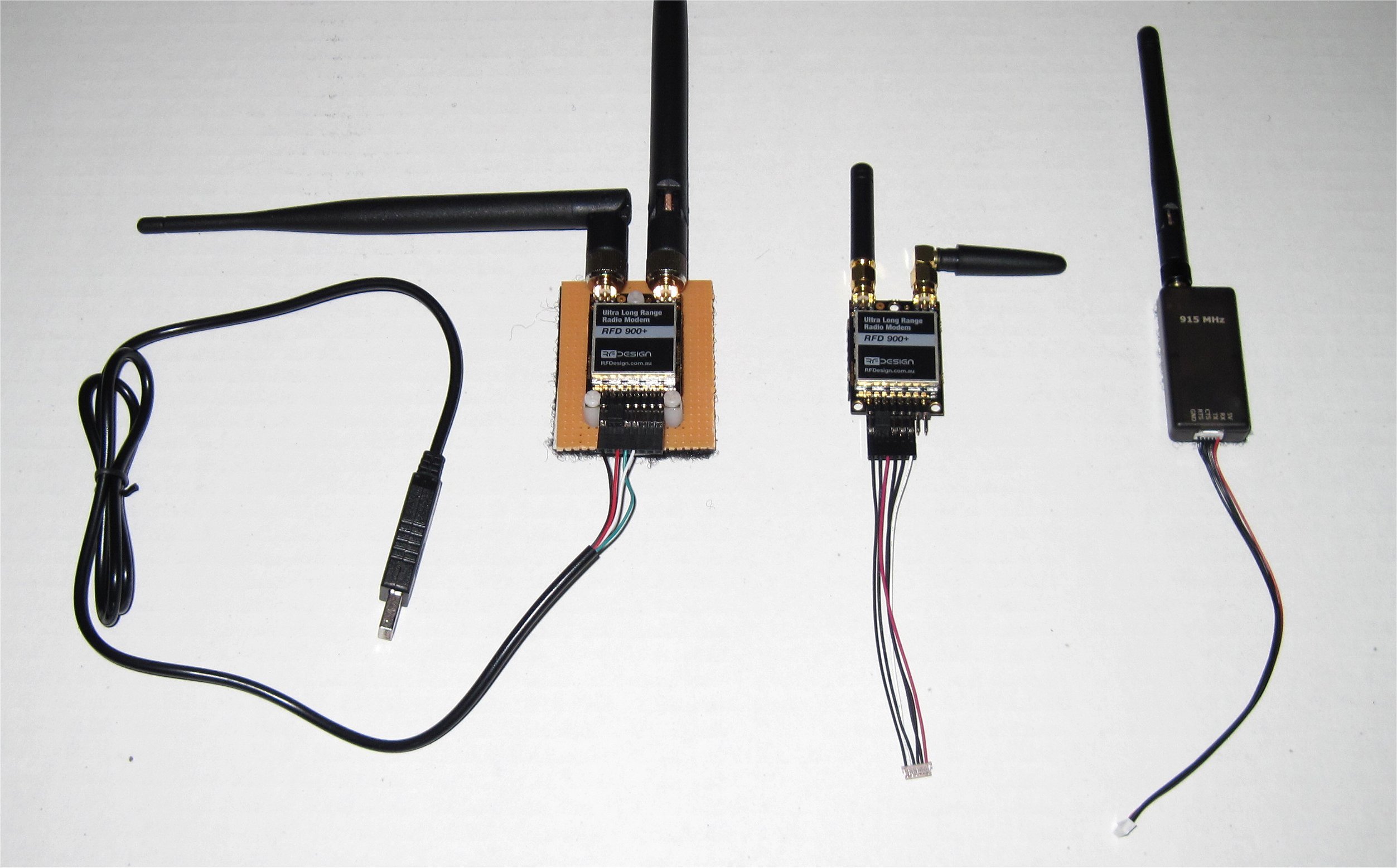
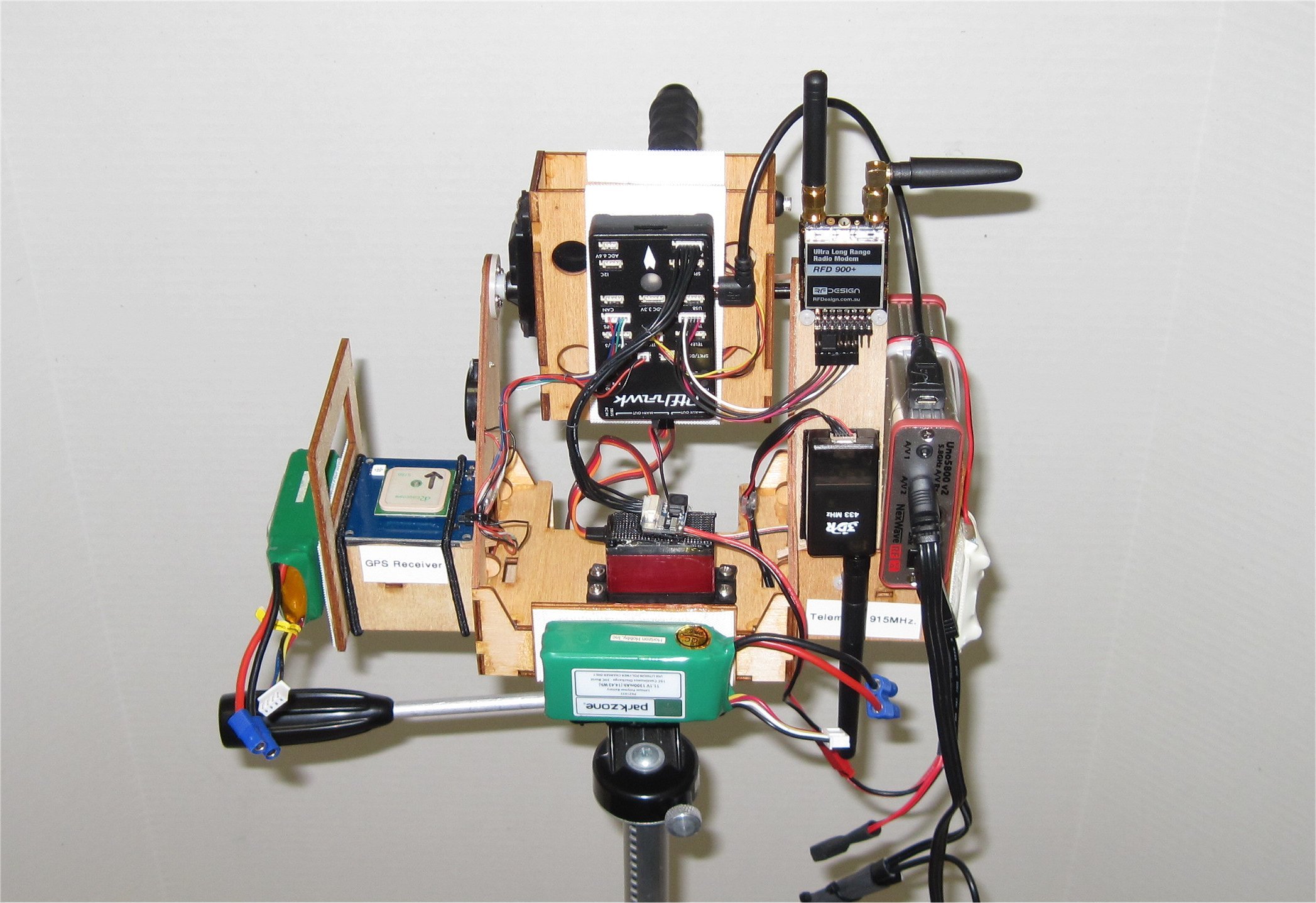
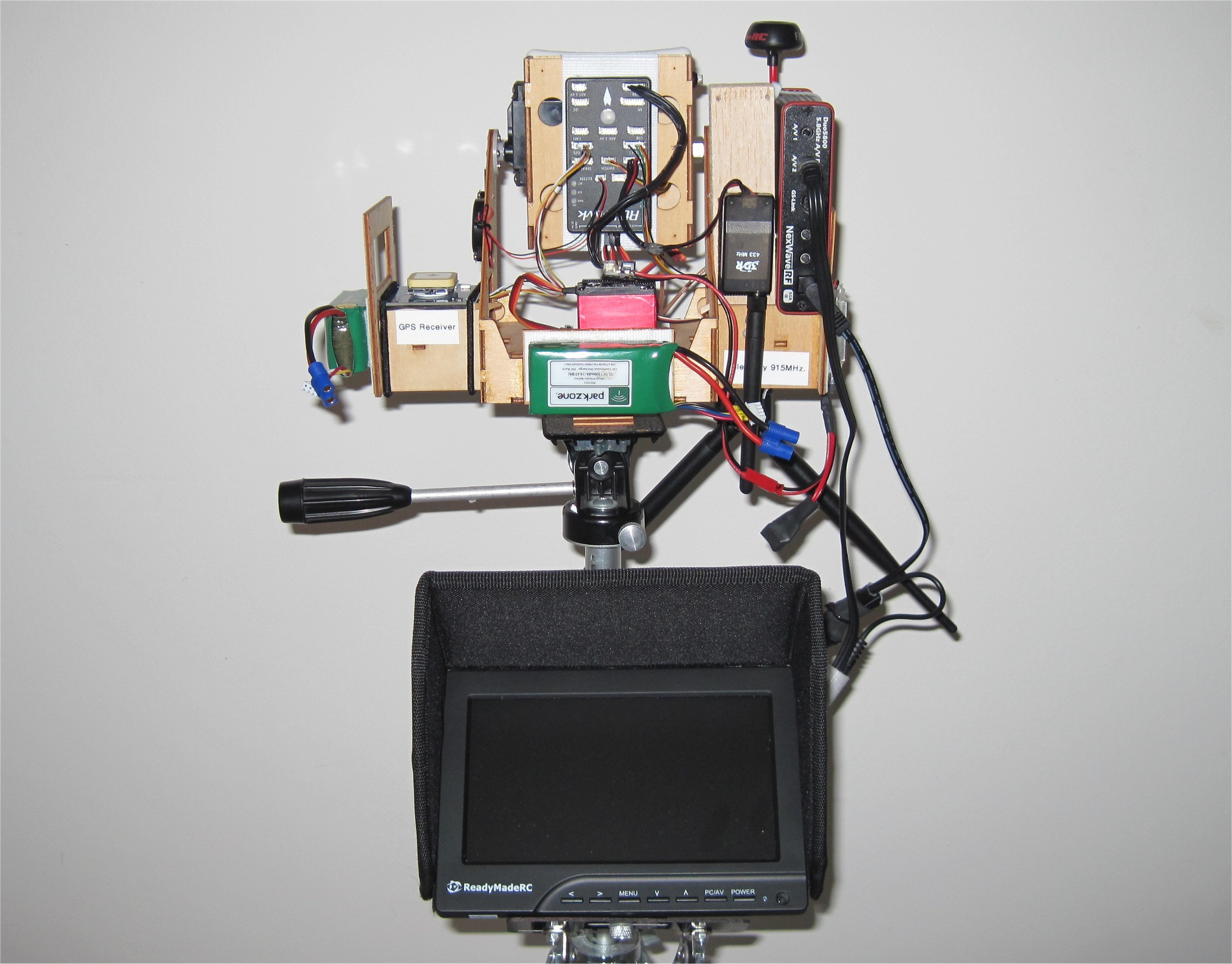
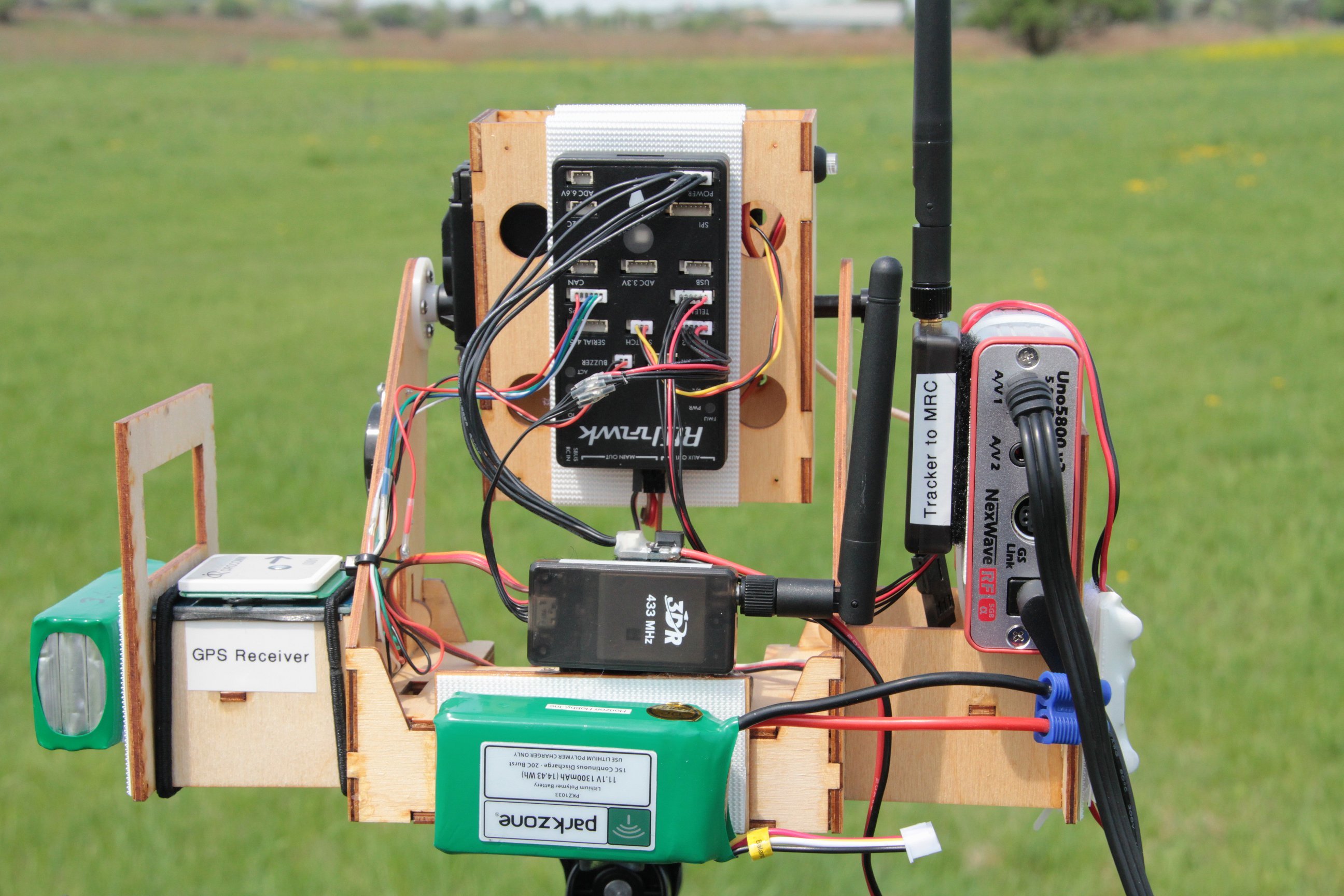
My tracker uses an EZTracker with extra side car from ReadyMadeRC, a long range RDF900 telemetry unit and an ImmersionRC DUO 5.8GHz receiver with a directional and omni antenna. The extra side car acts as a counter-balance and a spare battery holder. It also holds the GPS module.
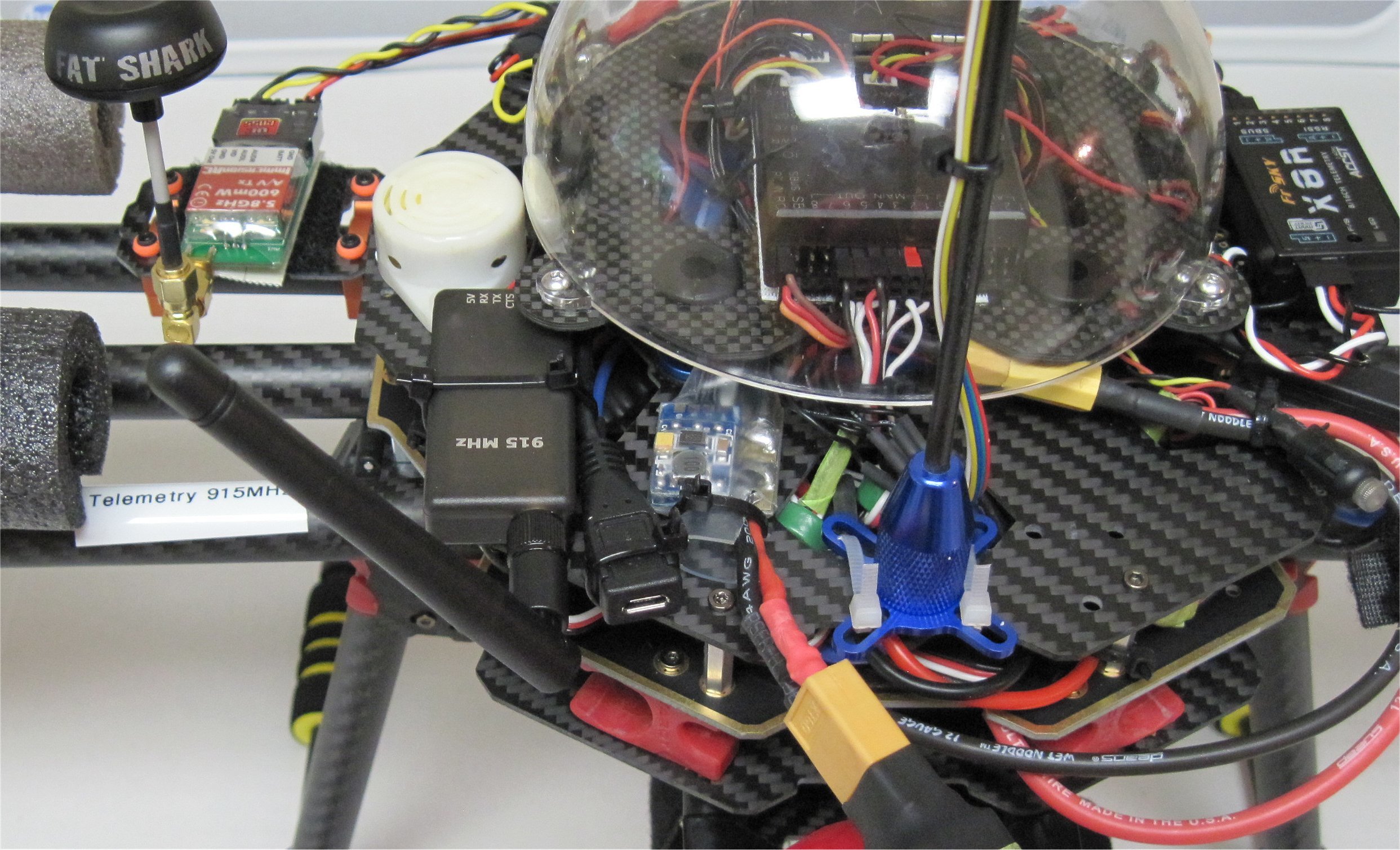
I use the AT for my 5.8GHz video downlink. Since the 900MHz telemetry link uses an RDF900 at the ground end, the air units in the vehicles can be the normal less expensive 3DR design without any range issues.
My param file is posted below for those that are interested. I’ll detail my build in more posts below.
Below is my initial test of the APM Antenna Tracker with v.0.7.7 firmware. The new ALT_SOURCE parameter was set to 1 for GPS instead of BARO to determine the Altitude setting of the pitch servo. The Antenna Tracker worked perfectly!
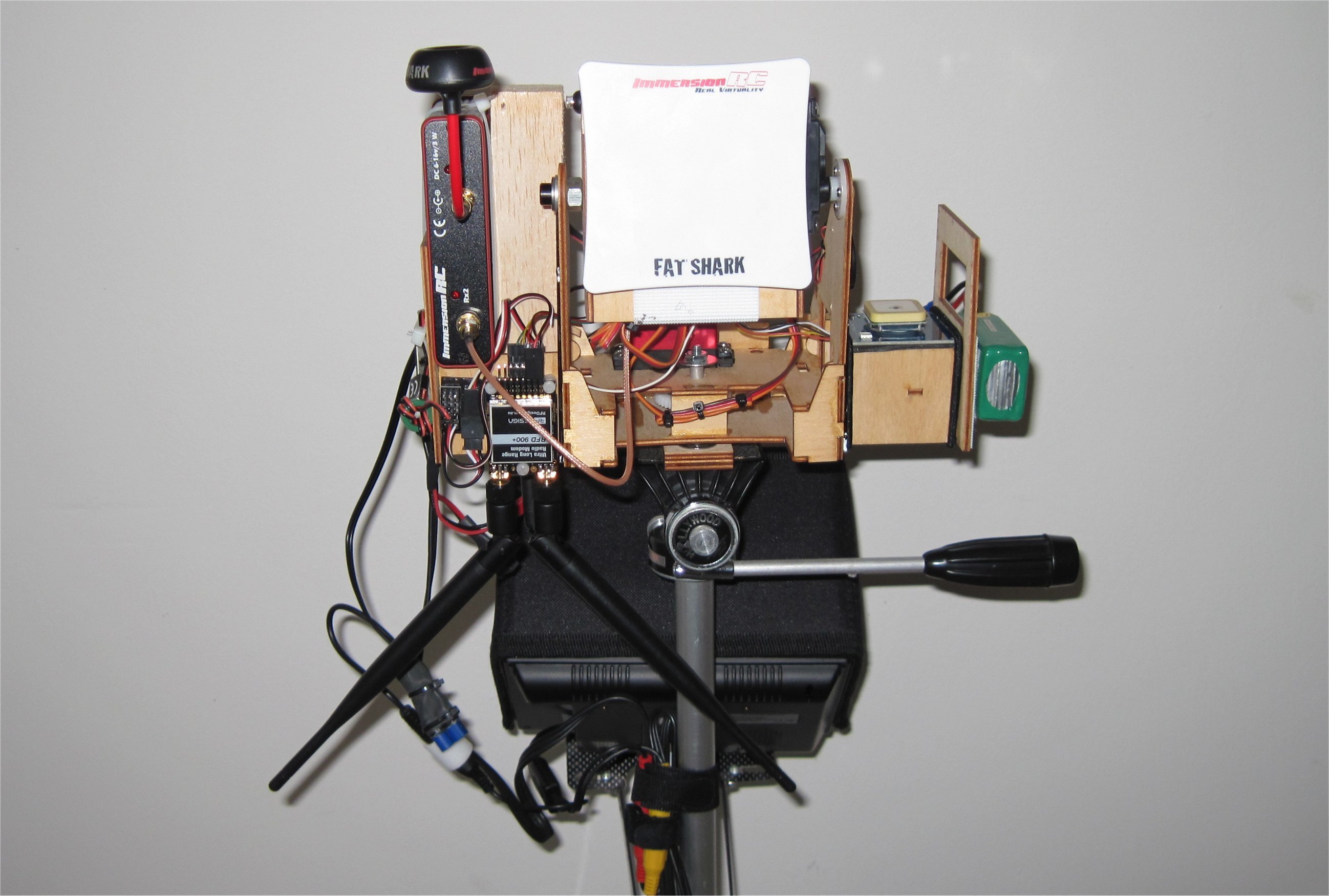
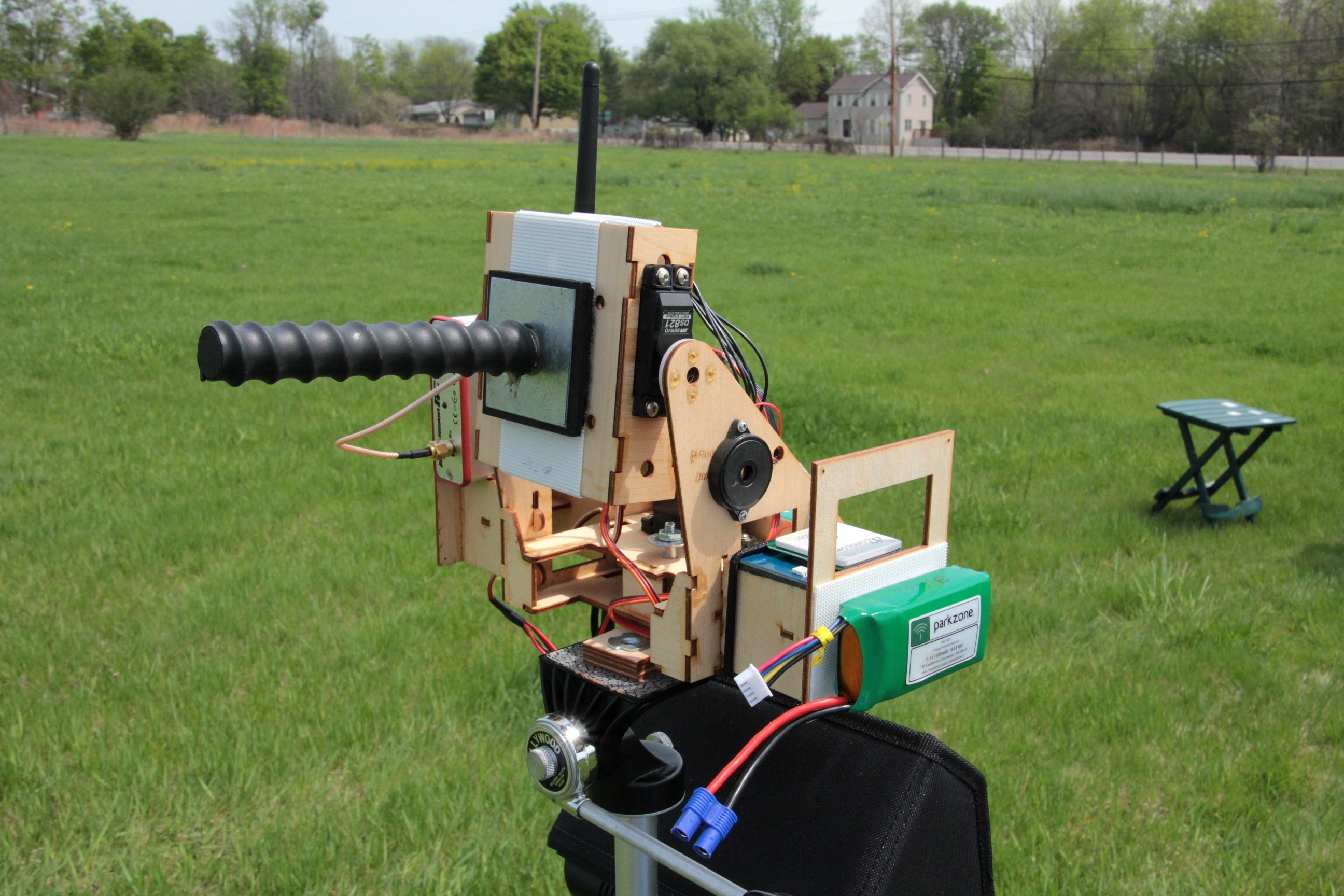
My AT has been upgraded several times. I replaced the pan servo with a much stronger JR digital metal gear servo. I also replaced the original 10-turn 5.8GHz helical antenna with an Immersion RC flat antenna which performs very well and eliminated the torque from the extended weight of the 10-turn helical.
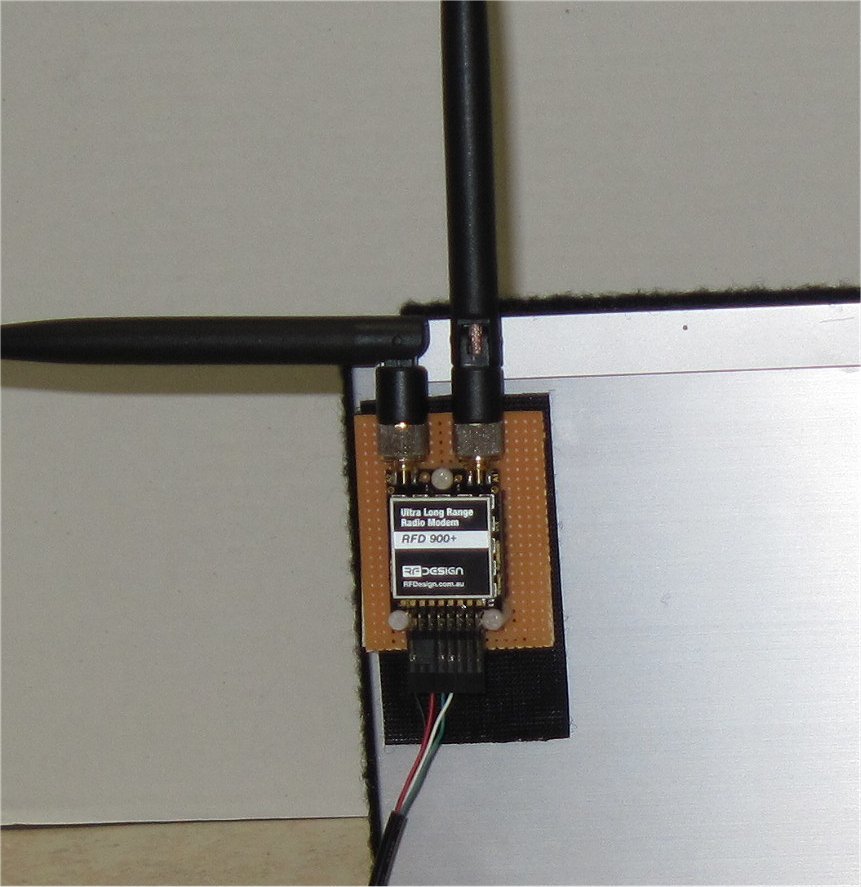
The smaller air antennas on the RDF900 unit were radiating into the servos. I discovered by using the longer ground antennas, the radiation stopped.
Since the AT doesn’t have battery monitor capability yet, I use an inexpensive monitor from Hobby King. The extra side car acts as a counter-balance and a spare battery holder. It also holds the GPS module.
Thanks. The frame is a kit from ReadyMadeRC [URL=“https://www.readymaderc.com/store/index.php?main_page=product_info&cPath=11_408&products_id=96”]here[/URL]. I originally used it with my ImmersionRC tracker setup and then upgraded to the APM Tracker setup so I no longer needed to calibrate it every time I used it. I added a second side car box to help balance it laterally and act as a second battery holder. You can buy it with or without the servos. Apparently GoodLuckBuy also has a unit now but I haven’t looked at it yet.
hi, i 've been on ardupilotat the beginning then i left for few years now i would like to use my old apm2 to make an antenna tracker. i flashed the tracker v1 and configure few stuff but i don’t seem to be able to change the altitude source, is that normal?
is there away to testthe trackerwithout a vehicle (don’t have an other apm2 or pixhawk with data link for now)…
Hi, I do not know if 1.0 really works on APM2.6. Last time I checked, you could select 1.0, but MissionPlanner would flash 0.8 on the APM2.6.
To test your tracker, plug a telemetry radio into your PC, start MissionPlanner SITL.
If you press ctrl-f, you can select to output the SITL mavlink stream through the telemetry radios serial port. The tracker should then follow the simulated vehicle.
I also have the same problem of not being able to select the pitch control field. I flashed the AT firmware with the earliest version of 0.8. to APM2.6 . This does not help either.
Other than this, do you get the tracker working ? If yes, I will send you the details of my setup. Can you comment on what I have missed that it does not work ?
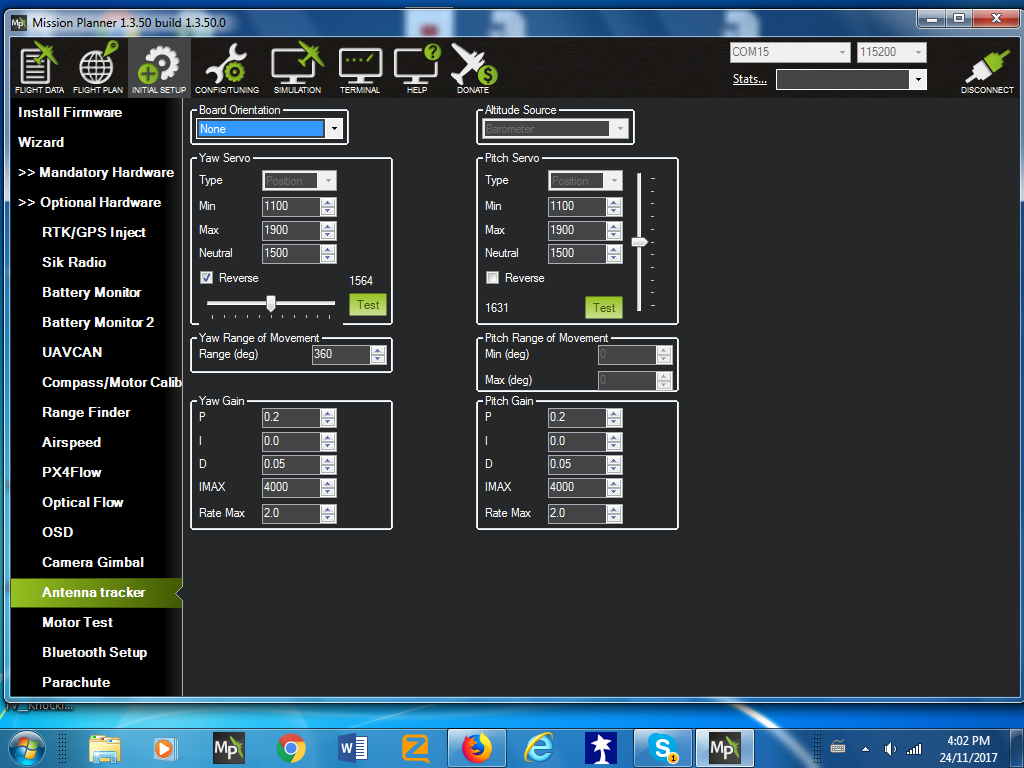
I flashed the APM2.6 with Antenna Tracker V 0.7.2 . However, the “Type” fields for yaw and pitch servos are greyed out, same as the “pitch range of movement” field. Any idea why ? See attached.
I assume altitude source is also not an option even for V0.7.2
Am waiting for a Pixhawk which is in mail to me. Will try using it as a tracker controller. But I saw people were successful using APM as a tracker controller.
You can always go to the full parameter list and setup everything there. This is what I do most if the time, because then I can be certain all values are where and what they should be.
I can not remember when position servos were added, perhaps 0.72 did not support them.
hi, i use your parameters, can it be for servo pan rotation without using gear? so i immediately use 180 degree servo to rotate pan. if not, which part should I change in the parameter?
Thank you in advance
The basic building blocks for the APM Antenna Tracker (AAT) can be found in the WiKi. I am not familiar with the H16 Smart Remote Control System but you can use it independently from the AAT just by using a different serial port on the Pixhawk flight controller in the aircraft. Essentially, your vehicle has a separate RF link to the AAT. If the 3DR-type telemetry unit doesn’t provide sufficient range, you can swap either or both ends with an RFD900 Radio Modem.
If your intent was to rebroadcast the APM MavLink telemetry to the AAT via the H16 Smart Remote Control System, I do not know if it is capable of doing this.