Hi Frankie,
You are definitely having some odd problems that I have not seen before.
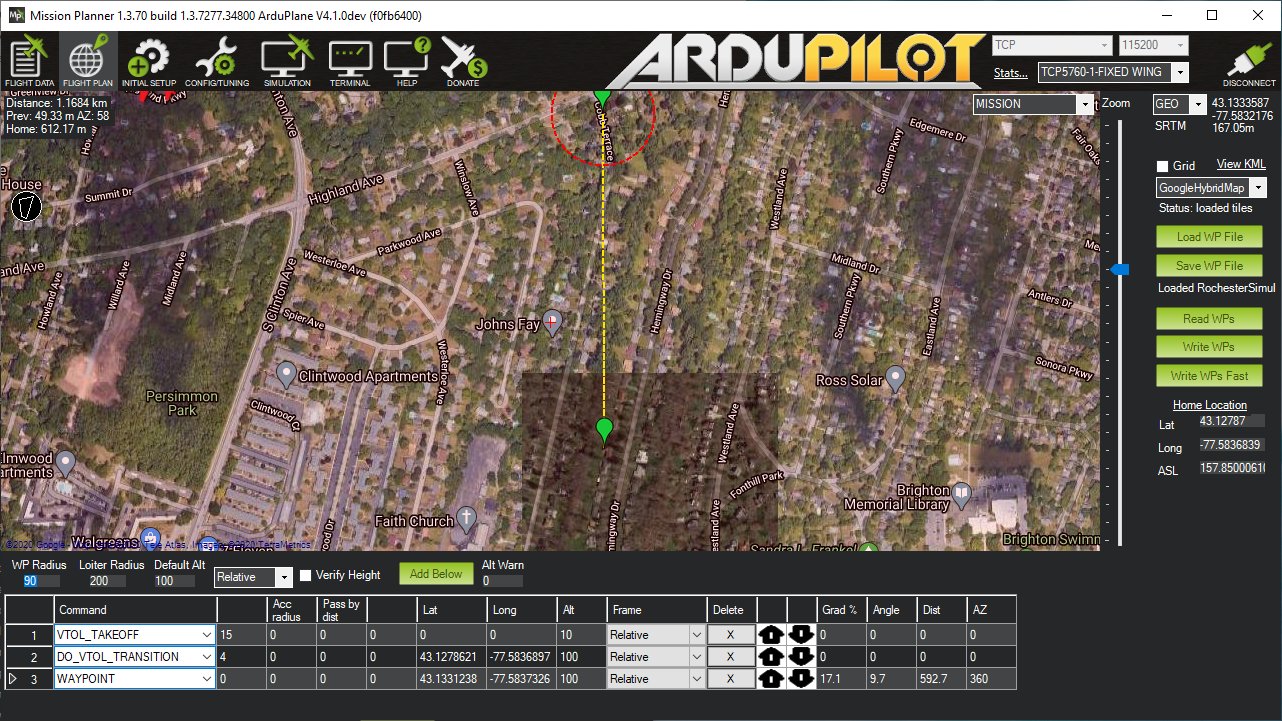
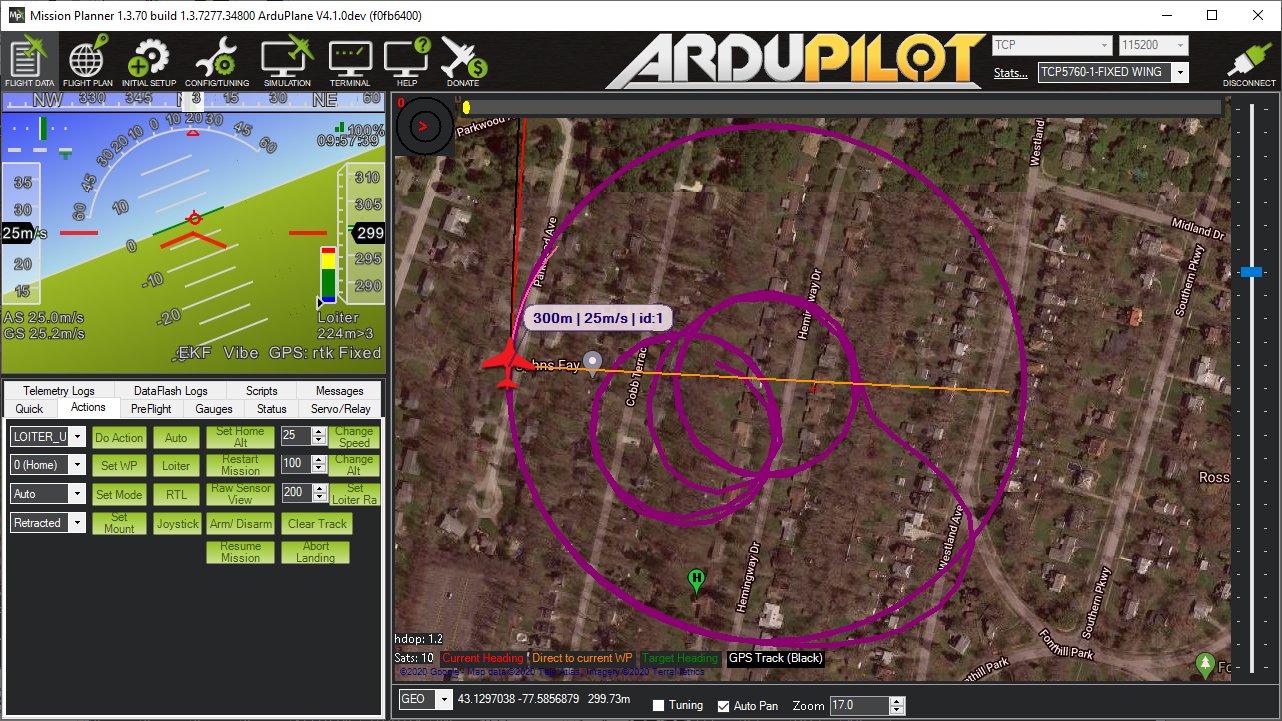
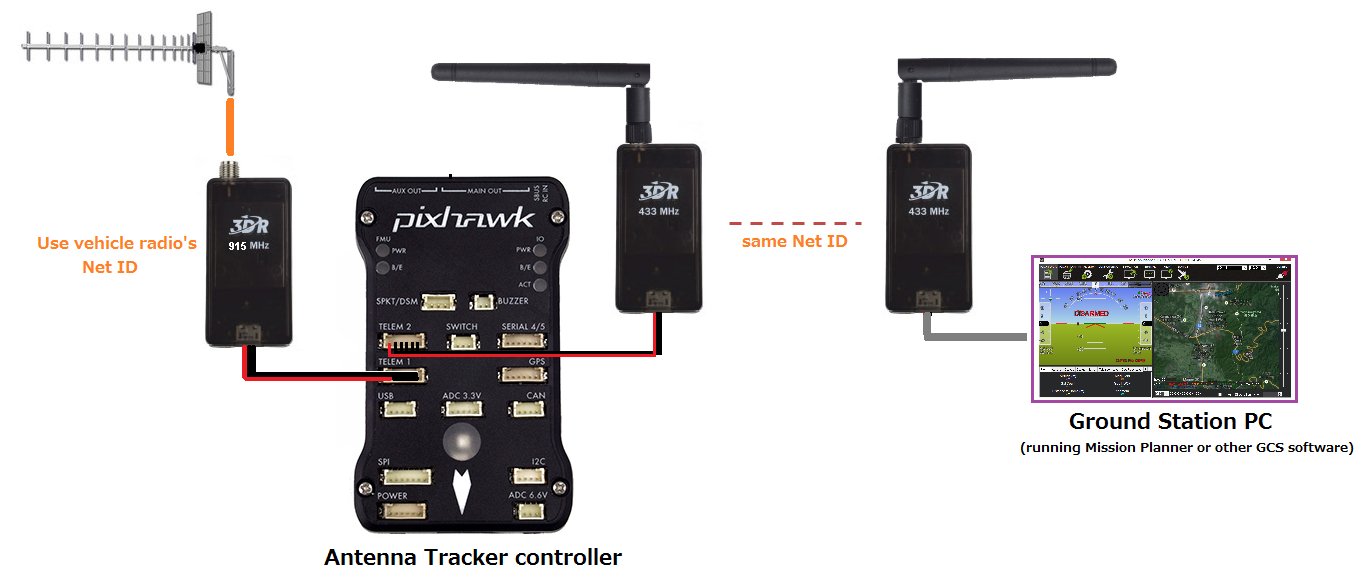
For my first Tracker, I essentially copied Randy’s project which is described in the WiKi. It was built several years ago and is detailed here. We all use the EZTracker which was sold from ReadyMadeRC at the time. I recently updated the Pixhawk firmware to v1.1 because it had the fix for the Battery Monitor…which I had been waiting years for and was very happy to use it. It still works great using the SITL vehicle connection from Mission Planner. Our flying season hasn’t started yet so my plan is to test it more this summer.
My second tracker was a quick build designed to be a smaller table top version using the inexpensive LOBOT 2DOF PTZ parts and servos along with some smaller components. It was essentially the same type of tracker as my first one where the pitch ranged from 0 to 90 degrees and the yaw was 180 degrees. This limitation is designed around a typical AMA flying field where we never fly behind ourselves.
My point here is that I can only confirm that my one type of tracker works. It might be a good test for you to initially try the same setup and see if you have some success. For the testing, you can simply remove your yagi antenna and stick with initially just testing the tracker. Use a servo tester or receiver to validate the servo positions against the SERVOx_MIN and SERVOx_MAX settings. Depending upon the servo used, the PID settings may need to change from the default settings below.
Good luck on your future testing!
SERVO1_FUNCTION,71
SERVO1_MAX,2200
SERVO1_MIN,900
SERVO1_REVERSED,1
SERVO1_TRIM,1500
SERVO2_FUNCTION,72
SERVO2_MAX,1000
SERVO2_MIN,1900
SERVO2_REVERSED,0
SERVO2_TRIM,1500
YAW_RANGE,180
YAW_SLEW_TIME,2
YAW_TRIM,0
YAW2SRV_D,0.05
YAW2SRV_FF,0.02
YAW2SRV_FLTD,0
YAW2SRV_FLTE,0
YAW2SRV_FLTT,0
YAW2SRV_I,0
YAW2SRV_IMAX,4000
YAW2SRV_P,0.2
PITCH_MAX,90
PITCH_MIN,0
PITCH_SLEW_TIME,2
PITCH_TRIM,0
PITCH2SRV_D,0.05
PITCH2SRV_FF,0.02
PITCH2SRV_FLTD,0
PITCH2SRV_FLTE,0
PITCH2SRV_FLTT,0
PITCH2SRV_I,0
PITCH2SRV_IMAX,4000
PITCH2SRV_P,0.2