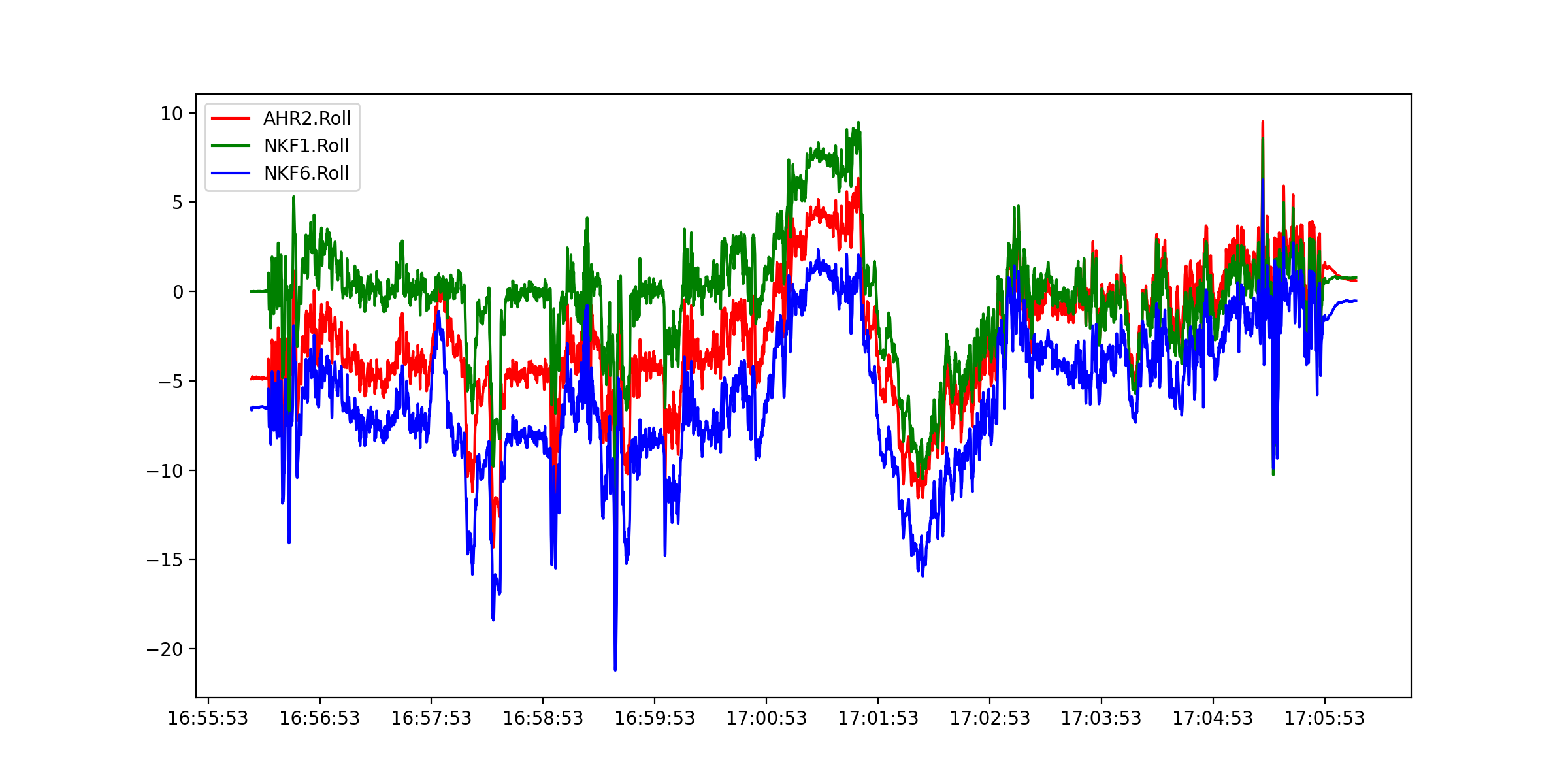
please, help me evaluate my copter’s performance. I just performed an autotune on all 3 axis and here I am sharing a log from my first test flight after:
Honestly, I cannot see/feel much difference between now and before. The quad seems to fly just fine without any issues. But when I look into the logs and charts I see worse numbers.
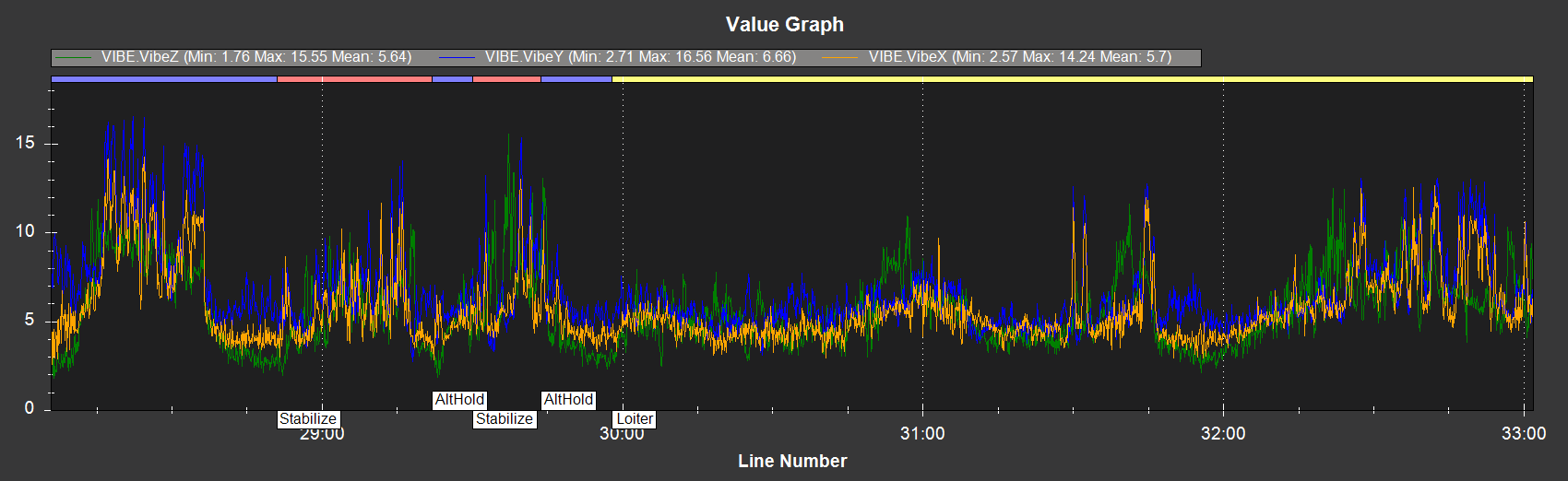
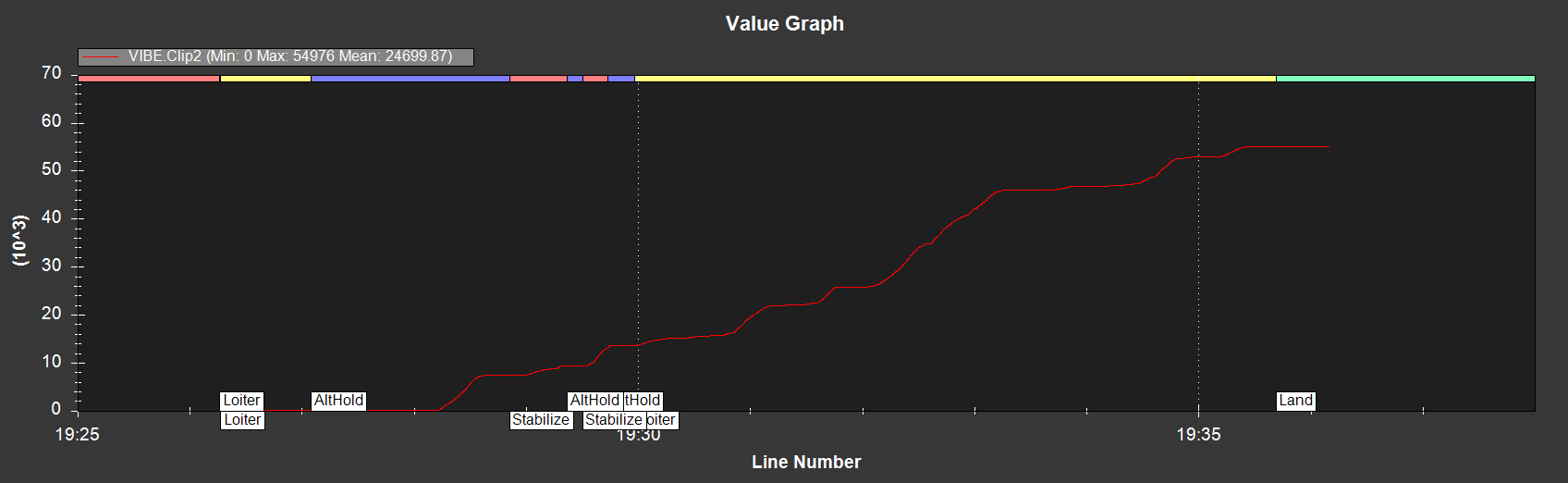
This is VIBE (before the absolute max was 10-15 m/s):
I don’t know what else to look for. And I don’t even know how really bad the performance and tune are, could you tell? When doing the autotune I lowered the aggressiveness to 0.084 (0.1 being the max).
Note. I don’t need the quad to fly fast nor to respond extremely quickly. I want to achieve a stable, reliable flight with minimum vibrations and risk of failure. God knows, maybe the log is good and I am worrying about nothing.
I would reset the PID’s back to the Initial Tuning values. Configure the Dynamic Notch Filter. Set Auto Tune aggression to default (0.1) and then run Auto Tune again.
@dkemxr : Dave, I will do everything as you said, but I have to wait for a calm day first. As for the dynamic notch filter, I have to read up something on it. It looks promising.
@hosein_gh : Thanks a lot for the charts. About the clipping issue. I noticed there are 3 clipping data in log. VIBE.Clip0…2 As I see the first two are at 0 and the last one is drawing the line all the way to 55k. Could maybe a tiny loose telemetry cable be the culprit? Otherwise, everything is tied up and I don’t see what could be hitting the flight controller.
Also when I inspect some older logs I see the same issue with VIBE.Clip2