Introduction
Hello Ardupilot Community ! My name is Arsh Pratap and I have been selected again this year to work with this amazing community under the GSoC’ 23 programme . The title of my GSoC project for this term is Improvements for the Native DDS Support in Ardupilot and just as the name suggests will be a natural extension for my last project (blog details below)
which focused on primarily providing DDS Support for Ardupilot .
Before we start , I would like to thank my GSoC mentors @tridge and @rhys for helping me with setting up the project architecture and planning out several of the involved project tasks. I would also like to thank my friend @rfriedman for helping me with a lot of the nitty-gritty involved with ROS-2 projects , for always reviewing my PRs and providing valuable suggestions on improving the said pull requests.I would also like to thank @jmachuca , my GSoC mentor for the previous term without whom much of this project wouldn’t have materialised and would also like to thank @james_pattison for helping me with initial research involved with this project.
Recap
In my previous GSoC project , I had worked on implementing an XRCE-DDS client for Ardupilot vehicles so as to provide them with native DDS publisher functionalities.
Link to original PR :
To further aid with the task of connecting with the ROS-2 domain we had utilised two different approaches :
- Micro-ROS Agent (official approach ) : With directly connecting with the Micro-ROS agent we are directly able to publish topics in the ROS-2 domain and have them received by ROS-2 subscribers. Youtube Video Link
- Micro-XRCE Agent (alternative approach) : We connect to the native XRCE Agent but require assistance from eProsima’s Integration Service to further carry out the task of connecting XRCE clients to the ROS-2 nodes. Youtube Video Link
It was followed by the creation of the ardupilot_ros2 repo that consisted of :
- ROS-2 interface consisting of definitions for customised messages.
- ROS-2 - DDS .yaml files that serve as Configuration files for setting up Integration Services
- ROS-2 subscribers for listening into the ROS-2 standard messages and customised messages defined above.
An in-depth explanation for the project can be found here at my GSoC’21 blog.
Link to my GSoC’21 blog :
Work Done
For this term, our vision was to heavily expand our work that was carried out previously and provide support for the following features :
- ROS-2 Subscriber Support
- ROS-2 Service Support
- ROS-2 Action Support
- Creation of a ROS-2 controller interface (described here)
Target Dependencies
For this project , we have decided to issue Ubuntu 22.04 as the target Operating System for testing out our work.
Also on the ROS-2 side , we are currently targeting the following versions :
- ROS-2 Humble
- Gazebo Garden
For all the interested readers out there who are ready to test out and replicate our work , make sure the above dependencies have been met.
UDP Support
In the previous term , Serial Transport was chosen as the standard mode of transport from the Ardupilot side for connecting the XRCE Client with the XRCE Agent. In this term, @tridge had provided us with the feedback that we should expand our mode of transport for DDS to support UDP based communication so as to sync in with the future STM32 boards (which are going to have a strong focus on the ethernet ports) .To carry out the task , we submitted the following patch based on the work done on this branch.
Link to original PR :
A huge thanks to @tridge in helping me with working on the UDP Transport functions in sync with the XRCE Client libraries.
Subscriber Support
Similar to how the publisher functionality was implemented we were able to submit a PR that provided subscriber support for the ROS-2 Joystick message.
Link to original PR :
Services Support
For developing support for ROS-2 services , we have decided to utilise the following architecture :
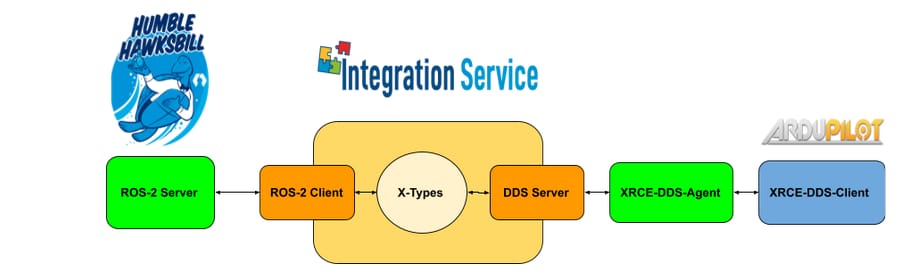
To summarise the above architecture :
- In place where Ardupilot is supposed to act as the server , Ardupilot creates a Replier entity (described here in the DDS Client Docs) that connects with a corresponding ROS-2 client (requesting access on the same services) via the Integration Service configuration file that handles the topic/service name mapping involved.
- In place where Ardupilot is supposed to act as a client , Ardupilot creates a Requester entity (described here in the DDS Client Docs) that connects with a corresponding ROS-2 server (providing access on the same services) via the Integration Service configuration file that handles the topic/service name mapping involved.
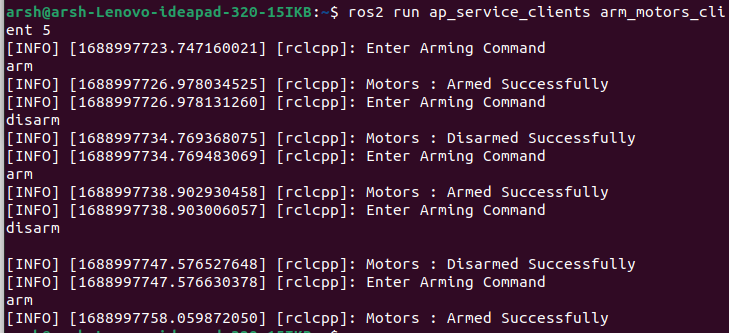
We submitted a work in progress draft PR that aims to provide arming and disarming service and the Ardupilot vehicles can effectively be armed/disarmed from a ROS-2 node.
Link to original PR
Demo
ROS-2 Arming Service
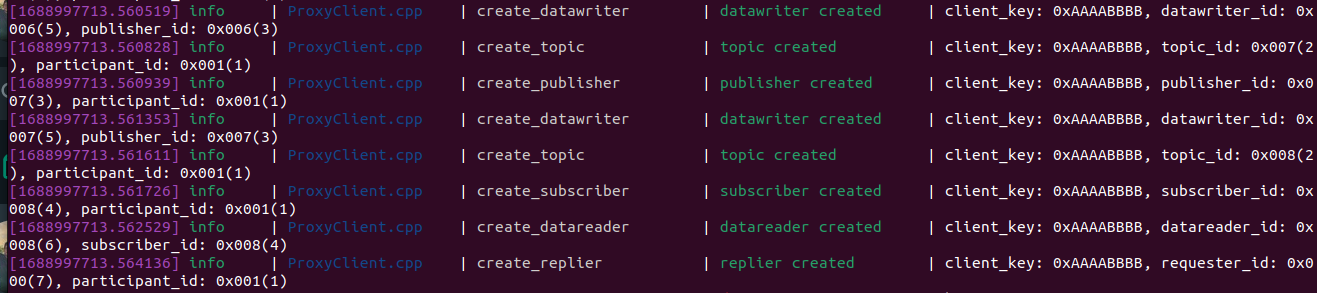
Ardupilot Console (replier created successfully)

Ardupilot Console (Arming/Disarming Request recieved)

XRCE Agent Console (replier created successfully)
Full Console Log available Link :
Integration Service Console
Full Console Log available Link :
Examples Repo
Given the lack of docs and examples pertaining to the varied use cases involved with implementing/using the XRCE Clients , we have created our own Example repository : ROS2 DDS Service Demo to test out several different test/use cases involved with the project. Currently you can find the following examples :
- A DDS Client acting as Server for
AddTwoIntsservice - A ROS-2 Client acting as Server for
AddTwoIntsservice with an XRCE Client acting as the service client - A DDS Client acting as a Server for the custom ArmMotors.srv service file
Custom ROS-2 messages, services and clients
As described above the ardupilot_ros2 package was refactored into now having custom interfaces for ROS-2 services and ROS-2 clients. The repo currently has service definition and ROS-2 client for Arming/Disarming motors and a similar ROS-2 client is expected for Switching Drive Modes for vehicles.
A big thanks to @rhys for helping me with overhauling the build process by integrating the work done in this repo with the Ardupilot codebase for simplifying the task of setting up the said project.
Current Issues
- Lack of micro-ROS agent approach for ROS-2 services : Due to the current architecture adopted for implementing support for ROS-2 services, the project in its current state has become a bit more complex and there is a major need of simplifying the said architecture. For this we are actively looking for a solution to directly integrating the XRCE service replier with the Micro-ROS Agent , as I believe this would help in simplifying the project and make it easier and streamlined for everyone around to set up the said project.
Link to Current Issue :
- ROS-2 Server : While we mentioned having a ROS-2 server example above, it seems there is a bug in the project where even though the demo example has been setup and initialised correctly (with proper/error-free messages being logged onto the Integration Service terminal) , there is no output currently being detected on the DDS Client Side.
Future Updates
I am looking forward to the following exciting updates for the project :
- Once the ROS-2 services are rightfully implemented , I would love to initiate my work on implementing support for ROS-2 Actions. Currently, there is a very early WIP branch here, which is aimed to further be updated with new details.
- I am also planning to look into working on the ROS-2 controller interface , once the ROS-2 service support is fully merged. I had a very interesting talk with @rmackay9 and @rfriedman , and they have provided me with some really interesting updates and pathways to tackle this task and I am very excited to work further on this task.
- We are also planning to implement a custom XRCE profile creation feature that would help the users generate the said based on their requirements
- Adding some Gazebo Examples for Using ROS-2 along with Ardupilot
- One of most exciting updates that I am really looking forward is the work of my friend and fellow GSoC mentee @pedro-fuoco . I truly believe his GSoC project will provide for an excellent and valuable add on to the current DDS/ROS 2 functionalities present in Ardupilot.
Thanks