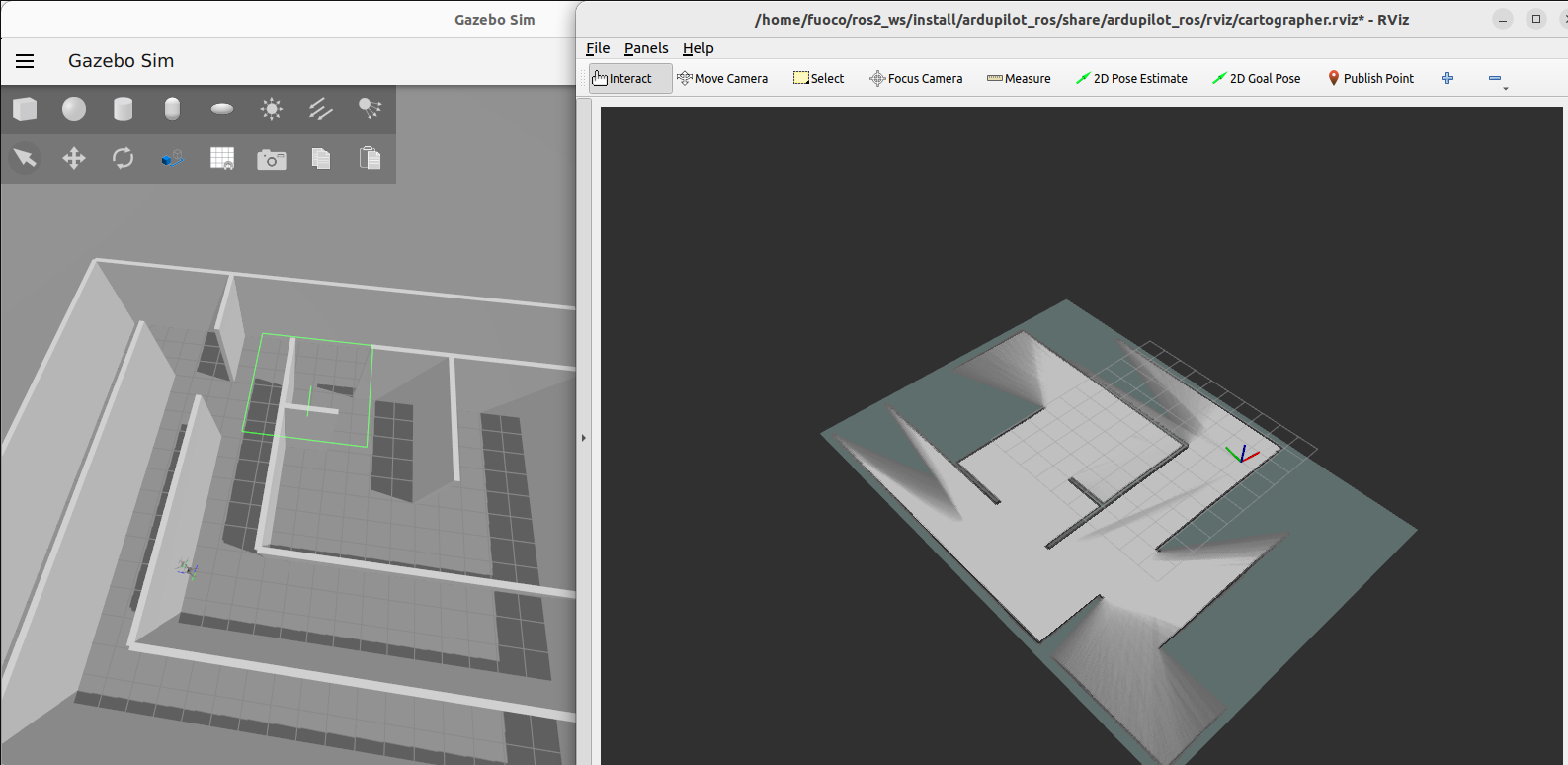
I’ve worked on running Cartographer with the simulation environment and it is currently working pretty well! I still have some tweaks to do regarding launch file options and the tf tree, but it is pretty functional for now. Looking into some of their examples and mimicking their rviz setup is also probably worth it.
I’m also going to add foxglove alternatives for visualization
Thanks a lot to @rhys for the huge help to get everything perfect.
I’m currently working towards adding pre-commit to ardupilot_gz
@rfriedman is currently working on the external odometry source prerequisite, I will try to help him out as much as I can. @tridge gave me a masterclass on EKF some weeks ago and I’ve used my notes to provide some info.
The GSoC Midterm Evaluation deadline is on July 14th, I will work towards having a PR to Ardupilot_wiki explaining how to setup the simulation and run cartogrpher on it so it is easily accessible for the whole community.
@Ivan_Rulik is currently working on some Ardupilot/ROS 2 documentation so I will take a look at his work and build from there.