I got an FC Aocoda-RC H743, which doesn’t provide main/aux out (At least there are no related prints on the silkscreen.) Can I wire as follows, and how to configure the FC?
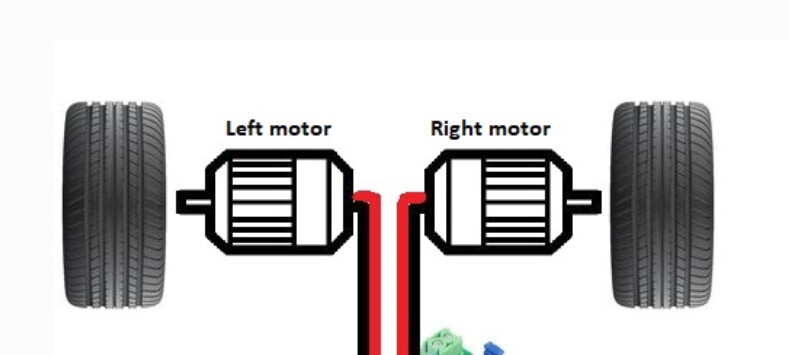
S1 – ESC – left motor
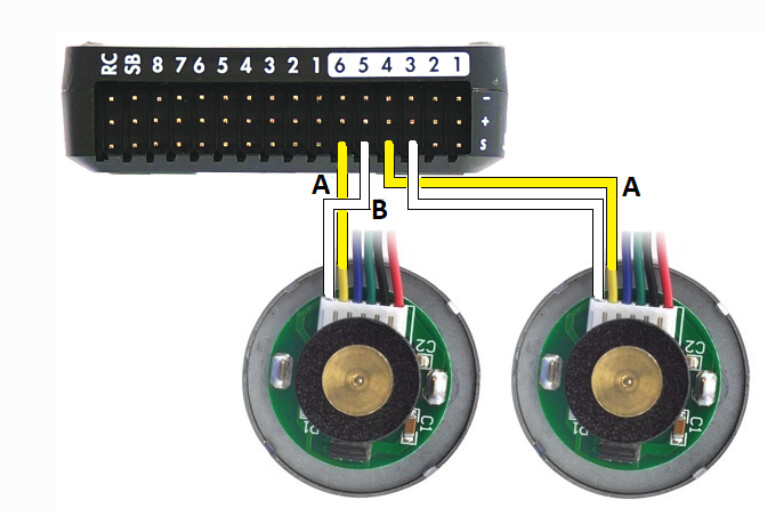
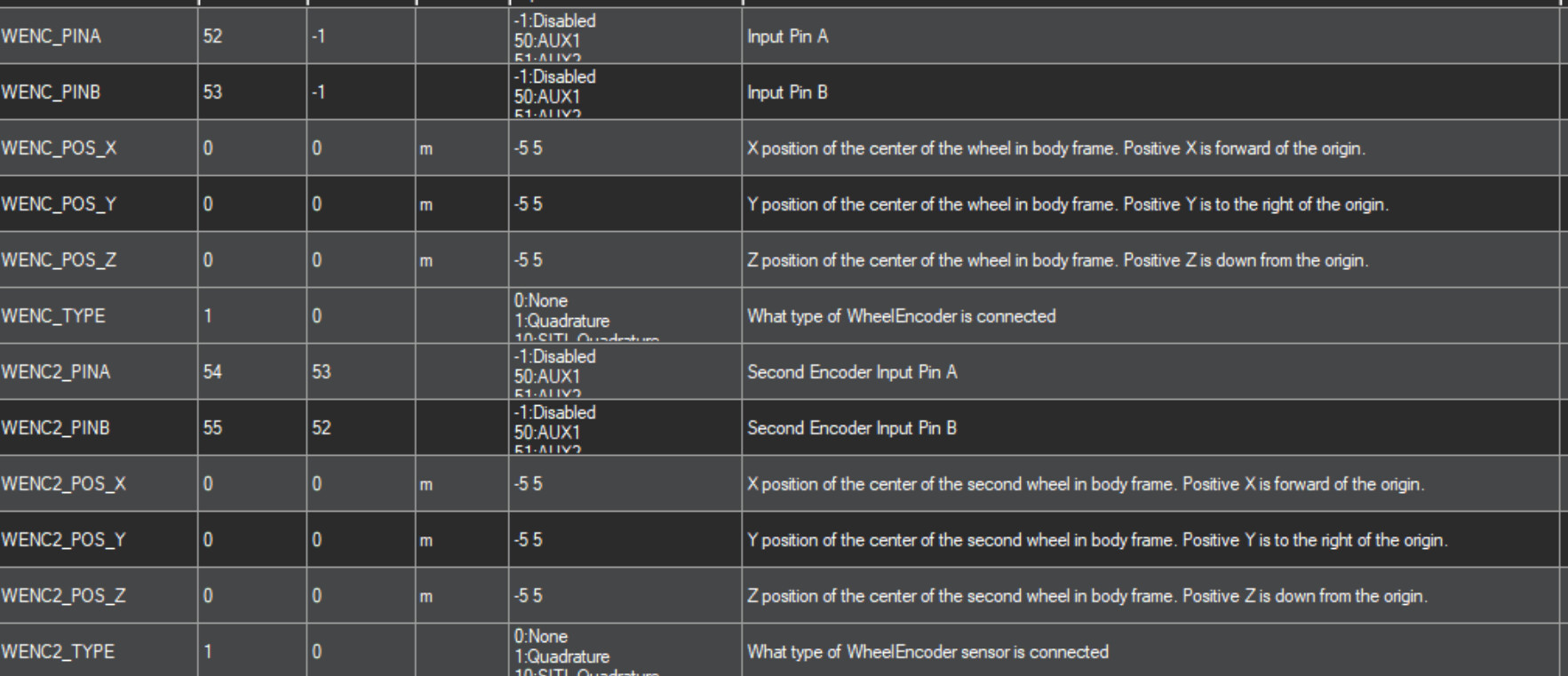
S3 – left motor encoder B
S4 – left motor encoder A
S2 – ESC – right motor
S5 – right motor encoder B
S6 – right motor encoder A
For maximal flexibility connect the encoders to S5, S6, S9, S10 since that’s the only group with 4 outputs on the Aocoda. But it doesn’t matter unless you plan to add lots of servos and dshot motors.
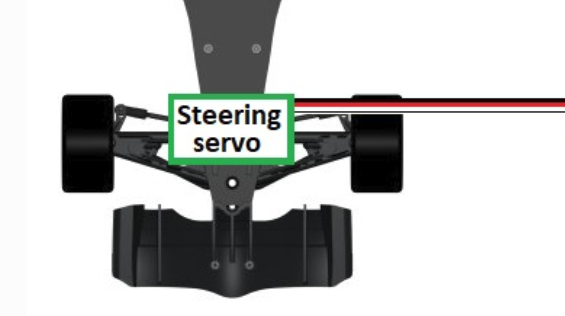
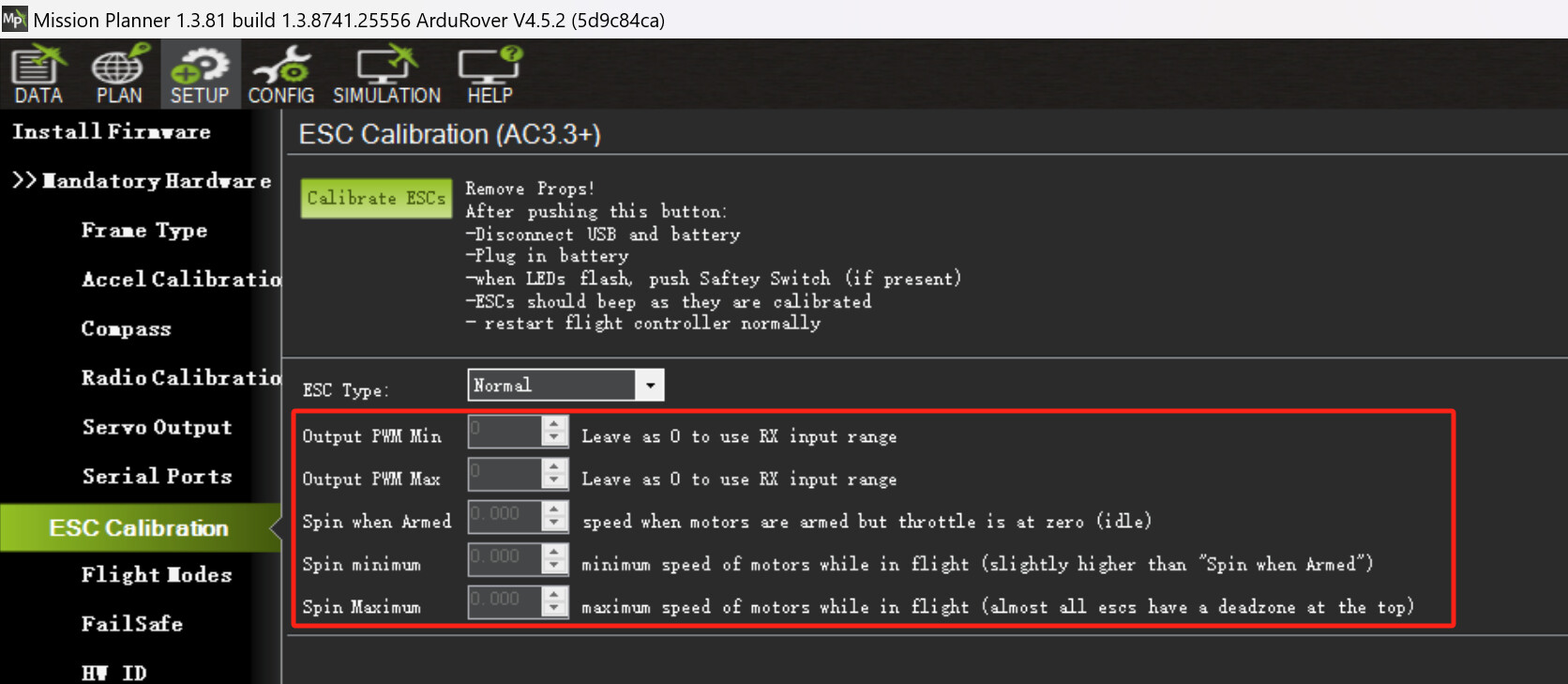
Now, except steering servo is OK, I have following issue:
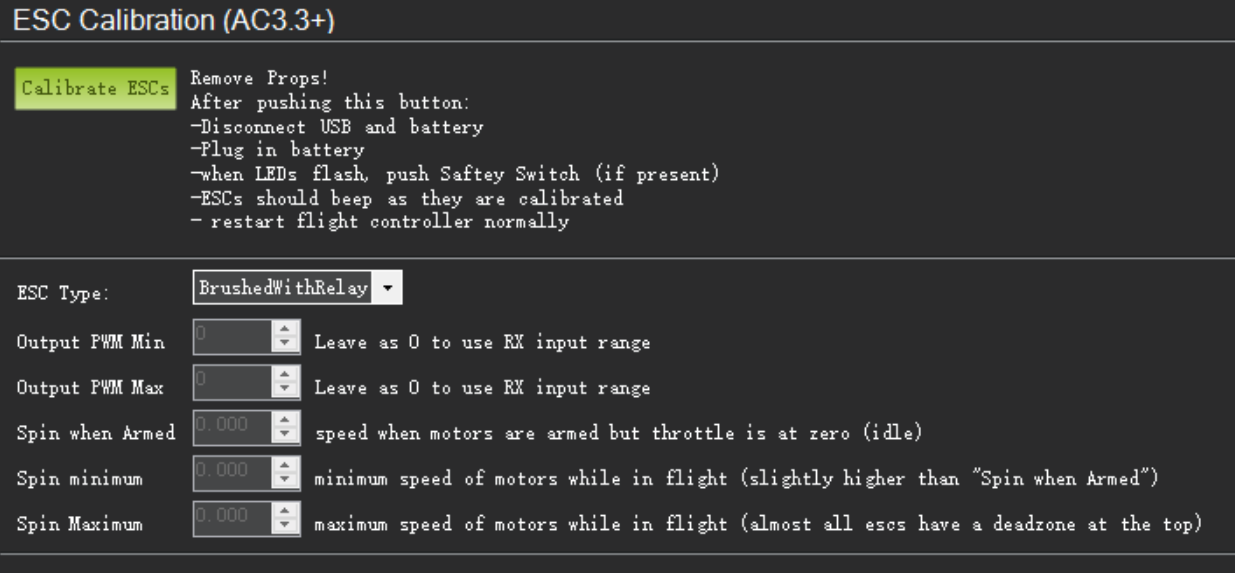
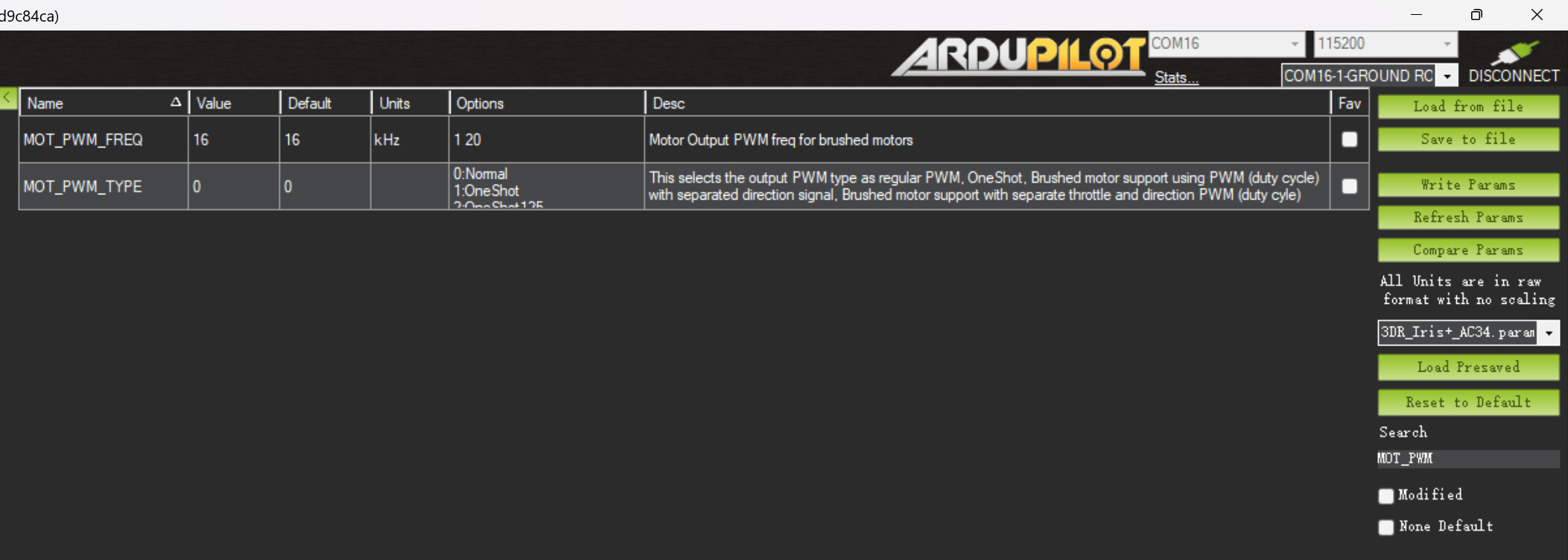
a) motor are running when I first selected BurshedWithRelay( I can’t stop, so remove the power)
b) the motor never spins again when repower or reboot
c) MP continously report “bad compass health”. Yes I didn’t connect the GPS, but I have disabled arming check, why it still report “bad compass health”?
Is there any other settings I am still missing here.
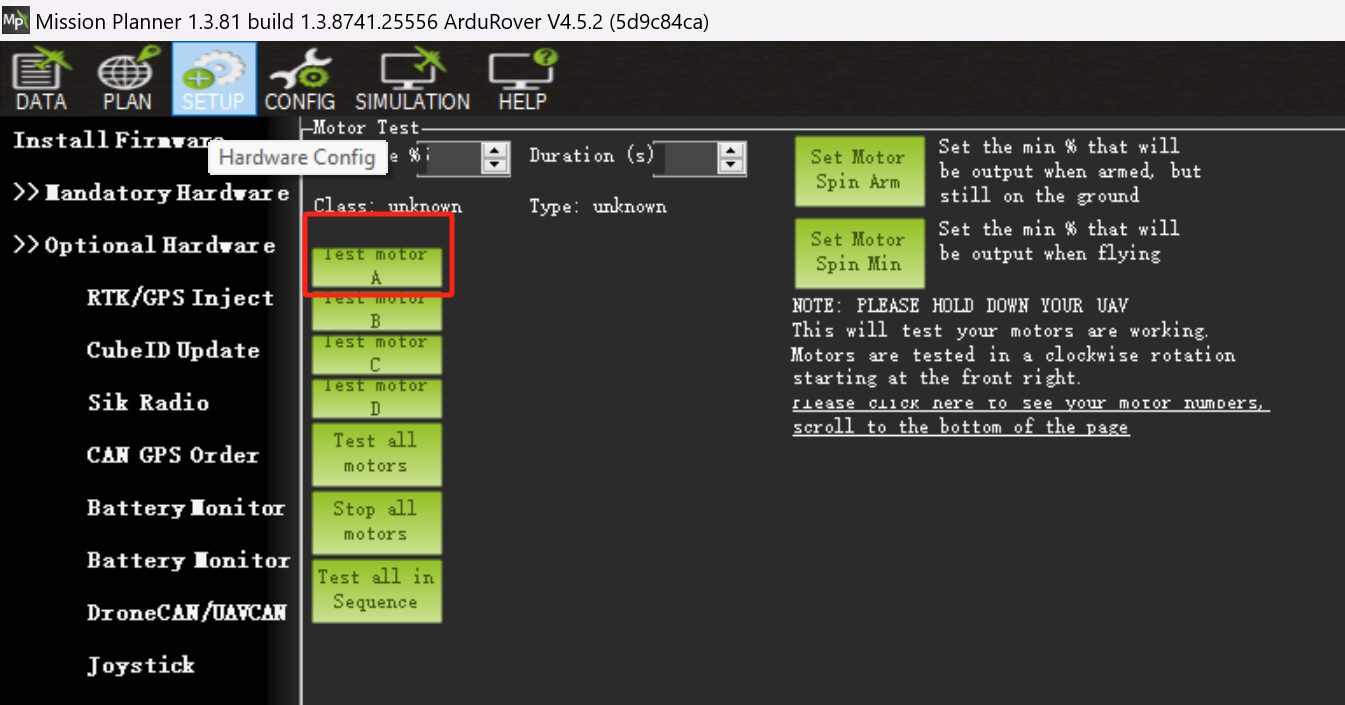
Now, A(no response)–>B(steering servo action)–>C(right motor spin forward)–>D(left spin forward)
But I still can’t control it by RC controller. And it’s quite different from Can’t get throttle output… I don’t find BRD_SAFETY_ENABLE param.
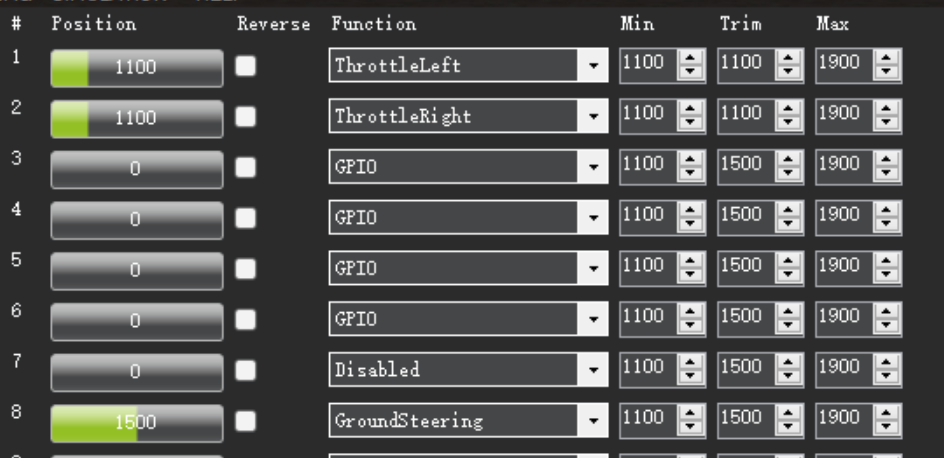
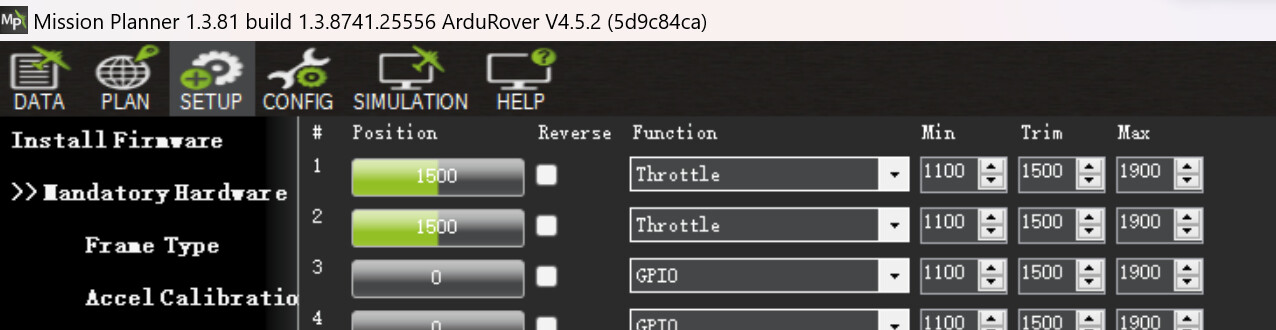
You can not set the motors to throttle left/right and use ackermann steering at the same time. Set both motor outputs to throttle.
The problem is, throttle left/right will control your rover with skid steering. The steering input is translated to a rotation speed, even if the rover is standing still (pivot turning). This would require 90° degree steering angle from the front wheels. Most likely not possible with a normal mechanical steering linkage. So if you use both the front axle will be dragged around by the skid steering rear motors, or the rear motors will lose traction.
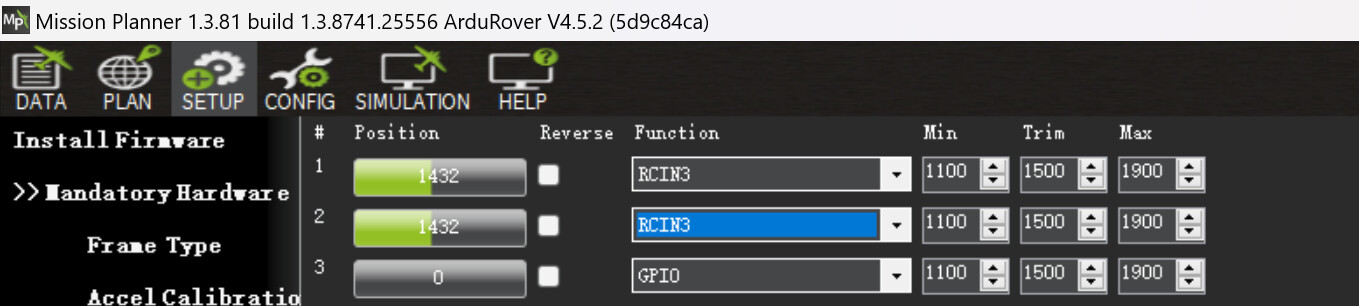
After configuring throttle, the throttle can be controlled by RC controller. But there are still some issues:
a) @stephendade set manual and arm the rover (without GPS unit, nor compass; well just ignore those warnings). Right now I don’t know what’s happening here.
b) @count74 As the above process, arm the rover from MP, it can only move forward, can’t move backward. I don’t know if it’s something to do with the “position configuration”? I fly copter most of the time, so the throttle is at 1000 by default. Is there anything I should configure ahead?