Hello, I am trying to adjust my rover, but the throttle function does not respond to RC signals (regardless of which RC channel is assigned to it).At first I thought I had changed something critical in the parameter tree and decided to reset the rover.The problem when reset to factory settings is still there ( grand steering works fine)
Arm the vehicle first.
I mean no change in the servo output (And yes I have turned on the car and it doesn’t help)
There is an arm/disarm function. It needs to be armed to get throttle output.
I mean, the throttle does not react at the initial setting (As opposed to Ground Steering)(The pix itself is on guard)
Dude, did you Arm it?
Arm/Disarm
Configure an Arm switch on your transmitter.
Are you kidding? Okay, let’s go in order so you can see what I’m thinking.
- I know how to disarm and arm
- I do the initial setup and I have nothing connected to the main outputs
- all other functions work fine
- disarming does not help.
- the problem is more with the throttle function definition
- resetting does not help.
- Changing the throttle channel does not help
No. You were talking about “turning on the car”. What does that have to do with Arming?
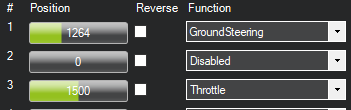
On the Radio Calibration Screen what green bar moves when you move the throttle stick?

That doesn’t answer my question does it? It’s a simple question.
I’m sorry, but I didn’t understand that.
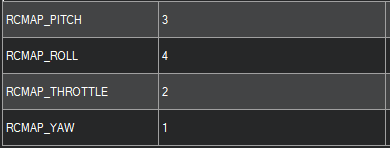
which is responsible for 2 rc channel
OK, so we have a bit of a language problem.
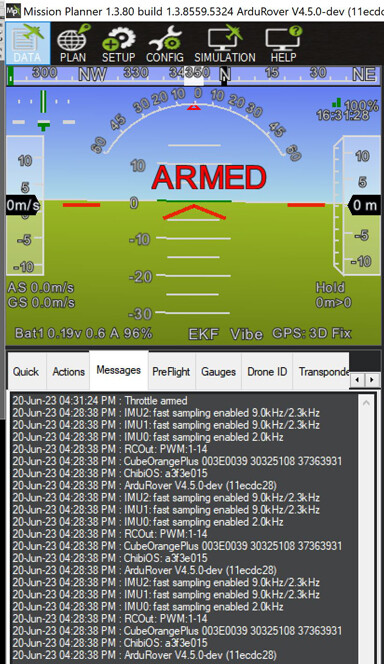
Your throttle channel is reversed. But when you try to Arm it what does the messages screen show. Does it show it armed? This is my Rover showing Disarmed.

And Armed:
our misunderstanding is not linguistic, but logical
Yes, I use a translator (even though I know the language to understand it) (I just don’t write good English)
Yes, when armed, pix writes that the throttle is armed
Post your parameter file.
parameter list.param (13.6 KB)
I have a clean version of rovers because I overwrote the pix in an attempt to fix this problem
Thanks for trying to help
Nothing to see there as you say it’s a default parameters file. Which “pix” is this?
When I say pix I abbreviate pixhawk
That’s what I’m saying, it’s very strange.and it was for understanding that I wanted to find the file in which the “throttle” function is defined.
(the file where ardupilot equates the throttle signal from the remote to the “throttle” function and then outputs it to the main port (to which I assigned the throttle) (as a programmer I am sure that such a file exists and can be modified, but I don’t know what it is called or how to open it properly)
I think there is such a file, but it is hidden from prying eyes (most likely by encryption), but for any lock
there is a key
it should look something like this(this is the C file in which I compare the incoming signal with pixHawk and convert it to the right one for my PWM driver)

The joke is that the throttle stopped working for no reason and here even resetting doesn’t help, although the ground control also sometimes won’t accept the rc signal (but this usually goes away after a restart).
Honestly sincerely would be glad not to have such problems and not to bother people from the Internet, but I have no one else to ask for help
You are on the wrong track here. Of course there are files on the flight controller but all user configuration is accessed thru the parameters from a Ground Control Station Application.
Enable disarmed logging by setting LOG_DISARMED to 1. Then restart the FC, Arm the vehicle, raise the throttle, disarm the vehicle. Then provide a link to the .bin log file created.
And which Pixhawk? There are many versions.
I like the way you think (most likely this is what I needed)but first I’ll try to do it, I’ll unsubscribe about the results
news for today:
I checked on two available devices (one of them was brand new)
Pixhawk 2.4.8