In the past I have been using these motor controllers for Balance Bot:
- Pololu dual, based on MC33926. Excellent.
- L298N with TTL glue.
- Board with IRF3205’s, driven with L6384 drivers, requiring pull-downs on PWM’s. Being too big, I stopped using it.
- Pololu controller for stepper motors.
- Several brushless controllers, including hoverboard boards.
- Dual R/C brushed controller as this:
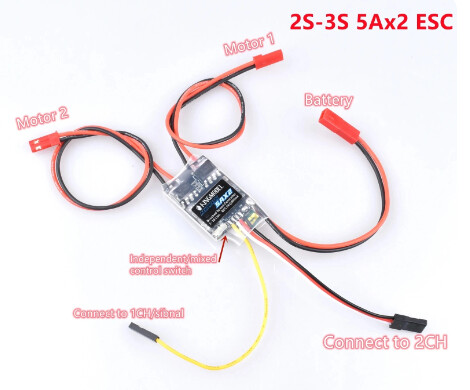
that can be used as independent controller and requires two R/C pulses (not DIRs/PWMS). It moved the balance bot correctly, but it resulted impossible to stabilize. It should be convenient for cars with two motors, it is cheap, and you can find it in several current ranges.
When assembling this balance bot with a heavy lidar on top:

I tried first the L298N, but balance was critical and difficult, so I changed to a Pololu with MC33926 dual controller, and the change was like night and day: not only changes in parameters were apparent, but stabilization was relatively easy, as seen in the video (even knocking a wall and recovering).
So if PWM controllers are stupid (they just translate immediately what is commanded on the FC generated DIR/PWM signals), what can be the reason for the different stabilization (critical and almost impossible with L298N, and easy with Pololu MC33926)?
Also similarily, why it is impossible to use the dual R/C brushed controller above?