For testing a balance bot with stepper motors, I had available two Pololu TIC T500’s and two HK42BYG250-001 stepper motors (with encoders). I had tried unsuccesfully in the past, but I didn’t dedicate much time.
This is the motor documentation:
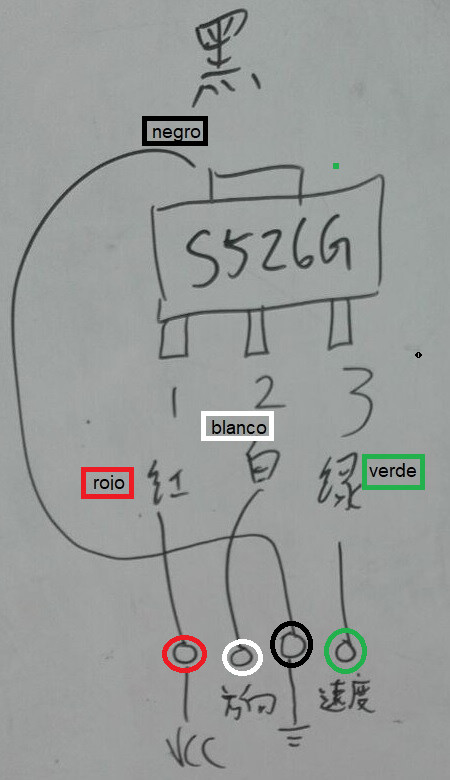
(BTW, I could assign the colors with the Android translator).
From the chip documentation (Honeywell SS526G), it needs pullups and this is the signal description:
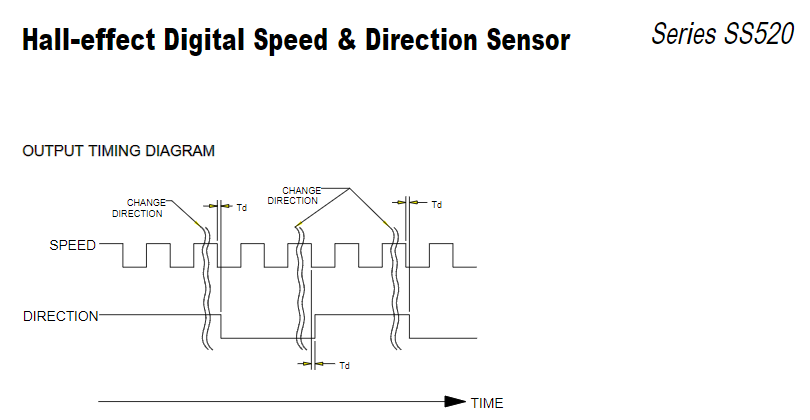
They are not the classical direct/quadrature encoder signals. This seems to consider only direct/quadrature encoder signals.
Programming the TIC T500’s for an RC pulse (bidirectional: <1500µs backwards, 1500µs neutral and >1500µs forwards) and using a servo tester (moved around 1500µs), therefore not requiring direction information from the FC (RELAY_PIN/RELAY_PIN2), I could get this oscilloscope capture:
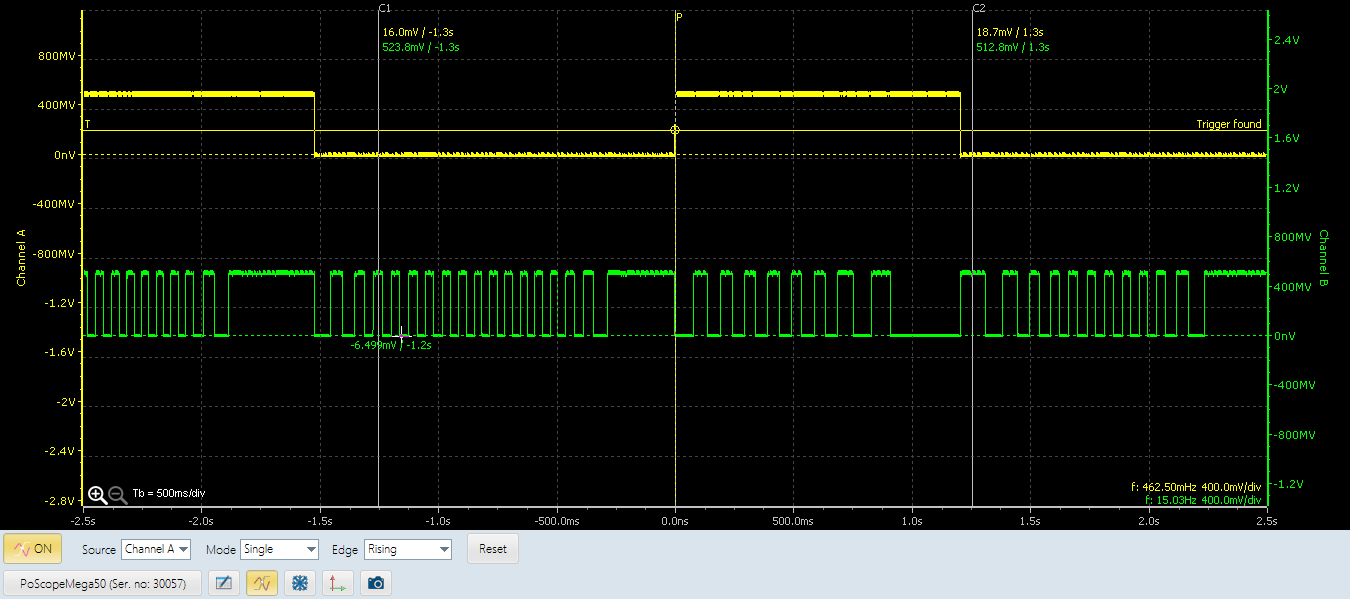
Pending to complete this balance bot setup (it can go incredibly slow with 1/8 stepping, and torque seems high), obviously I don’t know how to get WENC signals as with other balance bots.
Is any trick possible to admit speed/direction (Honeywell) instead of direct/quadrature encoder signals, or will this be supported in the future (new as WENC_TYPE=2 (Honeywell))?