Home
Blog
Stores
Docs
Copter
Plane
Rover
Sub
ArduPilot Discourse
I'm struggling to build a autonomous rover for college degree
ArduRover
Miscellaneous
Webillo
(Webillo)
December 27, 2022, 6:12pm
9
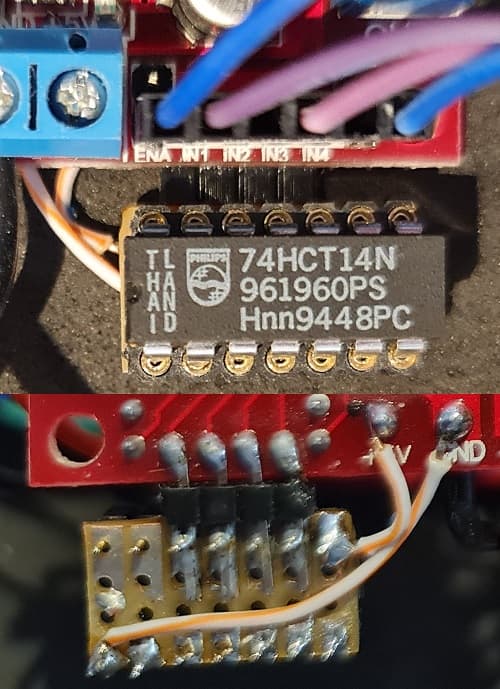
This is the modification:
image
500×689 53.6 KB
and
this
a video of a balance bot with it on a L298N:
Need urgent help setting up L298N V2 motor driver and DC Geared Motor using Pixhawk
Different motor controllers for Rover Balance Bot
Finally found the solution for l298n motor driver with Pixhawk!
Slew rates on servo output
show post in topic